
深海潜标布放运动与定深控制策略研究
2016-10-09 03:17葛德宏高大远王光辉海军潜艇学院山东青岛26699中国人民解放军92267部队山东青岛26602
舰船科学技术 2016年7期
葛德宏,朱 海,高大远,王光辉(.海军潜艇学院,山东 青岛 26699;2.中国人民解放军92267部队,山东 青岛 26602)
深海潜标布放运动与定深控制策略研究
葛德宏1,2,朱海1,高大远1,王光辉1
(1.海军潜艇学院,山东 青岛 266199;2.中国人民解放军92267部队,山东 青岛 266102)
深海潜标是一种海洋环境监测平台,具有多元化的海洋科学研究能力。本文针对一种可实现自动分离、锚泊的一体化潜标,开展布放运动与定深控制研究。建立潜标水中整体和分离运动的模型,其中考虑了刹车的过渡过程;提出 bang-bang 控制定深策略。仿真结果表明,潜标分离后可以自动布放至海底锚泊,同时将上段平台定深至某一深度。
深海潜标;布放;运动仿真;定深控制
0 引 言
深海潜标是一种海洋环境监测平台,可根据需求搭载不同的监测设备和仪器来测量海流、水温、电导率、声速、密度等参数,具有多元化的海洋科学、环境研究的价值和能力[1-3]。目前,国内外的深海潜标多采用单点绷紧式系留系统,即将探测设备串接在系留索上,并在每个探测设备上方配置玻璃球组以确保探测姿态。由于玻璃球多且分散,导致潜标布放方法复杂,时间长[4-5]。研究可实现自动分离、锚泊的一体化潜标是未来重要的发展方向。该类潜标采用顶端浮力实现系留姿态稳定,布放方法简单,可自动定深。本文对一体化潜标在水中垂直平面的运动进行分析,研究基于 bang-bang 控制的自动定深策略,为样机研制提供理论指导和技术支撑。
1 潜标布放概述
1)初始状态。浮筒与刹车装置和储索筒为一个整体(浮筒段),锚为一个整体(锚段),两段由连接分离机构连接。浮筒段具有正浮力,锚段具有负浮力,刹车装置锁紧,缆索不能从储索筒中抽出。
2)目的。因为浮筒段耐压不超过 330m,同时为保证布放的安全性,要求浮筒段布放后震荡深度不能浅于 80m。则通过调整缆索拉力,在锚着底之前保证浮筒段在该深度范围内运动,锚着底后,最终将浮筒段定深在 200m 深度进行海洋测量,见图2。

图1 一体化深海潜标示意图Fig.1 The diagrammatic sketch of submerged buoy
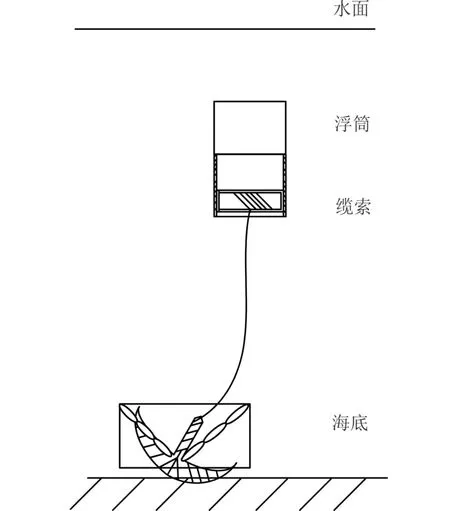
图2 布放定深最终状态图Fig.2 Final state diagram of laying and depth control
3)运动过程。深海潜标布放入水中,整体下沉到一定深度后,刹车装置松开,分离机构动作将浮筒段和锚段分开,则在锚的负浮力和浮筒的正浮力的作用下,缆索被从储索筒中抽出,锚下沉,浮筒上浮。在浮筒段达到需要控制的深度时,刹车装置刹车,停止放索,使锚和浮筒继续以一个整体下沉,下沉一段时间到达浮筒深度限制下限后,可以逐步松开刹车继续放缆索,浮筒上浮,锚段继续下沉。整个过程往复,达到将消耗时间使锚着底的目的。
2 布放运动建模
2.1基本假设
1)布放过程中,缆索无伸长,且缆索不断线。实际过程中应该在分离、刹车、锚着底等时机使用制动器滑差放索缓冲,以防止缆索断开;
2)海流为水平流向,不影响布放定深过程;
3)潜标由水面船布放于水中,分析运动从布放时潜标竖直且速度为 0 开始,该假设对潜标运动及控制定深不产生实质影响。
2.2两段自由运动受力分析
1.《秀才胡同》的种种典故不是简单的叠加,是虽未看破红尘却无可奈何终于抛却所有的悲凉入骨;而《东风破》却是将本就破碎的东西进行缝补,以修辞为针线,典故为布料进行创作,让歌曲充斥看破一切但心却仍会为往事所动的苍茫惆怅之感。《秀才胡同》中如“沽酒当垆”、“人比黄花瘦”等典故无疑完整使用了典故本身完整的氛围,多个典故的氛围累加,形成复杂而统一的感觉;而《东风破》用典则是通过关键词如“古道”、“孤灯”等典故的片段来交织成完整的情绪。
对浮筒段在水中自由运动时的受力情况进行分析,如图3所示,F1为缆索拉力,R1为流体阻力,W1为浮力,G1为重力。无论是浮筒段还是锚段的受力状态基本相同,区别仅在部分力的方向上,下部锚段不单独分析。

图3 浮筒段自由运动时受力分析Fig.3 Stress analysis of free movement of submerged buoy
海水阻力为:

式中:CD为浮筒或锚段阻力系数[6],取 CD=1.2;ρ为流体密度;Vs为竖直方向上浮筒相对流体的速度;A1为迎流面积。
潜标布放时,浮筒在海水中竖直运动,由于海水粘性力的作用,产生一部分的附加质量,该附加质量的估算公式为[6]:

式中:L,B,H 分别为平台的长、宽、高,K为附加质量系数,查表[2]为 0.02。
假设浮筒段向下运动速度向下为正,可得下式

将式(1)代入式(2),整理可得:

其中,质量m1随着放缆而发生变化,如下式:

式中:m为浮筒段与缆总质量;Lf为放缆长度;Ll为缆索总长;ml为缆索总质量。
2.3两段整体运动受力
当刹车装置刹车后,浮筒段和锚段成为一个整体运动,平衡态时,具体受力分析如图4所示。

图4 潜标整体运动受力分析Fig.4 The force analysis of the overall movement of submerged buoy
可得:

得出整体运动时的下降速度 Vz,由该速度可得出阻尼力大小。
2.4刹车瞬间运动分析
假设浮筒段和锚段均自由运动至恒定速度后进行刹车,即刹车前处于受力平衡状态,刹车时过渡时间较短,则刹车瞬间上段和下段可以看做是一个碰撞过程,满足动量守恒定律:

此后整体受力为:

式中:mf和 Gf为已放缆索的水中质量与重量,该过程持续到 V3与第2阶段整体平衡段速度 Vz相等,因缆索直径很小,忽略其附加质量。
3 定深控制
考虑到刹车装置的最小工作时间,为避免刹车装置处于刹车与松开频繁交替工作状态,将定深过程分为2段,即前期粗控段、着底前控制段。前期粗控段主要目的是通过在定深线附近震荡消耗时间,以达到放缆索及锚段下沉的目的,使用深度量测进行定深 bangbang 控制[7-9]。
浮筒段装有深度计,锚段装有高度计,通过量测浮筒段深度进行定深控制,通过高度计测量锚段距离海底的距离确定开始着底段控制的时机。
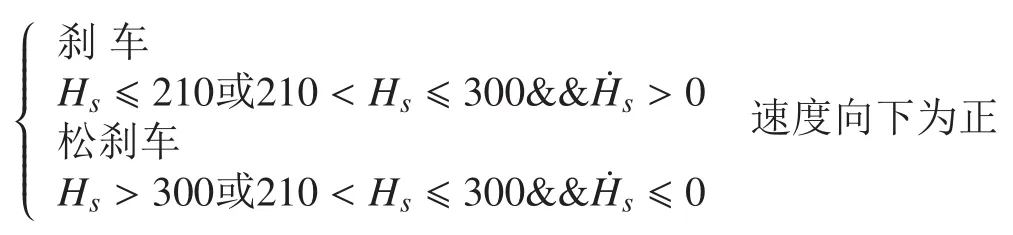
根据需要,潜标布放区域 4 000m 水深,要求锚着底;浮筒段定深在水下 200m 深度。从制造成本考虑,浮筒段最大耐压深度约为 330m;而从安全性考虑,浮筒的深度不得小于 80m。因此在锚段下沉过程中,浮筒的深度应该在 80~330m之间,最终定深 200m。考虑需保留一定的余量,确定 bang-bang 控制策略为:
粗控段:

因为浮筒段震荡幅值为 200m,因此确定进行锚着底段控制的时机为锚段高度计测量距离海底小于或等于 200m 时,即当锚下降到 3 800m 深度时开始。
此时应保证锚着底后,浮筒段处于 200m 水深以下,因此调整刹车深度控制值
锚着底后,因浮筒段仍处于 200m以下,松开刹车,至 200m 深度刹停。此后,如浮筒段在流的作用下产生沉降,则以锚着底控制方式将其定深在 200m。
4 仿真分析
仿真条件:缆索 4 000m,缆索水中重 48kg,上、下段平台为直径 400mm的圆柱,上段长 3.5m,质量 350kg,浮力 50kg;下段长 1.5m,质量 600kg,浮力 80kg。
图5~图7分别为潜标布放运动及定深控制仿真图,显示了布放、定深震荡粗控和锚着底控制时浮筒段和锚段的速度、深度和加速度变化历程。第1阶段是布放开始,初始下沉速度为 0,浮筒和锚整体下沉到 300m,其速度经历了短暂的加速过程后达到平衡;第2阶段为松开缆索自由运动时期,浮筒和锚具有相同的初速度与深度,此后自由运动到各自的平衡状态,即浮筒段在正浮力的作用下达到向上的匀速运动,锚段在负浮力的作用下向下匀速运动;至浮筒段上升到水下 100m为止;第3阶段经历自由平衡状态、刹车至整体运动的平衡状态,下沉到 300m。在锚着底控制前保持 2、3阶段重复运动。第4阶段为锚着底控制段,转换控制方式。可见潜标分离后可以自动布放至海底锚泊,同时将浮筒段定深至 200m。

图5 布放及定深控制过程平台运动速度变化Fig.5 Speed dynamic change of submerged buoy on depth control process

图6 布放及定深控制过程平台深度变化Fig.6 Depth dynamic change of submerged buoy on depth control process

图7 布放过程上段平台运动加速度变化Fig.7 Acceleration dynamic change of upper platform on laying process
5 结 语
本文对深海潜标布放运动和定深控制技术进行仿真研究。首先,建立了布放过程中浮筒段和锚段水中整体和分离运动的模型,其中考虑了刹车的过渡过程;其次,提出了bang-bang 控制定深方法,并完成仿真。结果表明,系统分离后可以自动布放至海底锚泊,同时将浮筒段定深至某一深度。下一步将开展布放定深试验,为样机研制提供技术支撑。
[1]方书甲.海洋环境监测是海洋发展和维权的支撑[J].舰船科学技术,2012,34(2):3-10.FANG Shu-jia.Marine environment monitoring:essential to marine development and rights guarding[J].Ship science and Technology,2012,34(2):3-10.
[2]梁炎.海底网络中心战传感器网络[J].舰船科学技术,2006,28(1):109-112.LIANG Yan.Undersea sensor network for network-centric warfare[J].Ship Science and Technology,2006,28(1):109-112.
[3]EROL-KANTARCI M,MOUFTAH H T,OKTUG S.A survey of architectures and localization techniques for underwater acoustic sensor networks[J].IEEE Communications Surveys & Tutorials,2011,13(3):487-502.
[4]EROL-KANTARCI M,MOUFTAH H T,OKTUG S.Localization techniques for underwater acoustic sensor networks[J].IEEE Communications Magazine,2010,48(12):152-158.
[5]谷军.多浮标集装式深海信息传输平台系统技术[J].舰船科学技术,2009,31(1):112-116.GU Jun.Multi-buoy containerization type deep sea intelligence transmission platform system technology[J].Ship Science and Technology,2009,31(1):112-116.
[6]施生达.潜艇操纵性[M].北京:国防工业出版社,1995.
[7]HUANG S.Stability analysis of the heave motion of marine cable-body systems[J].Ocean Engineering,1999,26(2):531-546.
[8]GOBAT J I,GROSENBAUGH M A.Time-domain numerical simulation of ocean cable structures[J].Ocean Engineering,2006,33(10):1373-1400.
[9]吴永海.全方位移动机器人运动控制及其规划[D].杭州:浙江大学,2011.
Research on laying motion simulation and depth control of deep-sea submerged buoy
GE De-hong1,2,ZHU Hai1,GAO Da-yuan1,WANG Guang-hui1
(1.Navy Submarine Academy,Qingdao 266199,China;2.No.92267 Unit of PLA,Qingdao 266102,China)
The submerged buoy is a kind of platform for ocean/marine environment survey; it can be used for sea scientific research.The laying method of common submerged buoy is complicated and time-consuming.Aiming at a incorporate submerged buoy which can separate and moor automatically,this paper study the laying motion and depth control of platform.Firstly,the model of motion is established considering the transition process.Secondly,the bang-bang control method of depth control is presented and simulation has been completed.The result of simulation shows that the submerged buoy can separate and moor automatically and control the upper platform to appointed deep.
submerged buoy;laying;motion simulation;depth control
U661.33;TP273
A
1672-7619(2016)07-0087-04
10.3404/j.issn.1672-7619.2016.07.019
2015-12-14;
2016-03-04
中国博士后科学基金资助项目(2014M552660)
葛德宏(1977-),男,博士后,工程师,从事船舶与海洋结构物运动控制与导航相关研究。
猜你喜欢
建材发展导向(2022年12期)2022-08-19
中学生数理化·八年级物理人教版(2022年5期)2022-06-05
中学生数理化·八年级物理人教版(2022年5期)2022-06-05
中学生数理化·八年级物理人教版(2022年5期)2022-06-05
房地产导刊(2022年4期)2022-04-19
中国公路(2022年3期)2022-04-13
建材发展导向(2021年18期)2021-11-05
中国新技术新产品(2021年2期)2021-04-13
中国航海(2018年1期)2018-05-07
船海工程(2018年1期)2018-03-01
