
基于模板匹配的集中式多传感器群内目标精细跟踪算法
2016-10-12 07:12:57王海鹏贾舒宜林雪原唐田田
海军航空大学学报 2016年4期
王海鹏,贾舒宜,林雪原,唐田田
(海军航空工程学院信息融合研究所,山东烟台264001)
基于模板匹配的集中式多传感器群内目标精细跟踪算法
王海鹏,贾舒宜,林雪原,唐田田
(海军航空工程学院信息融合研究所,山东烟台264001)
为解决多传感器探测下群内目标精细跟踪的难题,基于非机动情况下各探测周期内群内目标真实回波位置相对固定的特性,提出了一种基于模板匹配的集中式多传感器群内目标精细跟踪算法。该算法通过预关联成功的群状态集合与群量测集合分别建立模板形状矩阵和待匹配形状矩阵,利用匹配搜索模型和匹配矩阵确认规则选出代价最小的匹配矩阵,并基于模板和对应的匹配矩阵利用kalman滤波完成群内各目标航迹的状态更新。仿真表明,与传统多传感器多目标跟踪算法中性能优越的基于数据压缩的集中式多传感器多假设算法相比,该算法在跟踪精度、实时性、有效跟踪率方面的性能明显优越,能很好的满足群内目标精细跟踪的实际工程需求。
模板匹配;多传感器;群内目标;精细跟踪
在现实环境中,经常因为不可控制或特定人为目的等因素,会在一个较小的空域分布范围内构成一个复杂的目标群,如空间碎片的分裂、弹道导弹突防过程中伴随的大量碎片及诱饵、掠海飞行的导弹和飞机群等,这些目标空域分布范围较小,运动特征差异不明显,相对运动速度较低且特性接近。目标跟踪领域将此类目标称为群目标[1-7]。
在一些实际应用中,与群的整体态势相比,往往更关心群内个体目标的情况[3-6]。例如,航天器在轨爆炸后所产生的空间碎片会形成一个群目标,这个群目标将会严重威胁太空安全,为消除太空安全隐患,必须精确掌握每一个碎片的运动轨迹,简单跟踪群整体已无法满足工程实际需求;再如,当面对敌方群飞机突防时,为更好地进行战术拦截和打击,要求在探测系统只能部分分辨飞机群的条件下,尽可能精确地估计出群中飞机的个数及各架飞机的运动轨迹,以便为后续的作战决策提供精确的信息支持。此时,为改善跟踪效果,工程上通常利用多套不同的设备、从不同测向获取群目标测量数据,进行数据互联和融合等处理,多传感器探测下群内目标的精细跟踪成为必须解决的问题。
但传统的多目标跟踪算法[8-17]难以有效跟踪群内目标,因为与传统多目标相比,杂波环境下群内目标的回波特性明显复杂,传统跟踪算法对群目标回波复杂性考虑不足,漏跟、错跟、多跟现象严重。此外,现有群目标跟踪算法[18-27]大多基于群整体进行跟踪,未考虑群内目标的精细跟踪;而小部分考虑群内目标航迹维持的算法跟踪环境又相对单一,难以工程应用。
因此,为解决该问题,本文基于非机动情况下各探测周期内群内目标真实回波位置相对固定的特性,利用模板匹配[268-32]的方式区别目标真实测量和杂波,提出了一种基于模板匹配的集中式多传感器群内目标精细跟踪算法(Centralized Multi-sensor Refined Tracking Algorithm within Group Targets Based on Template Matching,CMSRT-GT-TM)算法;并建立了多种典型的仿真环境,验证了本文算法的有效性。
1 系统描述
集中式多传感器群内目标跟踪问题是在杂波中用Ns个传感器上报到融合中心的量测实现群内每个目标的状态更新。设系统的动态方程为:

式(1)中:Xt(k+1)∈ℝn(k=1,2,…;t=1,2,…,Tg)是k+1时刻目标的全局状态向量,Tg为第g个群中的目标个数;F(k)∈ℝn是状态转移矩阵;Γ(k)∈ℝn,h为噪声分布矩阵;Vt(k)是离散时间白噪声序列,且E[Vt(k)]=0,E[Vt(k)Vt(k)T]=Qt(k)。

k时刻融合中心所获得的综合观测向量为:

并假定各传感器间的量测误差是统计独立的。
2 CMSRT-GT-TM算法
2.1基于群整体的预互联
设G(k-1)为k-1时刻群航迹状态更新值和协方差更新值的集合:

式(4)中:t=1,2,…,Tg(k-1),Tg(k-1)为k-1时刻群的个数;为k-1时刻第t个群中的目标个数。
针对第i个传感器上报的量测集合Zi(k),利用循环阙值法[33]进行群的预分割。设)为分割后获得的第l个群量测,为)中的量测个数。设的中心点,为群Gt(k-1)中心航迹的状态更新值和协方差更新值。此时,群量测与群航迹的互联,暂时转变为之间的互联。与传统目标相同,以的一步预测值为中心,建立关联波门。若满足式(5),则认为落入关联波门内。

通常情况下,群与群之间相距较远,落入同一关联门的概率较小;假如同一传感器有多个群量测落入同一关联波门内,基于最近邻域的思想,选取最近的群量测为关联量。设各传感器上报量测中与Gt(k-1)关联成功的群量测集合为:

式中,N′s为存在关联群量测的传感器个数。
2.2模板匹配模型的建立
基于预关联成功的Gt(k-1)和,建立模板匹配模型,剔除杂波并实现群内航迹与真实量测的互联,具体过程分为以下4步。
2.2.1模板形状矩阵的建立
基于Gt(k-1)建立模板,具体过程与文献[34]中云雨杂波剔除模型相似。设Gt(k-1)中位置状态更新值在x、y方向最大值和最小值的集合为,基于Exy(k)构建矩形A,如图1所示。
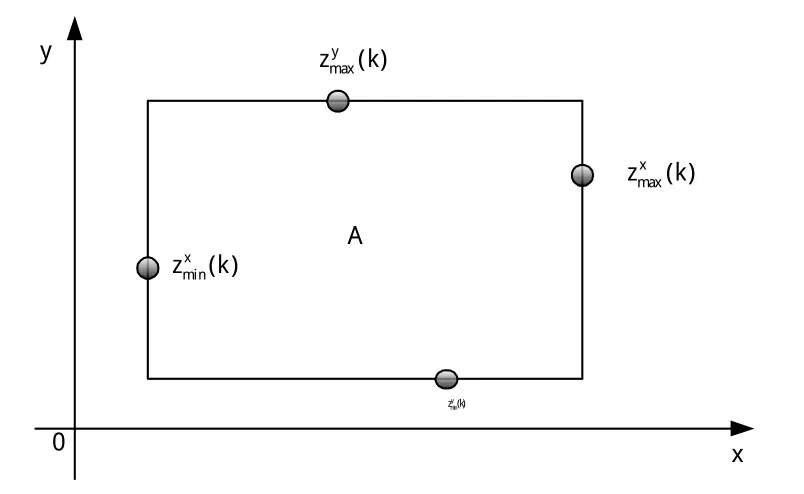
图1 量测区域示意图Fig.1 Area of the measurements

式(7)中:ωi为k时刻传感器i的位置;ωt为目标t的真实位置;为服从高斯分布的随机噪声;在传感器探测区域内服从均匀分布。
当群目标不发生机动时,群内各目标真实位置构成的图形在相临时刻是基本一致的;受量测误差的影响,量测值会发生一定的摆动,由式(7)可知,在x、y方向摆动的范围大致为按图2的方式将矩形A划分成多个小矩形,其中,μx、μy分别为x、y方向上的划分依据,其定义为:

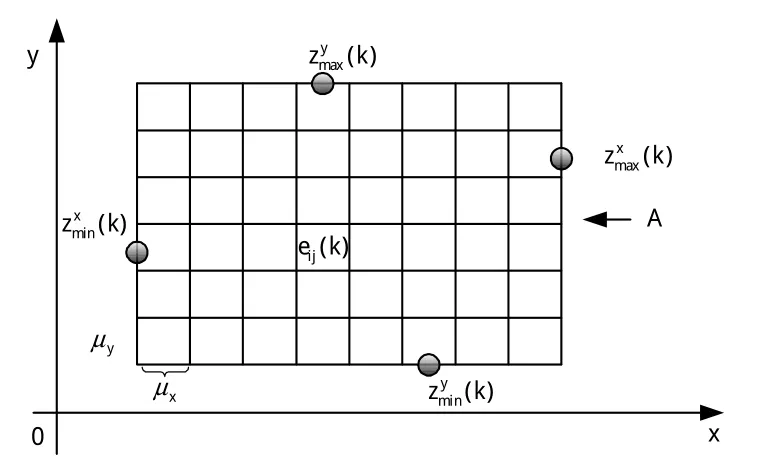
图2 矩形A划分示意图Fig.2 Segmentation of rectangleA
定义矩形A模板形状矩阵为:


2.2.2待匹配形状矩阵的建立
3)基于有无量测落入小矩形中建立待匹配形状矩阵


2.2.3匹配搜索模型的建立
匹配搜索模型如图3所示。
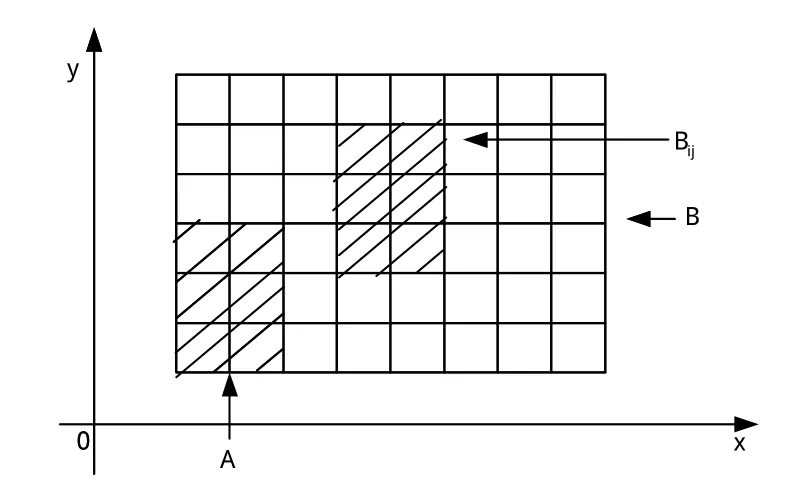
图3 匹配搜索模型示意图Fig.3 Matching search model
以矩形B在x、y方向上最小的矩形为起点,将矩形A嵌入B内,基于与建立Bij与A的匹配度矩阵为:

2.2.4匹配矩阵的确认
矩形B中满足匹配条件的Bij可能有多个。在此,通过建立匹配代价矩阵确定最终的匹配矩阵。基于传感器s的匹配度矩阵定义匹配代价矩阵为:
式(18)中,di′j′为Bij中第i′j′个方格中量测与模板A对应方格中所包含目标状态一步的预测值的差值,即

同时,储存Bij各方格中用于计算di′j′的量测集对s个传感器,均建立取代价最小的矩阵为匹配矩形,记中各方格的互联量测集为
2.3群内航迹的状态更新
基于Gt(k-1)和利用模板A和匹配矩形若落入A中的小矩形ai′j′中,则基于落入中的量测利用kalman滤波完成状态和协方差更新。
在此,需要注意的是,在完成群内所有航迹的状态更新后,还需利用当前时刻剩余的量测集与前3个时刻剩余的量测集进行航迹起始,并建立航迹终结原则,判断群内各条航迹是否终结。
3 仿真验证与分析
为验证说明算法性能和有效性,设定2种典型的群目标运动情况,从算法跟踪精度、实时性、有效跟踪率3个方面分析算法的跟踪性能,并与传统多传感器多目标跟踪算法中性能优越的基于数据压缩的集中式多传感器多假设(简称数据压缩CMS-MHT)算法[11]进行比较。
3.1仿真环境
假定传感器为3部2D雷达,参数如表1所示。
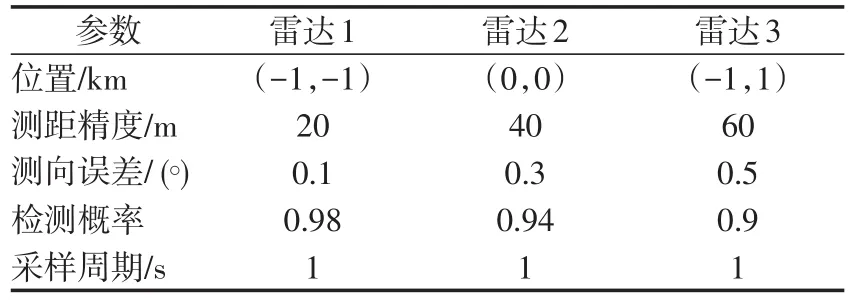
表1 传感器参数设置表Tab.1 Parameters of the sensors
环境1:模拟2个交叉运动的密集群目标。设存在8个目标,均做匀速直线运动。前4个目标组成第1个群,初始位置分别为(5km,0.8km)、(5.2km,1km)、(5.55km,1.2km)、(5.7km,1.4km),初始速度均为(-200 m/s,300 m/s);后4个目标组成第2个群,初始位置分别为(-5km,8km)、(-5.2km,8.2km)、(-5.55km,8.4km)、(-5.7km,8.6km),初始速度均为(100 m/s,300 m/s)。
仿真中,杂波的产生分2部分。对目标T0而言,以T0为中心在极坐标下建立一个边长为的矩阵,在此矩阵中均匀产生λ1个杂波;对群目标G而言,计算群目标的中心点,以为中心在极坐标下建立一个边长为的矩阵(其中ΔGρ、ΔGθ分别为G中各量测在极坐标系两坐标轴上的最大差值),在该矩阵中均匀产生λ2个杂波。在此,取λ1=2,λ2=4。
环境2:为验证各算法耗时和有效跟踪率随杂波的变化情况,在环境1的基础上,杂波的取值见表2。

表2 环境3中杂波取值表Tab.2 Number of clutter in environment 3
3.2仿真结果及分析
图4为环境1中群目标真实态势图,从图中可以看出2个群目标交叉运动。图5、6分别为环境1中CMSRT-GT-TM算法和数据压缩CMS-MHT算法的均方根位置、速度误差比较图,从图中可以看出,本文算法能够对目标进行有效跟踪,均方根位置误差小于60 m,均方根速度误差小于2 m/s;而基于数据压缩的CMS-MHT算法的跟踪效果不理想,在50步以后均方根位置误差高达300 m以上,均方根速度误差高达12 m/s以上,在对跟踪精度要求较高的实际场合中已无法满足工程要求。
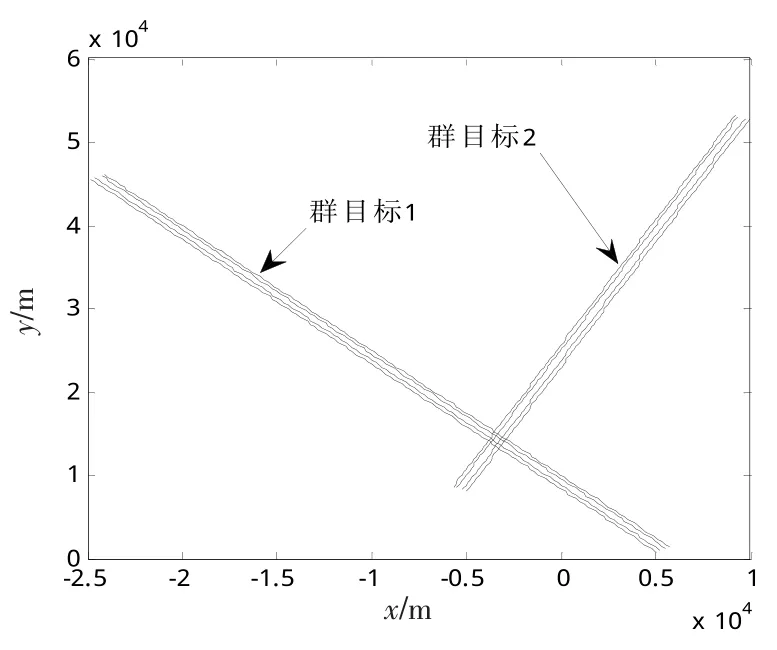
图4 群目标真实态势图Fig.4 True state of the formation targets
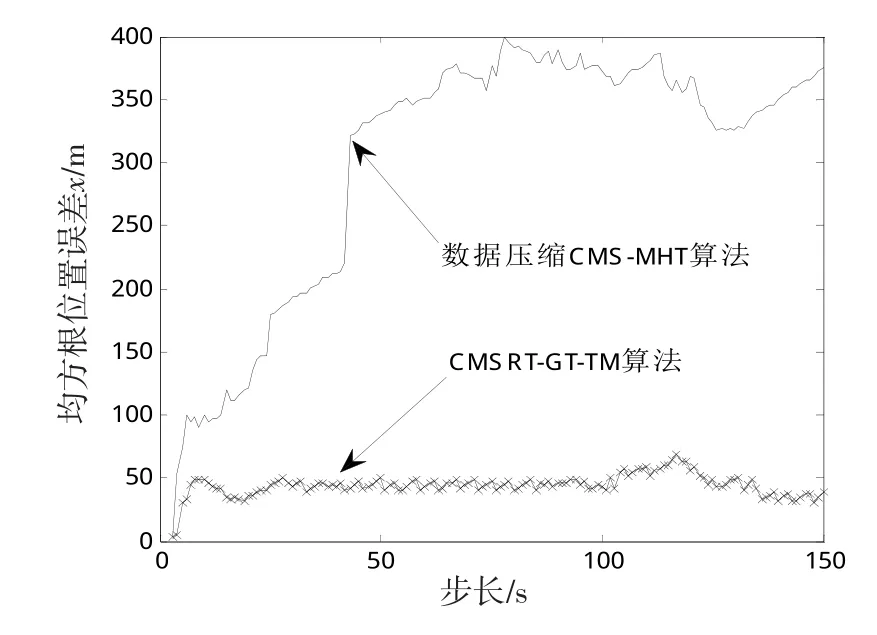
图5 x方向均方根位置误差比较图Fig.5 RMS position error atx-axis
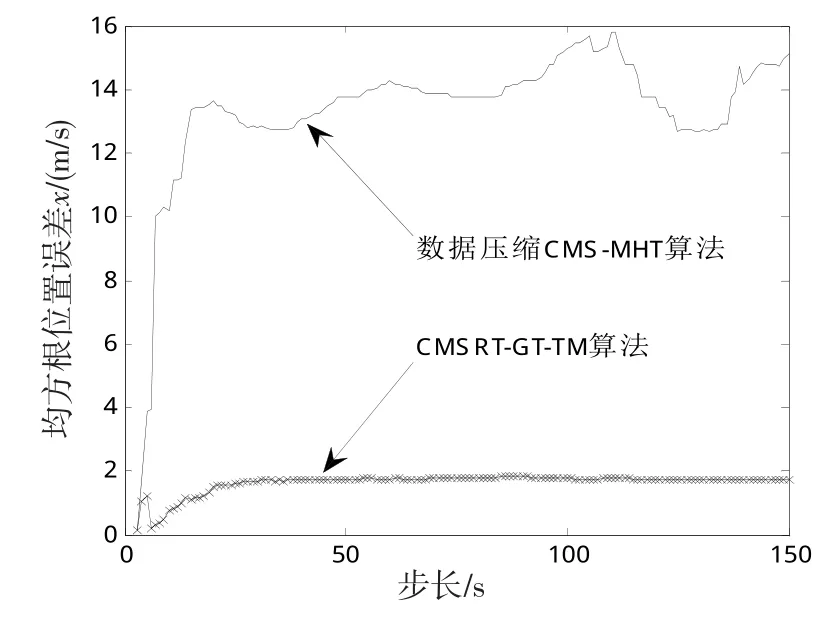
图6 x方向均方根速度误差比较图Fig.6 RMS velocity error atx-axis
表3为环境2中2种算法有效跟踪率及算法耗时随杂波数变化比较表。从表中可以看出,对应于同样的杂波数,CMSRT-GT-TM算法的有效跟踪率明显高于数据压缩CMS-MHT算法,当杂波数为(6,12)时,前者的有效跟踪率在75%以上,而后者的有效跟踪率仅为39.34%,已不能满足实际工程需求。此外,随着杂波数的增加,2种算法的有效跟踪率均有所下降,数据压缩CMS-MHT算法下降幅度明显大于本文算法。
由表3可知,随着杂波数的增加,2种算法的单次更新耗时均有所增大;数据压缩CMS-MHT算法的增加幅度较大,当杂波数为(6,12)时,其单次更新耗时已高达0.994 6 ms,在对实时性要求较高的实际场合中已不能满足工程要求;对应同样的杂波数,CMSRTGT-TM算法的单次更新耗时明显较小。

表3 各算法有效跟踪率及算法耗时随杂波数变化比较表Tab.3 Effective tracking ratio and runtime of the algorithms varied with the number of clutter
4 结论
基于非机动模式下各时刻同一群内目标真实回波整体结构的相似性,提出了CMSRT-GT-TM算法,其优点主要包括:
1)通过模板与待匹配区域的搜索匹配,最大限度的消除了杂波,并保证了群内目标结构的稳定性,不会出现群内目标交叉错误互联的情况;
2)基于匹配矩阵确认模型,在所有传感器的匹配矩阵中,获取代价最小的匹配矩形完成群内各目标的状态更新,既充分利用了多个传感器的探测信息,又避免了冗余航迹的产生。
经仿真验证表明,该算法能较好的实现多传感器探测下非机动群内目标的精细跟踪。
[1]耿文东.编队目标跟踪综述[C]//第十届全国雷达学术年会.北京:国防工业出版社,2008:367-371. GENG WENDONG.Summarizing of group-target tracking[C]//10thChina Radar Conference.Beijing:National Defense Industry Press,2008:367-371.(in Chinese)
[2]邢凤勇,熊伟,王海鹏.基于聚类和Hough变换的多群航迹起始算法[J].海军航空工程学院学报,2010,25(6):624-629. XING FENGYONG,XIONG WEI,WANG HAIPENG.A formation target track initiation algorithm based on clustering and hough transform[J].Journal of Naval Aeronautical and Astronautical University,2010,25(6):624-629.(in Chinese)
[3]PENG Z H,SUN L,CHEN J.Path planning of multiple UAVs low-altitude penetration based on improved multiagent coevolutionary algorithm[C]//30thChinese Control Conference.Yantai:IEEE,2011:4056-4061.
[4]ZHEN Q,SHELTON C R.Improving multi-target tracking via social grouping[C]//IEEE Conference on Computer Vision and Pattern Recognition.IEEE,2012:1972-1978.
[5]王海鹏,熊伟,董云龙,等.集中式多传感器群目标灰色精细航迹起始算法[J].系统工程与电子技术,2012,34(11):2244-2255. WANG HAIPENG,XIONG WEI,DONG YUNLONG,et al.Gray refined track initiation algorithm for centralized multi-sensor group targets[J].Systems Engineering and Electronics,2012,34(11):2244-2255.(in Chinese)
[6]王海鹏,董云龙,熊伟,等.运动状态下多传感器群目标精细航迹起始算法[J].宇航学报,2012,33(11):1690-1698. WANG HAIPENG,DONG YUNLONG,XIONG WEI,et al.Multi-sensor group target refined track initiation algorithm based on moving state[J].Journal of Astronautics,2012,33(11):1690-1698.(in Chinese)
[7]赵盟盟,张群,陈怡君,等.一种用于空间群目标分辨的滑动窗轨迹跟踪算法[J].宇航学报,2015,36(10):1187-1194. ZHAO MENGMENG,ZHANG QUN,CHEN YIJUN,et al.A sliding window tracking algorithm for distingushing space group targets[J].Journal of Austronautics,2015,36(10):1187-1194.(in Chinese)
[8]何友,王国宏,关欣.信息融合理论及应用[M].北京:电子工业出版社,2010:135-177. HE YOU,WANG GUOHONG,GUAN XIN.Information fusion theory with applications[M].Beijing:PublishingHouse of Electronics Industry,2010:135-177.(in Chinese)
[9]TRAN A,MANZANERA A.A versatile object tracking algorithm combining Particle Filter and Generalised Hough Transform[C]//International Conference on.Image Processing Theory,Tools and Applications(IPTA). Oreans,France:IEEE,2015:105-110.
[10]ZHOU H,GAO Y,YUAN G,et al.Adaptive multiple cues integration for particle filter tracking[C]//IET International Radar Conference.Hangzhou:IET,2015:1-6.
[11]张晶炜,熊伟,何友.基于数据压缩的多传感器多假设算法[J].北京航空航天大学学报,2007,33(12):1448-1451. ZHANG JINGWEI,XIONG WEI,HE YOU.Multisensor multipled hypothesis algorithm based on data compressing technic[J].Journal of Beijing University of Aeronautics and Astronautics,2007,33(12):1448-1451.(in Chinese)
[12]JIN Y,DING Y,HAO K,et al.An endocrine-based intelligent distributed cooperative algorithm for target tracking in wireless sensor networks[J].Soft Computing,2015,19(5):1427-1441.
[13]陈帅,郑世友,张世仓.并行多传感器多目标跟踪系统性能优化算法[J].计算机仿真,2015,32(10):69-73,122. CHEN SHUAI,ZHEN SHIYOU,ZHANG SHICANG. Centralized multi-sensor structuerd branch multiple hypothesis algorithm[J].Computer Simulation,2015,32(10):69-73,122.(in Chinese)
[14]陈金广,江梦茜,马丽丽,等.具有形状信息的多传感器群目标跟踪算法[J].计算机工程与应用,2015,51(17):210-216. CHEN JINGUANG,JIANG MENGQIAN,MA LILI,et al.Multi-sensor group tracking algorithm with information of shape[J].Computer Engineering and Applications,2015,51(17):210-216.(in Chinese)
[15]BEARD M,REUTER S,GRANSTRÖM K,et al.Multiple extended target tracking with labeled random finite sets[J].IEEE Transactions on Signal Processing,2016,64(7):1638-1653.
[16]BEARD M,VO B T,VO B N.Bayesian multi-target tracking with merged measurements using labelled random finite sets[J].IEEE Transactions on Signal Processing,2015,63(6):1433-1447.
[17]李翠芸,王荣,姬红兵.基于变分贝叶斯势均衡多目标多伯努利滤波的多扩展目标跟踪算法[J].控制理论与应用,2015(2):187-195. LI CUIYUN,WANG RONG,JI HONGBIN.Mutiple extended-target tracking based on variational bayesian cardinality-balanced multi-target muli-bernoulli[J].Control Theory and Applications,2015(2):187-195.(in Chinese)
[18]GVAN K,FGAN F.MHT extraction and track maintenance of a target formation[J].IEEE Transactions on Aerospace and Electronic System,2002,38(1):288-294.
[19]AMADOU G,LYUDMILA M.Ground target group structure and state estimation with particle filtering[J].IEEE Transactions onAuto Control,2010,37(5):1-8.
[20]HADINEJAD I,FATEMIA.Anew efficient joint probabilistic data association method for multiple target tracking system[J].Majlesi Journal of Multimedia Processing,2016,4(4):135-167.
[21]PANAKKAL V P,VELMURUGAN R.A factor graph approach for efficient JPDA implementation in multi-target tracking[C]//IEEE Aerospace Conference.Helena(MT):IEEE,2015:1-15.
[22]PLOPLYS N J,KENEFIC R J.Multiple hypothesis tracking using maximum weight independent set:USA,9,291,708[P].2016-3-22.
[23]KIM C,LI F,CIPTADI A,et al.Multiple hypothesis tracking revisited[C]//Proceedings of the IEEE International Conference on Computer Vision.Washington,D.C.:IEEE,2015:4696-4704.
[24]JAMES P F.Group tracking on dynamic networks[C]// 12thInternational Conference on Information Fusion. Washington,D.C.:IEEE,2009:930-937.
[25]LYUDMILA M.Group object structure and state estimation in the presence of measurement origin uncertainty [C]//IEEE 15thWorkshop on Statistical Signal Processing. Cardiff,UK:IEEE,2009:473-476.
[26]FELDMANN M,FRANKEN D.Advances on tracking of extended objects and group targets using random matrices [C]//12thInternational Conference on Information Fusion. Washington,D.C.:IEEE,2009:1029-1036.
[27]LIAN F,HAN C Z,LIU W F.Sequential monte carlo implementation and state extraction of the group probability hypothsis density filter for partly unresolvable group targets-tracking problem[J].IET Radar,Sonar and Navigation,2010,4(5):685-702.
[28]JAHNE,BERND.Digital image processing[M].Berlin:Springer Verlag,2005:78-85.
[29]ABDUL R M,MAHALEKSHMI M C.Automated object recognition and pattern matching analysis of runways using surface track data[C]//3rdInternational Conference on Electronics Computer Technology.IEEE,2011:46-51.
[30]MASOOD-UR-REHMAN M,FANG J C,SAFFIH F.Automatic star pattern recognition in tracking mode[C]//6thInternational Bhurban Conference on Applied Sciences and Technology.IEEE,2009:249-252.
[31]GRACIANO A B V,CESAR R M,BLOCH I.Graphbased object tracking using structural pattern recognition [C]//Brazilian Symposium on Computer Graphics and Image Processing.IEEE,2007:179-186.
[32]BADRI J,TILMANT C,LAVEST J M.Hybrid sensors calibration:application to pattern recognition and tracking [C]//IEEE International Symposium on Intelligent Signal Processing.IEEE,2007:1-5.
[33]王海鹏.多传感器编队目标跟踪算法研究[D].烟台:海军航空工程学院,2012:8-9. WANG HAIPENG.Research on multi-sensor formation targets tracking algorithm[D].Yantai:Naval Aeronautical andAstronautical University,2012:8-9.(in Chinese)
[34]WANG HAIPENG,JIA SHUYI,TANG TIANTIAN.The algorithm of the clutter and interference detection based on the image technique of the group segmentation[C]// The 2016 International Conference on Applied Mathematics,Simulation and Modelling.Beijing:Advances in Computer Science Research.2016:135-141.
Centralized Multi-Sensor Refined Tracking Algorithm within Targets Inside Cluster Based on Template Matching
WANG Haipeng,JIA Shuyi,LIN Xueyuan,TANG Tiantain
(Research Institute of Information Fusion,NAAU,Yantai Shandong 264001,China)
Aiming to solve the track refined tracking problem of the targets inside cluster with the multi-sensor detections,based on the relative invariant of the actual positons of the targets inside cluster in each detection period,a new algorithm named centralized multi-sensor refined tracking algorithm within targets inside cluster based on template matching was proposed.In the algorithm,the template shape matrix and the shape matrix to be matched were respectively obtained with the previous associated group state set and group measurement set.The least-cost matching matrix was obtained with the matching search model and the matching matrix validation rules.Moreover,based on the template and the corresponding matching matrix,the state update of each track within the targets inside cluster was completed with the Kalman filter.The analysis results of the simulation data showed that obvious advantages of this algorithm were esrablished in the aspects of tracking accuracy,real-time performance and effective tracking rate,compared with the multisensor multipled hypothesis algorithm based on data compressing technic which waqs a superior performance algorithm in the traditional multi-sensor multi-target tracking field.The real engineering requirement of the refined tracking of the targets inside cluster was met very well with this algorihtm.
template matching;multi-sensor;targets inside cluster;refined tracking
TP953;TN957
A
1673-1522(2016)04-0430-07
10.7682/j.issn.1673-1522.2016.04.005
2016-05-26;
2016-06-27
国家自然科学重点基金资助项目(61531020);国家自然科学面上基金资助项目(6147383)
王海鹏(1985-),男,讲师,博士。
猜你喜欢
中学生数理化·七年级数学人教版(2023年3期)2023-03-21 00:44:56
科学与信息化(2021年30期)2021-12-24 08:00:20
能源(2018年8期)2018-09-21 07:57:16
自动化学报(2017年2期)2017-04-04 05:14:28
电子测试(2017年23期)2017-04-04 05:07:46
中学生数理化·七年级数学人教版(2016年2期)2016-05-30 21:20:57
电气化铁道(2016年5期)2016-04-16 05:59:55
工业设计(2016年10期)2016-04-16 02:44:12
西北工业大学学报(2015年3期)2015-12-14 13:08:44
遥测遥控(2015年2期)2015-04-23 08:15:22
