
面向车辆状态信息广播的功率控制算法
2016-09-29 18:09徐哲鑫李世杰林潇吴怡
计算机应用 2016年8期
徐哲鑫 李世杰 林潇 吴怡
摘要:针对车载自组织网(VANET)中节点以固定功率发送信息导致的信道资源无法优化分配的问题,以车辆周期发送的状态信息的广播为研究对象,提出一种可自适应于车流密度变化的VANET功率控制算法。该算法通过定义功率控制周期构建并更新直接邻居列表,根据直接邻居车辆的位置来调整发射功率,进而控制节点的广播信息覆盖范围,实现信道资源的优化分配以及节点路由性能的优化。仿真结果验证了所提出算法的有效性,表明该算法能够有效根据车辆密度自适应调整发射功率、降低信道占用率并提高直接邻居数据包投递率,从而保证安全信息的有效传输。
关键词:功率控制;车辆状态信息;车载自组织网;直接邻居;周期广播
中图分类号:TN929.52
文献标志码:A
0引言
车载自组织网(Vehicular Ad-hoc NETwork, VANET)的应用非常广泛,主要可以分为三大类:交通安全、车辆调度和娱乐服务。但是,最开始研究和发展VANET的首要目的就是安全,也是最主要的目的。在安全方面的消息可分成两类:其一,车辆节点之间周期交互的车辆状态信息,如位置、速度和行驶方向等;其二,交通事故等突发情况下的紧急消息,使得车辆用户能够实时掌握周围驾驶环境的变化,发现潜在的危险因素,从而有效避免交通事故的发生。
无线通信中广播特性是天然属性,广播技术自然成为VANET传输安全信息的最主要方式之一。目前,VANET中的广播协议大都是从传统的移动自组织网络中发展而来的。在移动自组织网络中,节点的密集程度会对广播协议的性能造成重大影响:节点较为密集则会增加网络负载,而较为稀疏又会降低网络连通性[1]。而在VANET中,由于车辆节点本身的特点,在不同的情况下,节点的密集程度会发生较大的变化。因此,VANET中的广播协议设计,应该针对不同应用背景和节点的密集程度采用不同的策略,以获得较好的适应性和延展性。目前,国内外都还没有提出一个统一的方案来解决VANET在不同的车辆节点密集程度下的通信问题[2]。
在VANET中,广播信息的覆盖范围需要有选择性地进行调整,这可以通过调整车辆节点的发射功率来实现。对于功率控制的研究,在移动自组织网络中已经比较成熟,但绝大部分的功率控制研究都是以最优化节点能量、寻找能量消耗最少的路由和延长网络使用寿命等作为研究的主要目的。相比传统的移动自组织网络节点,VANET中车辆节点只要行驶就能得到能量补充,因此以上那些目的不再是VANET功率控制的主要目标,这就使得传统的功率控制方法并不适合于VANET。基于VANET的功率控制研究应该是以提高网络通信性能、使信息能够快速有效的传输为主要目标。
文献[3]针对对向行驶车辆间视频数据传输问题,提出了一种基于通信连通性和视频数据流比特率自适应的功率控制算法,较大发送功率可抵抗信道衰落,较小发送功率则可以减少节点发送数据之间的碰撞,因此就在这两者之间运用启发式理念构建目标函数寻求发送功率的最优化。但本文的算法只定位在双向两车道的场景下,并且是对向行驶车辆间数据传输,其局限性较大。文献[4]通过功率控制解决了数据广播时的覆盖率问题。当节点可收到源节点信息但无法正确解码时,通过所提出的基于NACK (Negative Acknowledgement)反馈机制并结合功率控制,与即时邻居之间建立联系,寻求即时邻居的信息重传;当节点无法收到源节点信息,即处于空洞状态时,即时邻居通过接收信号强度预判周边空洞节点,从而即时转发信息,提高覆盖率。该算法更适用于紧急消息的发送,对于周期发送的车辆状态信息而言,只需覆盖附近车辆即可,无需长距离高覆盖率的转发。文献[5]将节点的发送功率设置为随机的,远距离的节点只能收到大功率发送的信号,而近距离的节点大功率和较小功率的信号均可接收,从而减小了远距离节点之间数据包的碰撞。信道的利用率和数据包的碰撞可通过改变发送功率的随机分布调整。该算法发送功率所遵循的随机分布是影响性能的关键,这需要具体场景的实测或者复杂的数据建模,无疑降低了算法的实用性以及自适应性。文献[6]针对紧急消息传播提出了单跳区域间快速转发与区域内广播重传相结合的机制,兼顾了信息传播速率以及覆盖率性能。在区域内广播重传机制中,节点通过检查信道占用率调节发送功率以提升数据包发送成功率。其功率控制的思想值得借鉴,但如何运用在短距离周期广播的车辆状态信息上还有待研究。文献[7]在分簇的VANET架构下提出基于非协作博弈的功率控制机制,实现了簇间和簇内通信性能的权衡。该机制为VANET功率控制开辟了一个新的视角,但在无分簇场景下的运用有待研究。文献[8]提出基于信道占用率检测的节点功率控制算法。不同场景下的最优信道占用率已载入节点的存储介质,节点使用不同的发送功率尝试,通过检测到的信道占用率反馈调整发送功率直到达到最优性能。然而实际中不同场景下信道是多变的,VANET拓扑也是不确定的,该算法的自适应性能还需进一步改进。文献[9]根据接收到邻居节点发射功率、相对速度、接收到最后一个包距离现在时间等信息给邻居节点标定度量值;而后对邻居节点依据度量值排序,再根据通信指标要求依排序筛选出要通信的节点,然后估算所需的发送功率。该算法的度量体系值得借鉴,但如何运用在周期状态信息上需要进一步研究。文献[10]主要研究在高速公路场景下,将车辆分簇后的路边单元(Road Side Unit, RSU)功率控制问题,以保障同向行驶车辆间的连通性。但RSU的布设将增大系统成本,在无RSU系统框架下车辆节点的功率控制问题并非本文研究重点。文献[11]兼顾驾驶员的反应时间以及车辆节点间通信冲突性能,提出了基于两类信标的发送功率控制机制。L信标用于大功率长距离发送,适用于安全应用,因此总是采用最大发送功率发送;S信标用于小功率短距离发送,适用于常规车辆信息应用,车速越快则发送功率越大,从而节点通信覆盖半径越大,以给驾驶员充足的反应时间。同时提出了新的队列中信标更新机制,保持信标信息的时效性。该机制对功率控制目的性的切入点值得借鉴,但节点的覆盖半径只是简单地与车速形成对应关系,通信方面性能的考量较少。文献[12]根据实际交通流数据得到流量分布,并且构建了信号传播模型,求得功率衰减和距离之间的关系;并在给定接收门限以及最大发射功率的情况下,仿真了不同传输距离对应的不同发射功率。其仿真结果值得借鉴,但针对周期状态信息如何自适应地调整发送功率有待进一步的研究。
基于上述分析,本文对VANET研究的出发点在于车辆的安全应用,因此,主要对状态安全信息的广播范围进行研究。整体思路是根据状态安全信息的需求范围来确定广播的目标区域,进而调整发射功率,控制广播的覆盖范围,这就形成了一种新的VANET组网方式。这种新的组网方式能够有效减少网络负载,降低“广播风暴”的发生概率,大大提高了网络性能,也提高了安全信息的传输性,进而提升车辆行驶的安全性。
1系统场景及模型
系统场景设定为双向六车道的高速公路,在车辆速度较快的高速公路场景下,当驾驶员行车时注意力不集中时,周围邻居车辆一些常规的驾驶行为都有可能引起重大交通事故。分析通常的交通事故可以发现,引起交通事故的原因主要是因为驾驶员对邻居车辆行驶状态的变化不敏感以及反应时间不足,因此,获取邻居车辆的状态安全信息有利于提高驾驶员的警觉性和提早做出反应,从而避免事故的发生。因此,直接邻居车辆的状态安全信息对本车辆的安全行驶具有重大意义,而相对的,其他位置上车辆的状态安全信息并没有太大的意义。也就是说,每个车辆节点发出的状态安全信息都只对与其直接邻居车辆节点有较大的价值。
假设所有的车辆节点都装有全球定位系统(Global Positioning System, GPS)、各种传感器、摄像头以及智能处理系统等车载设备,并通过卫星定位、传感器技术以及图像处理车道标志线技术等,使车辆节点能够收集到自身的状态安全信息,主要包括位置、速度、加速度及方向,当前发射功率以及时间戳等。
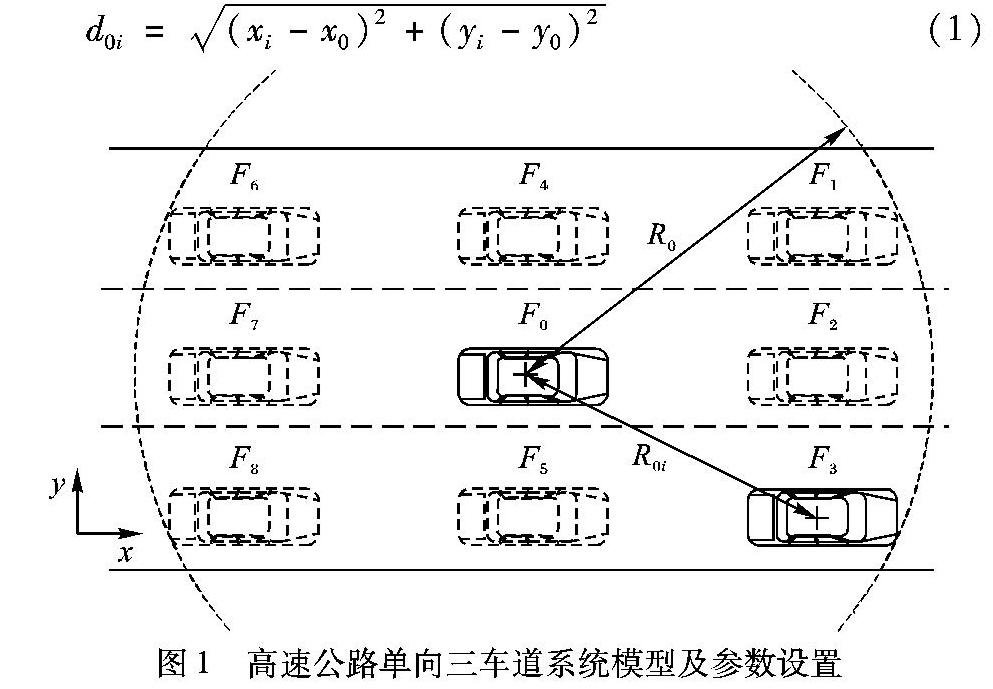
定义状态安全信息需求范围为每个车辆节点的广播能够覆盖所有的直接邻居车辆节点的最小范围。直接邻居车辆节点是指在某节点周围各个方向上最接近的邻居节点。需要说明的是,对发射功率的控制可转化为对通信覆盖半径的控制,即发射功率实际上可通过有效通信覆盖半径表征[6]。所谓有效通信覆盖半径是指在给定信道环境以及给定发射功率时,以发射节点为中心,能达到接收灵敏度的距离。由于车辆行驶过程中,车辆的分布是不均匀且不断变化的,所以R也是实时变化的,其取值范围是(0,Rmax),其中Rmax是车辆节点采用最大发射功率所对应的最大信息发送距离。图1为三车道公路车辆分布示例,将车辆节点抽象成位于其中心位置的点,则车辆节点的位置则用该点的坐标表示,点之间的距离则表示对应车辆节点之间的距离。图中节点F0的状态安全信息的需求范围R0=max(d0i)(i=1,2,…,8),其中d0i为节点F0与Fi之间的距离。在IEEE 802.11p中规定的最大节点通信半径约Rmax=1000m,车辆状态信息主要目的将用于邻居节点间交互以保持安全距离,因此节点的需求范围的上限设定为Rmax足以满足实际安全需要。节点F0与Fi之间的距离可以通过位置坐标算出,假设F0坐标为(x0, y0),Fi坐标为(xi, yi),则:
2功率控制算法设计及分析
2.1算法总体流程
节点间状态信息的信道竞争机制采用IEEE 802.11p中的介质访问控制(Media Access Control, MAC)机制[15]。借鉴802.11p中信道规划,将其用于安全信息的Ch172及Ch184信道分别分配给双向车道中的来向和去向车道。由于高速公路道路结构单一,车辆总体密度较为稀疏,因此为了提高信道资源利用率,在这两个信道上进行周期状态信息交互时并不采用IEEE 802.11p的信道切换机制,而是直接进行信道竞争从而发送信息。将周期状态信息的生成周期Tsg参照IEEE 802.11p中信道周期长度设置为Tsg=100ms[13],即每个节点每100ms产生一个新的状态信息。需要说明的是,状态信息的生成周期不等于其发送周期,因为节点在生成状态信息后需要参与信道竞争,而周期状态信息实际上是一跳通信范围内节点间的信息交互,在高速公路场景下,除了节假日高峰车流或者部分路段因事故等情况出现极端拥堵时,常规路况下车辆之间车距都在百米以上,这就意味着总体上看节点分布较为稀疏,因此常规路况下车流密度对应的信道接入延迟通常在10-3~10-2s数量级[14],可以认为每辆车在一个状态信息生成周期内可成功发送自身状态信息。
将发射功率更新周期定义为功率控制周期,记为Tpc,意味着每间隔Tpc,节点重新将发射功率初始化为最大覆盖范围,而在功率控制期间则根据直接邻居相对位置变化作微调。为便于讨论,将其设定为周期状态信息的生成周期Tsg的整数倍,即表示为Tpc=k·Tsg,其中k为正整数。k的值可根据高速公路最高与最低限速的车辆间相对速度差距大小设定,例如最高限速为120km/h,最低限速为60km/h,则车辆间最大相对速度差约为16m/s,而实际上大部分车辆速度分布在80~100km/h,相对速度差约为5m/s。相对速度差距越大则k值越小,也就是说应让节点越频繁地进行功率调整,通常经验值可设定为10,即Tpc约为1s。在Tpc 期间将通过周期状态信息的交互实现近处车辆间感知,而每隔Tpc进行发射功率重置是用于远处车辆间感知。远处车辆间Tpc=1s内将产生5m的相对位移,近处车辆间Tsg=0.1s内将产生0.5m的相对位移。在高速公路中百米数量级的车距下,上述量级的相对位移所导致的发射功率控制误差可忽略,并且还可通过略微增加发射功率余量修正这一误差带来的性能损失。
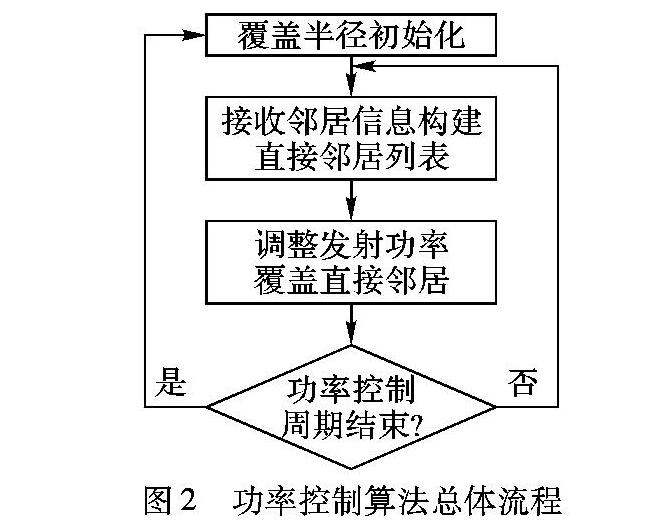
功率控制算法的总体流程如图2所示。在节点各自的功率控制周期的起始时刻,车辆都以其最大发射功率向其周围车辆节点广播状态安全信息。根据IEEE 802.11p规定最大的通信半径约为1000m[11],在高速公路常规路况下,对信道产生相互竞争影响的节点数在100~3×101的数量级,也就是说参与竞争的节点数并不多,并且其他节点并不都处于功率控制周期起点,即并不都以最大通信半径覆盖周围节点,也就确保了初始通信半径下仍可有低于周期状态信息生成周期的信道接入延迟(约10-3~10-2s数量级[14])。每个车辆节点收到其周围邻居节点的信息后,创建邻居节点列表,为每个邻居构建表项,表项中包含着邻居车辆节点的各项信息。接着车辆节点在功率控制周期内对邻居列表进行更新和维护,主要是保留其直接邻居节点的信息,删除其他邻居节点,同时丢弃其他邻居之后发来的状态信息数据包以节省存储空间。确定直接邻居节点后,通过检测接收到的直接邻居的数据包信号强度以及数据包中携带的发射功率评估信道衰落情况,从而估算车辆节点的发射功率,使节点发送的信息能够被所有直接邻居节点所接收。在确定完数据包的发射功率并成功接入信道将其发送出去后,在等待下个状态信息生成周期Tsg起始时刻到来期间通过接收其他节点的信息更新直接邻居列表,该过程不断循环直至进入下一个功率控制周期。
2.2直接邻居列表建立与更新
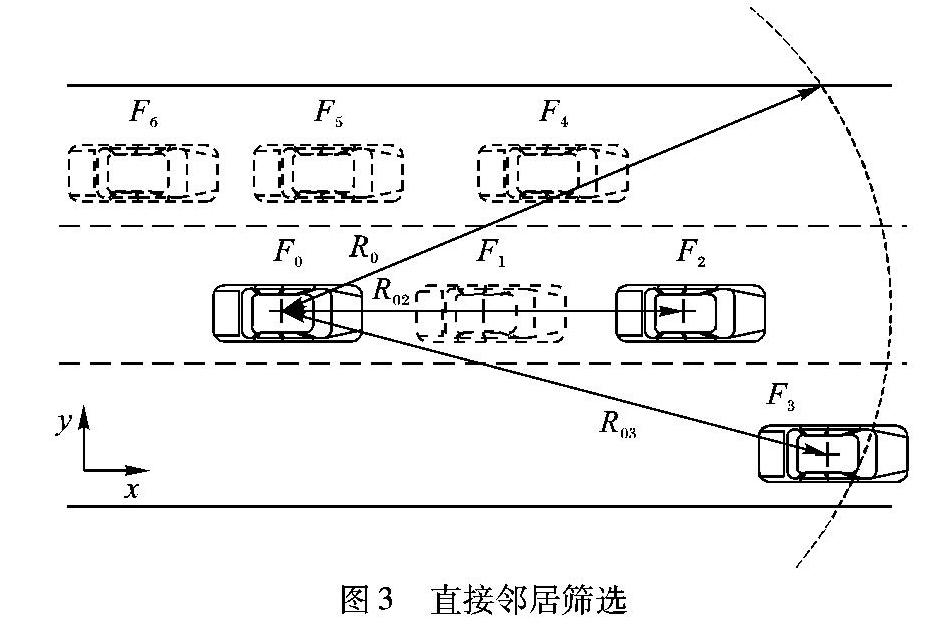
虽然高速公路场景下VANET中的车辆节点都在不断地快速移动,车辆节点的位置以及与周围车辆的位置关系也是不断变化的,但是若只考虑车辆节点与其他车辆的相对位置,则周围车辆与本车辆之间直接相邻的节点大致可归结为8个方向上最接近的邻居,即前、后、左、右、左前,右前、左后、右后。并且高速公路双向车道中间存在隔离栏,因此只需考虑同向行驶的车辆。最外侧和最内侧车道上节点只需考虑5个方向上的直接邻居即可,例如图1中F4和F5的直接邻居分别为(F0、F1、F2、F6和F7)和(F0、F2、F3、F7和F8);而位于中间车道的节点则要考虑8个方向的直接邻居,例如图1中F0的直接邻居为(F1、F2、F3、F4、F5、F6、F7和F8)。但实际路况中道路上的车辆分布是不规则的,如图3所示,图中F0的直接邻居车辆节点是F1及F3,但是F0与F2的距离小于F0与F3之间的距离,所以若仅用最短距离原则判断车辆的直接邻居车辆节点,则可能误将F2作直接邻居节点而忽略掉了真正的直接邻居节点F3。因此,本文将通过车辆行驶方向、车辆间距离和车辆所在车道三个要素来找出其直接相邻节点。
由于各节点的最大通信范围相同且功率控制周期也均设为Tpc,其信道接入延迟在10-3~10-2s数量级,即小于Tsg,因此尽管各节点功率控制周期起点不同,但节点在时间跨度Tpc+Tsg之内必然能够收到自身最大通信范围内所有邻居至少一次的信息。这样,每个节点在每个功率控制周期起始时刻再等待一个状态信息生成周期Tsg后,便可根据最近时间跨度Tpc+Tsg内收到的邻居节点信息构建一跳邻居列表。当有新增车辆启动时,由于所有车辆都是采用广播的形式,该车能接收到周围车辆发来的信息,若未接收到任何信息,则说明新车辆不在周边节点的通信覆盖范围内,此时,新增车辆应采用最大功率广播自身的状态安全信息告知周边节点。
当节点创建邻居节点列表后,按邻居节点与自身的距离大小排列。此时,由于反方向车辆也在通信范围内,但是反方向车辆不属于状态安全信息的范围之内,因此删除邻居节点列表里的反方向车辆,并丢弃其发来的信息包。
对于剩余的同方向的车辆节点表项,需要分车道进行分析。以图3为例,对于与F0同车道的节点,从F0前后车之中分别选取距离最小的一辆,此处为F1,其中前后位置通过节点位置的x坐标来确定。然后在邻居节点列表中删除与F0同车道中除F1以外的全部邻居车辆节点,并丢弃这些节点发来的数据包。若F0是在中间车道上,则先添加其两侧车道上与之距离最近的节点,如F0左侧车道的F5。再分别选取F5前后离本车距离最近的两辆,此处为F4和F6,最后删除F5所在车道其余车辆节点信息,此后丢弃这些被删节点后续发来的数据包。这样,F0的直接邻居节点列表创建完毕。
在邻居节点列表添加完毕以后,车辆节点就调整其发射功率,使要广播的状态安全信息恰好能够覆盖每个直接邻居车辆节点。当然,为了覆盖到某个方向上的直接邻居可能在其他方向上会覆盖到直接邻居之外的节点,例如图3中F0为了覆盖到右侧车道F3也将覆盖同侧车道F2。在高速公路总体节点分布较为稀疏的情况下,这种冗余覆盖并不会过多增加信道竞争。
由于车辆是不断移动的,车辆间的相对位置也是一直发生变化,每个车辆的直接邻居节点也会发生改变。由于状态安全信息是周期性的广播消息,因此,每个车辆节点需要功率控制周期内根据收到最新的直接车辆状态安全信息作出通信覆盖范围的微调。若在此期间收到新增节点的信息则需要更新直接邻居列表并对应地调整发射功率。在覆盖直接邻居的原则下,节点间发射功率调整具有反馈效应,从而实现自适应调整。并且由于节点只覆盖各自的直接邻居,竞争同一信道的节点数很少,信道接入时延可降至仅为10-3s数量级,远小于周期状态信息的生成周期。例如,图3中假设节点F2比节点F1先接入信道,则节点F0收到节点F2的信息后根据当前邻居表判断在F2方向上暂无更近邻居,则下个周期状态信息的发射功率预设为覆盖到F2的值。若在F0发送下个周期状态信息之前又收到来自F1的信息,F0则将该方向上的直接邻居更新为F1,因此F0下个周期状态信息只覆盖到F1。而当F0收到F3的信息后,发现其为对应方向上直接邻居,则F0将增大发射功率使得下个周期状态信息能够覆盖到F3,此时F2将作为冗余邻居被覆盖。这样,无论周边节点以何种发射功率发送信息,接收节点总能利用直接邻居原则自适应调整发射功率,在确保安全性的同时尽量减少冗余覆盖,降低信道资源竞争。
3性能仿真与分析
3.1仿真场景及参数设置
VANET中节点的移动受到道路及障碍物的影响,同时节点的高速移动使得网络拓扑具有不稳定性。为了在NS-2中对功率控制算法进行仿真验证,先要保证仿真场景中车辆节点的移动轨迹尽量接近现实中的车辆移动轨迹。基于这个目的,本文利用SUMO(Simulation of Urban Mobility)交通仿真器构建长度为10km的双向六车道高速公路模型,单向车道每公里车辆密度为3~30辆,车速范围60~120km/h。
在NS-2中搭建VANET协议架构如下:在应用层,通过数据流发生器CBR(Const-RitRate)建立从信息源到距离信息源xm远处装备车辆的通信连接,数据发生率为10packet/s,数据传输率为3Mb/s;CBR发送的数据分组大小为230Byte,发送时间间隔为0.02s。在传输层,使用的传输协议为用户数据报协议(User Datagram Protocol, UDP)。在网络层,路由算法并不是本文研究的重点,因此选择Ad Hoc按需距离矢量路由(Ad Hoc On-demand Distance Vector routing, AODV)作为网络层协议进行分析,而且为了避免路由性能对数据传输的影响,将只考虑直接邻居间周期状态信息的收发。在MAC层选择主要用于车载电子通信的IEEE 802.11p协议。在物理层,对车载设备的各种参数进行设置,在传播模型上选择Two-ray Ground。周期状态信息生成周期设置为100ms;功率控制周期设置为1s,因为常规路况下1s内车辆间相对位置通常变化较小。仿真将比对本文所提的算法和所有节点采用固定的发射功率以及采用随机功率控制[5]时的性能。其中随机功率控制的发射功率范围依据文献[5]的参数设定为范围在[4dBm, 33dBm]的离散均匀分布,功率变化增量为0.5dBm;固定的发射功率则设为33dBm,该功率值能够保证所有的车辆节点在Two-ray Ground传播模型下的传输距离为1000m。仿真主要针对在不同的车辆节点密度进行分析,根据实际高速公路常规路况下的交通数据统计,车辆密度变化范围为单向三车道3~30辆/km。仿真的网络性能参数主要有:1) 平均发射功率,即网络中车辆节点平均发射功率变化情况;2) 信道占用率,即单位时间内信道被占用时间的百分比;3)直接邻居数据包投递率,即单位时间内直接邻居平均接收到状态信息数据包个数和源节点发送的数据包总数的比值。
3.2平均发射功率
车辆通过找出其直接邻居车辆节点来调整其发射功率,由于车辆在行驶过程中位置是不断变化的,因此其发射功率也是动态变化的。图4所示的是仿真过程中车辆节点发射功率的变化曲线,从图中可以看出,固定发射功率情况下,发射功率是固定的;随机功率控制下功率是时变的,但是由于采用均匀分布,因此其均值不变,均为18.5dBm;在本文提出的自适应功率控制算法下,车辆节点的平均发射功率将随着节点密度动态变化。
当节点密度稀疏时(单向三车道3辆/km),节点平均间距约为1000m,因此为了覆盖该平均间距下的直接邻居,节点平均意义下都以最大功率进行数据发送,以保障连通性。因此,本文提出的自适应功率控制的平均发射功率约为最大发射功率值33dBm。随着节点密度增加,节点间平均间距逐渐减小,因此在自适应功率控制中覆盖直接邻居所用的平均发射功率也随之减小。当节点密度处于高速公路场景中较为密集的单向三车道30辆/km时,节点的平均发射功率降至8dBm左右。同时,平均发射功率曲线的变化趋势也符合本文设计的算法,从单向三车道3辆/km开始随着车辆的增多,车辆间的平均距离缩小较大,使得发射功率下降趋势也较快;而当车辆密度越来越大,随着车辆的增多,车辆间的距离缩小幅度减小,因此发射功率下降也较为平缓。随机功率控制和自适应功率控制曲线的交叉点意味着在车辆密度为单向三车道13辆/km左右时,两者平均意义下节点的平均发射功率相同。从上述分析中看出,本文所提出的功率控制算法具有节点密度自适应性。
3.3信道占用率
图5描绘了不同车辆密度下,自适应功率控制、随机功率控制以及固定发射功率下信道占用率情况。三种机制的信道占用率均随着节点密度增大而增大,但固定发射功率的增长幅度最大,随机功率控制次之,自适应功率控制最小。这是因为,在固定发射功率中,节点均以最大发射功率发送信息,节点密度增大后节点间竞争激烈程度愈加严重。随机功率控制下,节点密度增大后节点间竞争也会更加激烈,但由于发送功率的随机性,平均意义下相互间直接竞争的节点数的增幅将小于固定发射功率,因此其信道占用率增幅较固定发射功率的小。自适应功率控制下,节点均以覆盖直接邻居为目标调整发射功率,因此节点密度不同对直接邻居节点个数影响不大。由于更大的节点密度将导致覆盖的冗余邻居数更多,因此信道占用率随着节点密度增加也将略有增加。
另外,可以看到在节点密度很稀疏 (单向三车道3辆/km) 的情况下,自适应功率控制的信道占用率与固定发射功率相当,但大于随机功率控制。这是因为此时节点间距约等于节点的最大通信覆盖半径,因此自适应功率控制为了覆盖直接邻居则和固定发射功率的发射功率相当。而随机功率控制下的节点由于发射功率的随机性,在某些时刻的通信覆盖半径小于节点间距,因此节点间竞争更弱,信道占用率更少。但由于节点在每个时刻具体的发送功率不可控,这使得随机功率控制无法保证节点间的连通性。
3.4直接邻居数据包投递率
图6描绘了在不同车辆密度下自适应功率控制、随机功率控制以及固定发射功率的直接邻居数据包投递率。
由图6可知,自适应功率控制和固定发射功率的曲线均呈下降趋势,当节点密度稀疏 (单向三车道3辆/km) 时,自适应功率控制的直接邻居数据包投递率与固定发射功率相当,而随着节点密度增加自适应功率控制曲线的降幅明显小于固定发射功率。这是因为在节点密度稀疏时车间距已接近最大通信覆盖半径,因此自适应功率控制下的节点基本都采用最大发射功率进行数据包发送,其效果与采用最大发射功率的固定发射功率相当。随着节点密度增大,车间距逐渐减小,固定发射功率下产生竞争关系的节点数量逐渐增多且愈加严重,而自适应功率控制的节点以覆盖直接邻居为目标,仅覆盖个别冗余节点,因此自适应功率控制下产生竞争关系的节点数量仅少量增多,从而其直接邻居数据包投递率性能下降小于固定发射功率的情况。另外,可以看到随机功率控制的曲线呈上升趋势,但性总体劣于前两者。这是因为在节点密度稀疏时,随机产生的发射功率可能无法覆盖直接邻居从而导致断链,并且节点密度越稀疏这种情况越严重,在单向三车道车辆密度为3辆/km时的直接邻居数据包投递率仅为24.77%。随着节点密度逐渐增大,随机功率控制节点间距逐渐减小,相互覆盖的概率逐渐增大,因此直接邻居分组投递率逐渐上升。但在高速公路场景下车辆密度总体较低,因此常规路况下(单向三车道车辆密度小于30辆/km)随机功率控制的节点相互覆盖概率仍较低,总体数据包投递率仍小于固定发射功率及自适应功率控制的性能。
4结语
本文从车载自组织网络的安全应用角度出发,在高速公路场景下对状态安全信息的广播覆盖范围进行研究,提出新的功率控制算法。该算法以覆盖各方向上直接邻居为目标,通过功率控制周期期间监听邻居信息,构建并更新直接邻居列表,进而调整发射功率,这也将形成一种新的VANET组网方式。仿真结果表明,采用自适应功率控制算法的节点与固定发射功率以及随机功率控制的节点相比能够针对车辆密度自适应地调整广播覆盖范围,有效降低信道占用率,同时保障较高的直接邻居数据包投递率,提高了车辆行驶的安全性。
参考文献:
[1]RAMANATHAN R. Making Ad Hoc networks density adaptive [C]// MILCOM 2001: Proceedings of the 2001 IEEE Military Communications Conference on Communications for Network-Centric Operations: Creating the Information Force. Piscataway, NJ: IEEE, 2001, 2: 957-961.
[2]SCHNAUFER S, FLER H, TRANSIER M, et al. Vehicular Ad-Hoc networks: single-hop broadcast is not enough [C]// Proceedings of the 2006 IEEE Wireless on Demand Network Systems & Services. Piscataway, NJ: IEEE, 2006: 80-83.
[3]BELYAEV E, VINEL A, EGIAZARIAN K, et al. Power control in see-through overtaking assistance system [J]. IEEE Communications Letters, 2013, 17(3):612-615.
[4]KHAN F,CHANG Y,PARK S, et al. Towards guaranteed delivery of safety messages in VANETs [C]// GLOBECOM 2012: Proceedings of the 2012 IEEE Global Communications Conference. Piscataway, NJ: IEEE, 2012: 207-213.
[5]KLOIBER B, HRRI J, STRANG T. Dice the TX power — improving awareness quality in VANETs by random transmit power selection [C]// Proceedings of the 2012 IEEE Vehicular Networking Conference. Piscataway, NJ: IEEE, 2012: 56-63.
[6]WEI L, XIAO X, CHEN Y, et al. Power-control-based broadcast scheme for emergency messages in VANETs [C]// ISCIT 2011: Proceedings of the 2011 11th International Symposium on Communications and Information Technologies. Piscataway, NJ: IEEE, 2011: 274-279.
[7]YU O, SARIC E. Feedback-free non-cooperative power control game for vehicular Ad Hoc networks [C]// VTC2014 Fall: Proceedings of the 2014 IEEE 80th Vehicular Technology Conference. Piscataway, NJ: IEEE, 2014: 1-5.
[8]NASIRIANI N, FALLAH Y P. Performance and fairness analysis of range control algorithms in cooperative vehicle safety networks at intersections [C]// Proceedings of the 2012 IEEE 37th Conference on Local Computer Networks Workshops (LCN Workshops). Piscataway, NJ: IEEE, 2012: 848-855.
[9]TIAN J, LV C. Connectivity based transmit power control in VANET [C]// Proceedings of the 2012 8th International Wireless Communications and Mobile Computing Conference. Piscataway, NJ: IEEE, 2012: 505-509.
[10]TAO J, ZHU L, WANG X, et al. RSU deployment scheme with power control for highway message propagation in VANETs [C]// GLOBECOM 2014: Proceedings of the 2014 IEEE Global Communications Conference. Piscataway, NJ: IEEE, 2014: 169-174.
[11]KIM B, SONG H, LEE H S. Bi-Beacon: two-level power control for enhancing beacon performance in vehicular Ad Hoc networks [C]// ICCVE 2014: Proceedings of the 2014 International Conference on Connected Vehicles and Expo. Piscataway, NJ: IEEE, 2014: 1000-1001.
[12]CHENG L, SHAKYA R. VANET adaptive power control from realistic propagation and traffic modeling [C]// RWS 10: Proceedings of the 2010 IEEE Conference on Radio and Wireless Symposium. Piscataway, NJ: IEEE, 2010: 665-668.
[13]QIU H J F, HO I W H, TSE C K, et al. A methodology for studying 802.11p VANET broadcasting performance with practical vehicle distribution [J]. IEEE Transactions on Vehicular Technology, 2014, 64(10): 4756-4769.
[14]CHATZIMISIOS P, BOUCOUVALAS A C, VITSAS V. Packet delay analysis of IEEE 802.11 MAC protocol [J]. Electronics Letters, 2003, 39(18): 1358-1359.
[15]ZHENG J, WU Q. Performance modeling and analysis of the IEEE 802.11p EDCA mechanism for VANET [J]. IEEE Transactions on Vehicular Technology, 2015, 65(4): 2673-2687.
[16]TORRENT M M, MITTAG J, SANTI P, et al. Vehicle-to-vehicle communication: fair transmit power control for safety-critical information [J]. IEEE Transactions on Vehicular Technology, 2009, 58(7): 3684-3703.
