
基于双PID的风板控制系统的设计与实现
2016-10-09 08:37:05田德永
电子测试 2016年18期
田德永
(贵州职业技术学院信息工程学院,贵州贵阳,550024)
基于双PID的风板控制系统的设计与实现
田德永
(贵州职业技术学院信息工程学院,贵州贵阳,550024)
设计了一种风板控制系统,该系统采用增量式双PID算法,采用STC单片机作为控制核心,用重力加速度传感器实时采集风板角度,利用单片机的PWM信号调节风机速度,控制风板运动轨迹,最终使风板平稳达到规定的动作。
风板控制; PWM;双PID
0 引言
本设计源于2015 年全国大学生电子设计大赛高职组控制类题目,要求设计并制作一种风板控制系统,通过控制风机的风速来控制风板完成规定动作,并能发出相应的声光提示。风板具体动作要求,可参考竞赛题目《风板控制装置》。
1 系统方案的设计
本系统采以控制模块为核心,运用双PID算法,并利用控制模块产生两路PWM信号,提供给两个风机驱动模块。辅助电路由角度测量模块、按键模块、显示模块、左右风机驱动模块、声光提示模块等组成。通过按键的操作设定风板的预置角度和预设规定的动作,控制模块通过角度传感器实时获取风板角度,进行PID算法后并调整PWM信号的占空比,实现对风机转速控制,并将风板角度显示模块上。控制系统方案框图如图1所示。
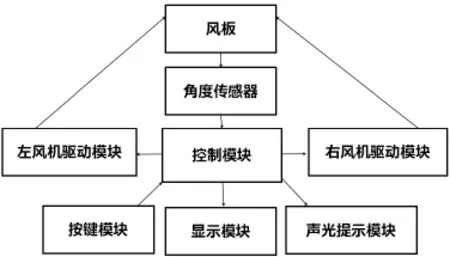
图1 系统方案框图
2 系统硬件电路的实现
2.1控制模块的选择
现在流行的控制器有ARM、STM32、51单片机系列,ARM、 STM32运行速度快,且运行资源比较多,可进行复杂的运算,但价格比较贵。而根据系统要求及本设计采取的方案,控制器主要的是进行PID算法的运算以及输出PWM控制,不需要进行更复杂的运算,因此从性价比角度看,控制模块采用51单片机即可。本设计中采用宏晶公司的STC15F2K61S2单片机作为控制模块。STC15F2K61S2属于增强型51单片机,速度比普通8051快8~12倍,具有8通道10位高速A/D,3路PWM。
2.2驱动模块
风机驱动采用L298N 芯片控制。L298N是SGS公司出产的4通道逻辑驱动电路芯片,该芯片是专用的电机驱动芯片,其内部含有H 桥的高电压、大电流全桥驱动器,可以用来驱动两个直流电机,或一个两相步进电机,采用标准逻辑电平控制,具有两个使能控制端,在不受输入信号影响下允许或禁止。其中4脚接电源电压,电压范围为+2.5~46 V,最大工作电流2.5A,额定功率25W,可驱动电感性负载。
2.3 角度传感器模块
角度传感器可采用旋转编码器、变阻器式角位移传感器、及加速度传感器等。旋转编码器精度高、安装工艺复杂,且容易受震动影响,需要进行滤波处理。变阻式角位移传感器原理简单,它是将角度变化量的测量变为电阻变化量的测量,但是精度不高,且容易烧坏。本设计采用ADX335型号的角度传感器,它是低功耗及单一的IC芯片加速度传感器,质量比较轻巧,容易和风板轴衔接,经过适当算法后,可得到比较高精度的角度。其电压在1.8V至3.6V之间,在-55°C 到125°C温度范围内,采用5×5×2 mm的LCC的封装。
2.4 按键输入及显示模块
按键可采用4×4矩阵模块和独立按键方式。考虑到需要输入的量不是很多,且采用的单片机也有足够的端口可供使用,所以采用了独立的按键方式。在进行防抖处理后,在软件设计时比较容易获得按键的值。显示模块采用常用的LCD1602液晶模块,它能显示32个字符,使用方便,基本能地满足系统需要显示信息的要求。
3 控制算法的设计及实现
本控制系统的设计的核心是控制算法的设计和实现。由于在风板控制系统中的被控对象具时变不确定性、纯滞后等特征,采用了PID控制算法。通过对检测到的角度进行PID运算,控制PWM占空比而控制风机的速度,而使风板能稳定达到任意预置角度。
3.1PWM及风力的控制
显而易见,风力的大小,由风机转速决定。转速越大,则风力越大。调节风力,就是调节风机的转速。直流调速系统中,都是以变压调速来实现的。其中,在变压调速系统中,大体上又可分为可控整流式调速系统和直流脉宽调制(PWM)调速系统两种。PWM控制技术中,要改变等效直流电压的大小,可以通过改变脉冲幅度和占空比来实现,因为在实际系统设计中脉冲幅度一般是恒定的,所以通常通过控制占空比的大小实现等效直流电压调节,从而达到利用PWM控制技术实现对直流风机转速进行调节的目的。本设计中,充分利用控制模块STC单片机能产生PWM信号功能,使用其中自带的两路PWM对风机进行速度的调节。对两边风机速度的控制和调节,即是对输出的PWM占空比的控制。占空比又由风板的角度进行数字PID算法实现,从而达到控制风板运动的轨迹。
3.2PID控制算法
3.2.1位置式数字PID算法。该控制算法提供了执行机构的具体位置,输出公式为:

由此可见,该PID输出与整个过去的状态有关,这种算法每次输出均与过去的状态有关,计算时要对e(k)进行累加,容易产生大的累加误差,且造成积分饱和,控制器运算量很大。
3.2.2增量式数字PID算法。该PID输出只是控制量的增量Δu(k)。输出表达式为:

可见,采用增量式算法时,控制量Δu(k)对应的是本次执行机构位置的增量,而不是对应执行机构的实际位置,算式中不需要累加。控制增量Δu(k)的确定仅与最近3次的采样值有关,容易通过加权处理获得比较好的控制效果,因此,本设计中,采用增量式PID算法。
3.2.3双PID控制。双PID常常采取串级PID控制,串级PID原理如图2所示。
串级控制系统具有主、副两个控制回路,从信号的传递方式来看,主、副控制器是串联地进行工作,主回路的输出是通过副回路起作用;从回路闭合方向来看,副回路被包括在主回路中,可以看成一个具有精确跟踪能力的控制环节,它以主回路的输出作为自己的输入,并始终跟随其变化而变化,即:主回路为定值控制,副回路为随动控制,这就是串级控制系统的最重要的特征。在本设计中,主PID是对风板实际角度进行PID运算,副PID主要是对从风板右边看去的角度进行PID运算。由于加速度传感器获得并不是直接角度,需要经过单片机进行算法运算,算出角度。具体控制原理图如图3所示。
3.2.4PID参数的整定。
所谓PID 参数的整定,就是按照已定的控制方案,求取使控制质量最好时的PID 参数值,确定最合适的控制器比例度P、积分时间Ti 和微分时间Td 。PID参数的整定方法工程上最常用的有临界比例度法、衰减曲线法和经验凑试法。本设计中,采用试凑法。试凑法就是根据控制器各参数对系统性能的影响程度,边观察系统的运行,边修改参数,直到满意为止。在试凑时,一般可根据以上参数对控制过程的影响趋势,对参数实行先比例、后积分、再微分的步骤进行整定。在采用双PID中,先整定内环PID,再整定外环PID。
3.3控制系统预定动作的实现
参数整定好之后,风板基本达到预设的任意期望的角度。这为后面的风板的动作打好基础。风板第一个动作要求是由起点开始启动装置,控制风板达到预置角度,过渡过程时间不大于10s,在预置角度上的稳定停留时间为5s,动作完成后风板平稳停留在终点位置。完成这一动作,实际上只要调节期望角度。起点时,期望角为0度,终点时,期望角为180度。期望角随时间变化

图2 串级PID
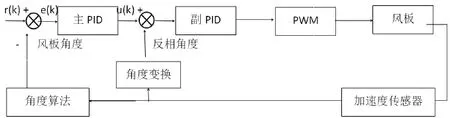
图3 控制原理
用坐标图如图4所示。期望角按图变化,便能基本实现第一个动作。Θ(t)表示期望角,θ即预定停留角度,其中,t1<10s,t2-t1=5s。同理,风板的第二个动作,也是控制期望角变化而实现的,其变化如图5所示。

图 4 动作一角度的变化图
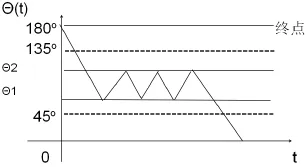
图5 动作二角度的变化图
4 结束语
风板的控制,其核心还是在控制算法上。在算法上还可以采取模糊算法,自适应算法等。本设计采用了双PID控制算法,不需要复杂的编程就容易实现,且比较精准,能达到预设的动作。难点是PID参数的整定,本设计采用了试凑法进行PID的整定,需反复修改参数。为了减少工作复杂度,可进一步优化算法,采取自整方法来实现。
[1]李莉,曹红英.基于单片机的风板控制装置设计与实现[J].工业控制计算机,2016,29(3):143-144
[2]雷慧杰.基于STM32的直流电机PID调速系统设计[J].现代电子技术,2016,39(8):165-167
[3]李强,张灵.双PID 控制在煤气鼓风机压力调节中的应用[J].山西煤炭,2015,35(1):76-78
[4]刘二林,姜香菊.基于双PID的旋转倒立摆控制系统设计与实现[J].制造业自动化,2015,37(3):139-140
[5]常建东,虎恩典,赵文贤等.基于PID参数自整定的液位控制系统设计及其实现[J].现代电子技术,2016,39(5):252-253
[6]晗悦,丁嘉毅等.基于PID及PWM的无线传能系统研究[J].新型工业化,2014,4(9):56-61
田德永(1978.09-)男,贵州天柱人,硕士研究生,高级实验师,研究方向:控制与测量。
Design and Implementation of Wind Board Control System Based on Dual PID
Tian Deyong
(Guizhou Vocational and Technical Institute,Guizhou Guiyang,550024)
A kind of wind board control system was designed.The incremental dual PID was used in the control system which the STC MCU was taken as control core.The gravity acceleration sensor is used to collect the angle of the wind board in real time and the PWM signal generated with the MCU is used to adjust the speed of the fan which can control the movement of the wind board.the system makes the wind board meet the conditions which are required.
wind board control;PWM;dual PID
猜你喜欢
节能与环保(2022年2期)2022-03-16 10:42:58
新疆农机化(2020年3期)2020-07-02 07:11:06
时代汽车(2018年8期)2018-06-18 08:59:38
能源(2018年5期)2018-06-15 08:56:02
制造技术与机床(2017年6期)2018-01-19 02:41:07
能源(2017年9期)2017-10-18 00:48:27
现代工业经济和信息化(2016年12期)2016-05-17 05:37:47
安徽冶金科技职业学院学报(2015年3期)2015-12-02 03:46:38
电源技术(2015年9期)2015-06-05 09:36:06
化工科技(2014年4期)2014-06-09 02:18:35
