
基于旋转坐标系方法的潜艇旋臂试验数值模拟
2016-10-09 03:16戴余良蒋竞超陈志法朱增辉海军工程大学湖北武汉430033中国人民解放军639部队福建漳州363000
舰船科学技术 2016年7期
邓 峰,戴余良,蒋竞超,陈志法,朱增辉(.海军工程大学,湖北 武汉 430033;.中国人民解放军639部队,福建 漳州 363000)
基于旋转坐标系方法的潜艇旋臂试验数值模拟
邓峰1,戴余良1,蒋竞超1,陈志法2,朱增辉1
(1.海军工程大学,湖北 武汉 430033;2.中国人民解放军61139部队,福建 漳州 363000)
潜艇水动力系数对其水动力性能研究具有重要意义。为了获取潜艇旋转导数,本文以结构化网格为背景,采用旋转坐标系方法将潜艇旋臂试验数值模拟转化为定常问题,对Suboff裸艇与全附体在 2 种不同的湍流模型下进行数值仿真,并与试验数据对比,发现仿真结果与实际较为相符,其中标准 k-ω的仿真结果总体优于 RNG kω,表明方法可行且拥有较高计算效率。本研究对获取潜艇旋转导数有一定参考价值。
潜艇;旋转坐标系;数值计算;湍流模型
0 引 言
潜艇是海军重要的作战装备,其水动力系数的获取对潜艇水动力性能等方面的研究具有重要价值,特别是现在艇型设计更多依靠母型改进,其意义愈显重大。近年来,随着计算机技术的迅速发展和普及,计算流体力学(computational fluid dynamics,CFD)技术广泛运用于流场数值模拟,其良好的适应性和较高的精度,逐渐成为流体力学研究的有力工具,也成为潜艇水动力研究的重要途径。
文献[1-4]对潜艇定常计算进行研究,分析了网格数量、壁面 Y+、湍流模型对计算精度的影响,对指导潜艇旋臂试验的数值模拟有积极作用。国内运用数值计算方法对潜艇回转运动进行模拟较少,肖昌润等[5]选取基于固定坐标系的动网格方法对 SUBOFF的旋转导数进行预报,计算结果满足工程要求;刘帅等[6]以结构网格为计算背景,采用添加动量源项的方法将旋臂试验转化为定常问题进行求解,从而取得了良好的结果;王骁等[7]采用分区混合网格结合滑移网格方法,解决了船体圆运动及螺旋桨定轴转动的叠合难题;黄成涛[8]则采用 RANS 方程,着重对浅水中定常回转运动船舶粘性流场及水动力进行数值模拟。林俊兴等[9]通过潜艇水下回转运动特征参数的计算对模型和算法进行验证,并根据计算结果分析潜艇定常回转运动特征。胡志强等[10]提出一套水下机器人粘性类水动力的数值计算方法,采用标准 k-ω 湍流模型计算旋转力系数,计算表明该方法能够满足水下机器人方案设计阶段的预报和仿真需求。
本文以 Suboff 裸艇体和全附体为研究对象,利用网格生成软件 ICEM CFD 生成结构网格,分别选取RNG k-ε和标准 k-ω 2 种不同湍流模型,采用旋转坐标系方法通过 CFD 商业软件 Fluent 对潜艇旋臂试验进行数值模拟,求取不同模型下的旋转导数并对比试验数据[11],发现仿真结果较为符合,且拥有较高的计算效率,表明计算可行,本研究对获取潜艇旋转导数有一定参考价值。
1 坐标转换与数值方法
1.1坐标转换
为了将旋臂试验这一非定常问题转换为定常问题求解,需要将绝对速度下的N-S 方程转化为相对速度下的N-S 方程。N-S 方程可以表示为:

式中:ρ为密度;t为时间;U为绝对速度矢量;f为微元体体积力;p为压力;δ为单位矩阵;μ为动力粘度。
根据速度合成定理,将绝对速度 U 分解为相对速度 Ur和牵连速度 Ue,即 U=Ur+Ue,Ur=[u,v,w]T。在旋转坐标系下,为坐标系平动速度,为坐标系转动速度,为动点相对于动坐标系原点的位矢。分别对 Ur和 Ue求导:
牵连速度 Ue只是时间的函数,所以式(4)简化为:

1.2湍流模型
控制方程采用时均的连续方程和 N-S 方程,并且采用湍流模型 RNG k-ε和标准 k-ε 使控制方程封闭,借以考察 2 种模型对潜艇旋臂试验数值仿真精度。下面给出 2 种模型的数学表达式,详细推导过程和各参数选取可参考文献[12]。
1)RNG k-ε 模型
湍动能 k 方程:

湍耗散率 ε 方程:

2)标准 k-ω 模型
湍动能 k 方程:

特殊耗散率 ω 方程:

1.3数值计算方法
以上 2 种模型均采用有限体积法(FVM)对控制方程和湍流模型进行离散,压力速度耦合迭代采用SIMPLEC 算法,动量方程、湍流动能方程、耗散率方程采用二阶迎风格式,考虑计算收敛性,采用欠松弛技术,速度欠松弛因子、湍动能松弛因子、特殊耗散率松弛因子均取 0.3,其他默认。残差收敛均取为0.000 1。
2 模拟模型与网格划分
2.1模拟对象
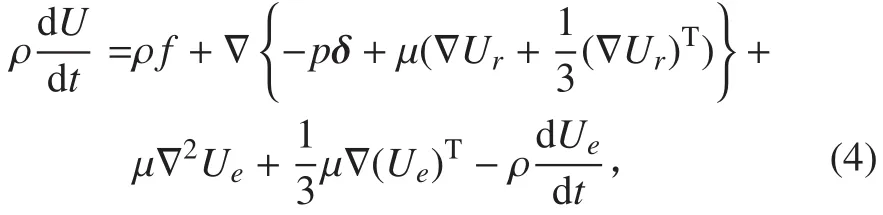
以 Suboff AFF-8 潜艇模型为数值模拟对象,模型主尺度 L=4.356m,其中前体长 1.016m,平行中体长2.229m,后体长 1.111m,最大直径为 0.508m,裸艇为去除围壳和十字舵的主艇体部分,模型如图1所示。
2.2边界条件
本文 2 种计算下边界条件相同,计算域为一包裹潜艇的圆环,最外半径为 26m,最内半径为 10m,艇体力矩中心与文献[11]一致。域内流体为不可压缩水介质,不考虑重力,计算域模型和边界条件如图2所示。
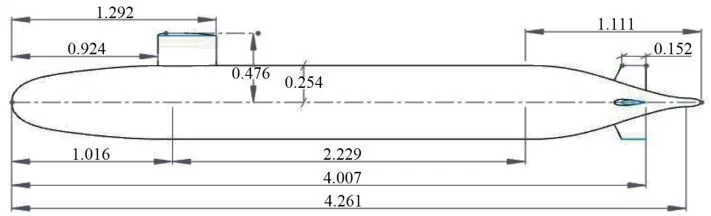
图1 Suboff AFF-8 潜艇模型Fig.1 Submarine model of Suboff AFF-8
图2 计算域模型(a)和边界条件(b)示意图Fig.2 Computational domain model(a)and the boundary conditions(b)
环形流场壁面设置为静止壁面边界,其他默认;潜艇壁面设置为随区域运动的壁面边界,旋转中心为(0,0,0),旋转轴为(0,0,1),相对于临近网格单元静止。
2.3网格划分
结构网格能够节省大量的内存空间,拥有更高的计算效率,本文采用分块网格技术划分结构网格。运用商业网格划分软件 ICEM CFD 对潜艇外流场进行网格划分,其中,裸艇网格数量为 45 万,全附体网格数量为 150 万,划分方法类似。仅以裸艇体网格划分为例:由 2 D Planar 旋转拉伸为 10个块,每个块旋转角度为 36°。全局缩放因子选 1,在全局单元尺寸为 1的基础上对局部进行加密。潜艇周围划分外 O-Block,以便边界层处理,边界层内单元增长率为 1∶1.1;边界层到流场边界单元增长率为 1∶1.2,在其他地方采用H 型网格,确保网格质量在 0.6以上。边界层内节点数设为 31,第1层网格高度为 0.1mm,使壁面 Y+值在30 左右,选用标准壁面函数;边界层到边界节点数设为 25,艇首部节点数设置为 26,艇尾部节点数为 31,对应与弧度部分特殊加密,平行中体处节点数为 46。网格划分结果如图3所示。
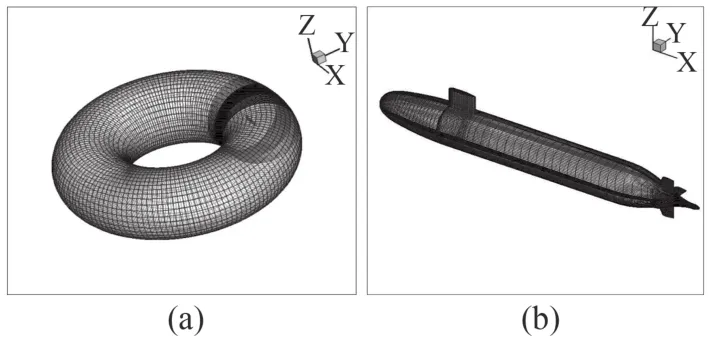
图3 流场网格(a)和全附体潜艇表面网格(b)示意图Fig.3 Grids of the flow field(a)and the surface of fully enclosed submarine(b)
3 计算结果与分析
水动力系数为无因次化结果,力和力矩旋转导数无因次化表达式为:

式中:ρ为液态水密度,ρ=998;V为潜艇旋转线速度;L为潜艇垂线间长,按文献[11]取 L=4.261m;Yr为 Y 向受力;Nr为 Z 轴力矩,力矩中心与文献一致,本文中为(0,18,0),整个计算区域设置为旋转坐标系,坐标系的旋转角速度 r 分别为0.1 rad/s,0.2 rad/s,0.3 rad/s,0.4 rad/s,0.5 rad/s。以裸艇在标准 k-ω模型下计算结果为例,图4分别为流场 Z=0 切面(角速度为 0.2 rad/s 时)的速度云图和压力云图,其中速度云图单位为m/s,压力云图单位为 Pa。从图中可看出速度、压力分布与半径呈线性关系。图5为裸艇和全附体潜艇周围流场速度云图,从图中可看到潜艇尾流迹,与事实相符。

图4 流场 Z=0 切面速度云图(a)和压力云图(b)Fig.4 Velocity cloud picture(a)and pressure cloud picture(b)when Z=0
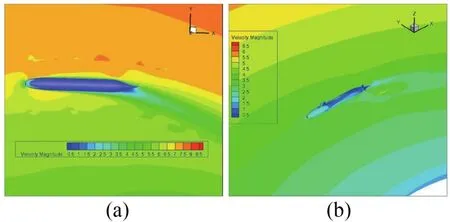
图5 裸艇(a)和全附体潜艇(b)周围流场速度云图Fig.5 Velocity cloud picture around purified submarine(a)and fully enclosed submarine(b)
在同一艇型和湍流模型下,得到不同角速度的力与力矩值,将其无因次化后,通过 Matlab 三次样条曲线进行拟合,得到拟合方程后求其在 r=0处斜率即为所求水动力系数。图6为裸艇在标准 k-ω 湍流模型下角速度 r(rad/s)分别与横向力旋转导数 Yr'、转首力矩旋转导数 Nr'的拟合曲线,其他拟合结果以表格给出。表1为裸艇拟合结果与试验结果对比,表2为全附体潜艇拟合结果与试验结果对比。
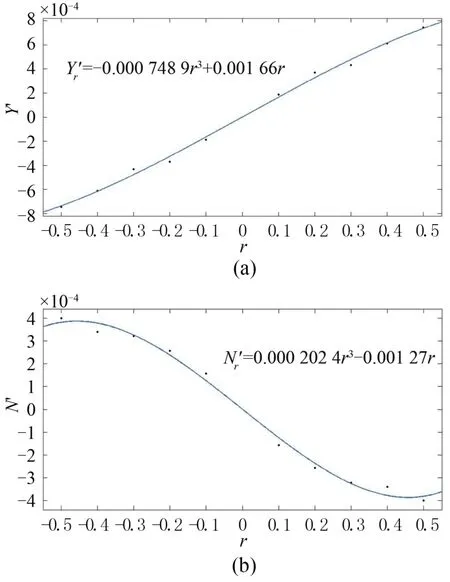
图6 横向力旋转导数(a)和转首力矩旋转导数(b)拟合曲线Fig.6 Curve graph of lateral rotary derivative and yawing moment rotary derivative
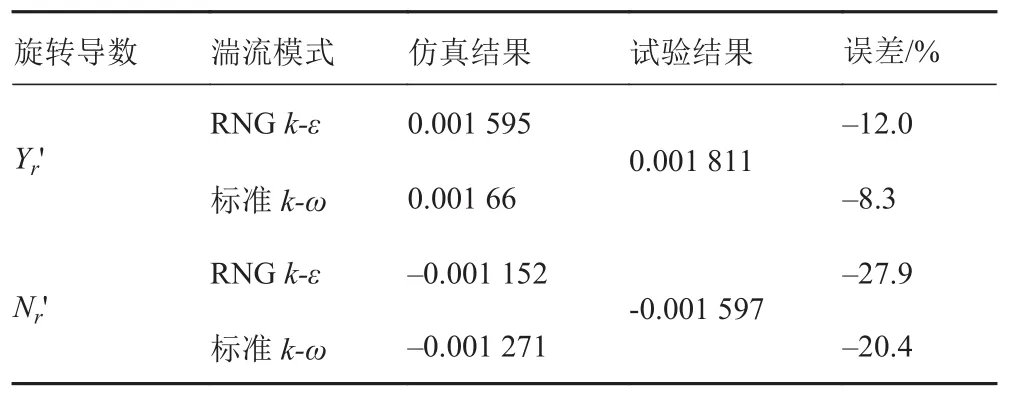
表1 裸艇拟合结果与试验结果对比Tab.1 Comparison between simulations and experiments in purified submarine
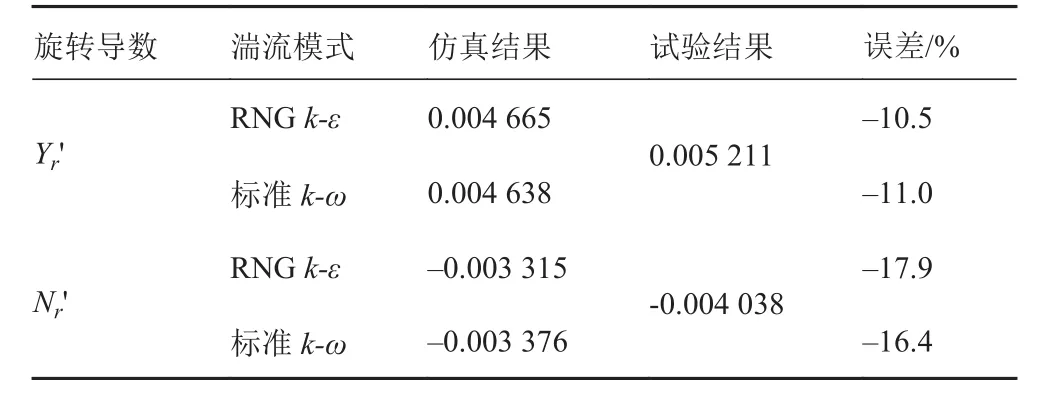
表2 全附体潜艇拟合结果与试验结果对比Tab.2 Comparison between simulations and experiments in fully enclosed submarine
从表中可看出,旋转坐标系方法对横向力旋转导数 Yr'的计算结果明显好于转首力矩旋转导数 Nr',这是因为旋臂试验中潜艇每一点的速度大小和方向都应确定,而数值模拟却与潜艇位置相关,这会造成 Nr'误差较大,这也是此方法的局限之一,对仿真结果总结如下:
1)在对裸艇和全附体潜艇的计算模拟中,标准 kω 模型精度要高于 RNG k-ε 模型,Yr'的精度能够达到工程要求;
2)计算用时较短(单个计算用时不足 2h),计算效率高于文献[5]的滑移网格,在精度要求不高的情况下,对旋转导数的模拟能够较好的预测其趋势,体现了基于旋转坐标系方法的优势。
4 结 语
本文通过 Suboff 裸艇与全附体在 2 种湍流模型下,运用旋转坐标系方法对其旋转导数进行仿真模拟,并与试验数据相比,验证了该方法的可行性。标准的仿真结果总体好于 RNG,在精度要求不高的情况下,该方法具有较高的计算效率。本文的研究内容对潜艇旋转导数求取有一定参考价值。
[1]王超,郑小龙,李亮,等.Y+值对潜艇流场大涡模拟计算精度的影响[J].华中科技大学学报(自然科学版),2015,43(4):79-83.WANG Chao,ZHENG Xiao-long,LI Liang,et al.Influence of Y+ on the calculation of submarine flow field characteristics of LES calculation accuracy[J].Journal of Huazhong University of Science and Technology (Natural Science Edition),2015,43(4):79-83.
[2]张楠,沈泓萃,姚惠之.潜艇阻力与流场的数值模拟与验证及艇型的数值优化研究[J].船舶力学,2005,9(1):1-13.ZHANG Nan,SHEN Hong-cui,Yao Hui-zhi.Validation of numerical simulation on resistance and flow field of submarine and numerical optimization of submarine hull form[J].Journal of Ship Mechanics,2005,9(1):1-13.
[3]潘子英,吴宝山,沈泓萃.CFD在潜艇操纵性水动力工程预报中的应用研究[J].船舶力学,2004,8(5):42-51.PAN Zi-ying,WU Bao-shan,SHEN Hong-cui.Research of CFD application in engineering estimation of submarine maneuverability hydrodynamic forces[J].Journal of Ship Mechanics,2004,8(5):42-51.
[4]涂海文,孙江龙.基于CFD的潜艇阻力及流场数值计算[J].舰船科学技术,2012,34(3):19-25.TU Hai-wen,SUN Jiang-long.Numerical analysis of resistance and flow field of submarine based on CFD[J].Ship Science and Technology,2012,34(3):19-25.
[5]肖昌润,刘瑞杰,许可,等.潜艇旋臂回转试验数值模拟[J].江苏科技大学学报(自然科学版),2014,28(4):313-316.XIAO Chang-run,LIU Rui-jie,XU Ke,et al.Simulation for submarine rotating-arm tests[J].Journal of Jiangsu University of Science and Technology (Natural Science Edition),2014,28(4):313-316.
[6]刘帅,葛彤,赵敏.基于源项法的潜艇旋臂试验模拟[J].大连海事大学学报,2011,37(2):1-4.LIU Shuai,GE Tong,ZHAO Min.Simulation for submarine rotating-arm test based on added momentum source method[J].Journal of Dalian Maritime University,2011,37(2):1-4.
[7]王骁,蔡烽,石爱国,等.双桨双舵舰船旋臂试验粘性流场数值模拟方法研究[J].船舶力学,2014,18(7):786-793.WANG Xiao,CAI Feng,SHI Ai-guo,et al.Numerical simulation of the viscous flow over the ship with twin-propellers and twin-rudders in rotating arm tests[J].Journal of Ship Mechanics,2014,18(7):786-793.
[8]黄成涛.浅水中作回转运动船体粘性绕流计算[D].武汉:华中科技大学,2007.HUANG Cheng-tao.Numerical calculate for viscous flow about a swirling ship in shallow water[D].Wuhan:Huazhong University of Science and Technology,2007.
[9]林俊兴,倪刚,戴余良,等.潜艇定常回转运动参数变化规律研究[J].舰船科学技术,2014,36(1):31-33,37.LIN Jun-xing,NI Gang,DAI Yu-liang,et al.Research on parameters' change rule of submarine's steady rotary movement[J].Ship Science and Technology,2014,36(1):31-33,37.
[10]胡志强,林扬,谷海涛.水下机器人粘性类水动力数值计算方法研究[J].机器人,2007,29(2):145-150.HU Zhi-qiang,LIN Yang,GU Hai-tao.On numerical computation of viscous hydrodynamics of unmanned underwater vehicle[J].Robot,2007,29(2):145-150.
[11]RODDY R F.Investigation of the stability and control characteristics of several configurations of the DARPA SUBOFF model (DTRC Model 5470)from captive-model experiments[R].Washington D.C:David Taylor Research Center,1990.
[12]王福军.计算流体动力学分析—CFD软件原理与应用[M].北京:清华大学出版社,2006.WANG Fu-jun.Computational fluid dynamics analysis-the theory and application of CFD software[M].Beijing:Tsinghua University Press,2006.
Numerical simulations of submarine rotating arms based on rotating coordinates
DENG Feng1,DAI Yu-liang1,JIANG Jing-chao1,CHEN Zhi-fa2,ZHU Zeng-hui1
(1.Naval University of Engineering,Wuhan 430033,China;2.No.61139 Unit of PLA,Zhangzhou 363000,China)
The hydrodynamic coefficients are significant for the hydrodynamic performance of submarine.In order to obtain the rotary derivative of submarine,structural grid and rotating coordinates were adopted to transfer the numerical simulation results of submarine rotating arms to a steady problem.Simulations based on SUBOFF submarine and fully enclosed submarine were performed in two different turbulent models,the results were pretty compatible with the fact.Among the two models,standard k-ω is more accurate than RNG k-ω.This method proved to be reasonable and efficient,which contributes significantly to the research on the rotary derivative of submarine.
submarine;rotating coordinates;numerical calculation;turbulence model
U661.3
A
1672-7619(2016)07- 0064-04
10.3404/j.issn.1672-7619.2016.07.014
2015-09-20;
2015-10-13
国家自然科学基金资助项目(51179196)
邓峰(1990-),男,硕士研究生,研究方向为潜艇操纵与运动仿真研究。
猜你喜欢
汽车实用技术(2022年19期)2022-10-19
导航定位学报(2022年2期)2022-04-11
中学生数理化(高中版.高二数学)(2021年4期)2021-07-20
数学大世界(2018年1期)2018-04-12
考试周刊(2018年15期)2018-01-21
中学生数理化·七年级数学人教版(2017年4期)2017-07-08
数学大世界·中旬刊(2017年3期)2017-05-14
高中生学习·高三版(2016年9期)2016-05-14
舰船科学技术(2016年1期)2016-02-27
汽车实用技术(2015年8期)2015-12-26
