
存储式测斜仪的研制*
2016-09-26 08:27屈召贵龚名茂
网络安全与数据管理 2016年11期
屈召贵,龚名茂
(四川工商学院 实验中心,四川 成都 611745)
存储式测斜仪的研制*
屈召贵,龚名茂
(四川工商学院 实验中心,四川 成都 611745)
针对目前矿井钻探所用的钻孔轨迹测量方法存在技术指标高、工序复杂等问题,研制了由加速度计ADXL206和陀螺仪ADXRS645构成的存储式测斜仪。以微控器为核心,采用抗干扰、误差修正、温度补偿等校正措施。仿真与测试结果表明,该系统具有测量精度高、稳定性好、工作时间长等优点。
存储式;测斜仪;加速度计;陀螺仪
引用格式:屈召贵,龚名茂. 存储式测斜仪的研制[J].微型机与应用,2016,35(11):37-39.
0 引言
在地质灾害监测过程中,经常需要通过钻孔分析地质信息。钻孔是否按照设计轨迹方向钻进,需要通过实际测孔才能确定。矿井超前勘探以及精确的定向工程钻探都需要高精度且能全方位测量钻孔轨迹的设备。因此,测斜仪是定向钻进工程中必不可缺的一部分。目前国内使用的高精度随钻测斜系统大多是从国外引进的,价格昂贵,使用不方便,维修成本高。为此,本系统采用由基于MEMS芯片的加速度传感器、陀螺仪、高温存储芯片和微控制器构成的存储式测斜系统,提出软硬件实现方法。
1 存储式测斜仪的组成及原理
1.1存储式测斜仪的组成
存储式测斜仪主要由参数测量、数据存储、控制和供电管理四部分构成,如图1所示。要求其所有器件均能在环境温度-25~125℃范围内可靠工作。
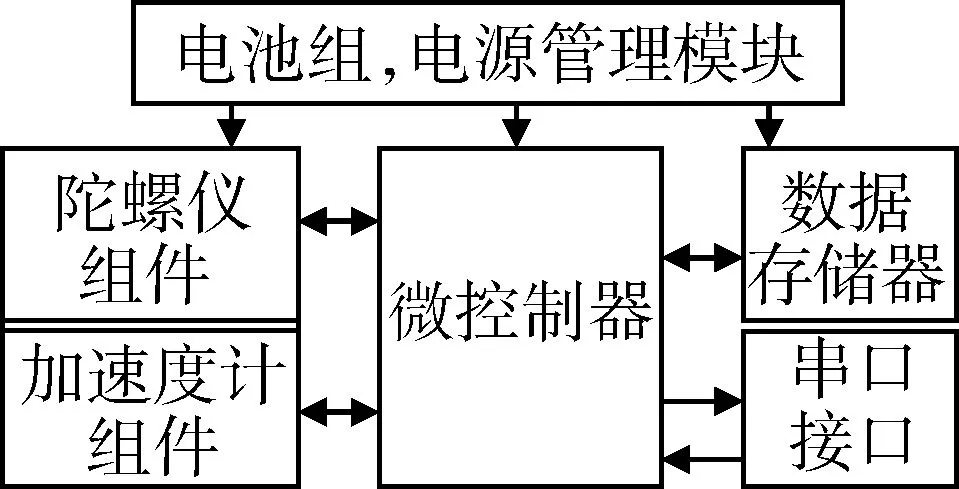
图1 测斜仪整体框图
系统要求测斜仪安装在长30 cm、宽40 cm的探管中,能将方位角、倾角、工具面角、时间等数据进行保存,测试完成后通过RS232通信将所测数据导出。要求在探管下放的过程中,数据测量模块处于断电状态,当探管下放到指定高度时开始给测量模块供电,使其将测量的井斜、方位等信息通过微控制器进行存储(每组36 B)。工作约1 min后继续下放,在此过程中再次切断测量模块电源,以降低功耗和减少系统自身发热。因此,除测量、存储模块外,还包括晃动检测(检测是否为下降过程)和继电器控制主电源(控制测量模块电源)模块。
1.2存储式测斜仪的基本原理

图2 方位角、倾角示意图
根据导航学旋转变换中的欧拉定理,载体在空间中的姿态可用相对于地理坐标系有限次的转动来表示,每次转动的角度即为航向角、俯仰角和横滚角,即是钻孔中的方位角、倾角和工具面角[1-3]。如图2所示,α为方位角,β为倾角。
加速度计用于测量倾角,即物体相对水平面的夹角,有单轴、双轴和三轴之分,本设计采用双轴加速度,其倾角测试示意图如3所示,X轴和Y轴相互正交,其倾角β的计算数学关系式如式(1)、式(2)所示。
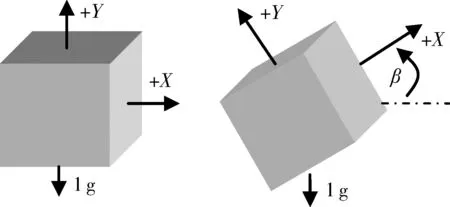
图3 双轴倾斜检测图

(1)
(2)
式中,AXout和AYout为X轴和Y轴的加速度。
陀螺仪是测量角速度的传感器,测量方位角需要通过对角速度ω和时间t的乘积进行积分转换成转动的角度α,如式(3)所示。
α=∫ωtdt
(3)
由上述可知,只要通过传感器测量出加速度计中的X、Y支路的输出就可测量出倾角,只要测量出陀螺仪中的角速度就可测量出方位角,两者结合即可换算成对应方位的倾斜[4-5]。
2 存储式测斜仪的硬件设计
系统硬件部分的加速度计和陀螺仪采用基于MEMS的ADI公司的ADXL206和ADXRS645,工作温度极限可达175℃;数据存储选用在片512 KB的25LC512,微控制器选用PIC18F25K80,通信模块选用ADM232,此芯片的工作温度可达125℃,能满足系统要求。硬件框图如图4所示。

图4 硬件框图
其中DC-DC2经过热保护器(型号:KSD9700~110°)给晃动检测及存储模块供电,下井后持续供电,热保护器的作用在于当工作温度达到110℃之后切断DC-DC2的供电,从而起到保护作用。微控制器选用了PIC18F25K80,工作温度为-40℃~125℃,其内置的12位ADC足以将加速度计、陀螺仪和晃动检测单元的模拟信号转化为精度足够的数字信号,而内置的定时器可以作为同步时间的基准信号,通过RS232给定时器写入当前时间来实现实时时钟的功能。测量的倾角、方位角、工具面角和时间等信息存储在外扩的Flash存储器中,在返回地面后,能通过RS232接口将存储的数据传输给上位机。
存储器选用MicroChip公司的SPI接口EEPROM存储器25LC512,该存储器温度范围达-40℃~+150℃,容量为512 KB,按照测量模块每组数据36 B计算,一共可存储1 820组数据。
3 存储式测斜仪的软件设计
软件设计主要包括位置信息解算程序、数据存储程序、电源管理程序和通信程序。
位置信息解算主要是通过测量加速度传感器的输出和陀螺仪的输出模拟信号通过A/D转换后,经过计算而得。加速度传感器ADXL206提供X和Y轴的加速度对应的模拟电压VX和VY,0 g对应VS/2,VS取5 V,由数据手册可知对应的X、Y轴的加速度分别为AX和AY,如式(4)、(5)所示。代入式(1)可求出倾角。
AX=(VX-2.5)×3.2/mV/g
(4)
AY=(VY-2.5)×3.2/mV/g
(5)
设计倾角测量精度为0.1°,测量范围为-80°~+80°,则A/D采样的分辨率为3.2 mg/LSB,如式(6)所示。±1 g对应的加速度计输出电压为2.3 V~2.7 V,A/D选择的输入电压范围为±320 mV。
Δg=1g×(sin80-sin(80-0.1))=3.2 mg
(6)
陀螺仪ADXRS645提供角速度ω对应的模拟电压值输出Vout,0°/s对应2.5 V,通过测量其模拟电压值可以转化为角速度,转换方法如式(7)所示。角速度ω转换为角度α的方法如式(3),具体软件实现方法是对角速度ω乘以程序运行一次所需的时间Δt,如此循环,然后对每次乘积进行累加,结果即为转过的角度α[6-8]。由此可完成±180°的方位角测量。
ω=(Vout-2.5)/1mV/°/s
(7)
数据存储主要是对所测得的倾角、方位角、时间等信息进行存储,每次需完成36 B的数据存储。软件中采用由结构体和一维组构成的线性表进行数据存储。
typedef struct FRAM_adddata
{uint32_t add;
//地址
uint32_t dat;
//数据
}FRAM_ADDDATA;
FRAM_ADDDATA * Fram_Tabl[36];
4 实验测试与结果分析
系统软硬件设计好后,对系统进行了测试。首先测试加速度计误差,加速度计倾角为0°时,用毫伏表测得VX=2.498 V,VY=2.500 3 V,X轴存在约50 mg、Y轴存在1 g的失调误差,采用两点法测失调和放大器增益,进行校准。下面以X轴为例说明校准方法,在X轴取两点,置于+1 g和-1 g的场中,测得输出如式(8)和(9)所示,其中AOFF为失调[9-10]。
A+1g=AOFF+(1g×Gain)
(8)
A-1g=AOFF-(1g×Gain)
(9)
由(8)、(9)两式可确定失调AOFF和增益Gain,如式(10)、(11)所示。
AOFF=0.5×(A+1g+A-1g)
(10)
(11)
将测量结果减去失调,然后将所得结果除以增益,即为实际值,如式(12)所示。调整了软件算法,最后测得在0°时VX=2.500 01 V,VY=2.500 02 V。
(12)
同理,可校正陀螺仪的失调引起的误差和灵敏度失配引起的误差。
将仪器置于80℃的杜瓦瓶中进行测试,根据需求持续工作8 h,分别设置方位为60°、80°、150°;倾角10°、30°、60°等进行测试,将所测数据通过串口依次读出,其数据如表1所示。

表1 方位角和倾角测试数据
由表1中数据可知,方位角和倾角的相对误差均小于等于0.3%,有较高的精度。
同时,对数据存储的稳定性进行了测试,将环境温度提高到110℃,持续工作,依次间隔5 min读取一次,数据连续,无出错数据。
5 结论
本文设计的由基于MEMS器件的加速度传感器、陀螺仪、高速存储器和微控制器构成的存储式测斜仪,能工作在-25℃~+125℃的环境中,软件上使用滤波算法对两个传感器的数据进行滤波融合,解决失调等引起的误差,同时也解决了加速度计测量动态角度不准确等问题。所设计的测斜仪具有精度高、适应环境温度高、体积小、功耗低等优点。
[1] 詹世玉. 随钻测量系统设计[J]. 自动化与仪器仪表,2011(2):134-135,138.
[2] 于小波,杨超. 随钻井斜监测预警系统研究[J]. 石油机械,2011,39(3):47-49.
[3] 张杰. 基于MEMS陀螺仪和加速度计的动态倾角传感器[J]. 机械设计与制造,2012(9):141-143.
[4] 李成文,杨军祥,王纯委,等.新一代直升机综合核心处理机技术研究与实现[J].电子技术应用,2014,40(12):121-124.
[5] 应科炜,吴文贡,汤达斌,等. ADXRS角速度检测陀螺仪原理及应用[J]. 传感器世界,2006,12(1):42-44,41.
[6] 曾勇,杨涛,岳高铭. 基于MEMS微加速度计的振动测试仪[J]. 传感器与微系统,2007,26(6):75-76,89.
[7] 张玉波,毕洪波,魏春明,等. 高精度随钻测斜仪的设计[J]. 电子技术应用,2007,33(10):78-80.
[8] 袁磊. 电子式随钻测斜仪器的研制及应用[J]. 石油机械,2013,41(7):78-81.
[9] 雷晓荣,程建远. YZG05/30矿用钻孔轨迹记录仪及其应用[J]. 煤田地质与勘探,2015,43(4):120-122.
[10] 温锋,李锦明.基于FPGA的激光陀螺信号高速解调滤波设计[J].电子技术应用,2014,40(1):90-92,96.
Development of storage type inclinometer
Qu Zhaogui,Gong Mingmao
(Experiment Center, Sichuan Technology and Business University, Chengdu 611745, China)
In view of the problem of high technique index and complex process in present mine drilling borehole trajectory measurement, a storage type inclinometer has been developed by ADXL206 accelerometer and gyroscope ADXRS645. Micro controller as the core, adopting anti-interference, error correction, temperature compensation as correction measures. The simulation and test results show that, this system has high measurement precision, good stability, long working hours, etc.
storage;inclinometer; accelerometer; gyroscope
四川省教育厅重点项目(自然科学)(16ZA0424);四川工商学院创新科研基金(2013CSCDKY0046)
TH763.5
A
10.19358/j.issn.1674- 7720.2016.11.012
2016-01-11)
屈召贵(1980-),通信作者,男,硕士,讲师,主要研究方向:仪器仪表,嵌入式计算机技术。E-mail:35247485@qq.com。
猜你喜欢
结构工程师(2022年2期)2022-07-15
北京航空航天大学学报(2021年9期)2021-11-02
空间科学学报(2020年4期)2020-04-22
中国惯性技术学报(2019年1期)2019-05-21
现代计算机(2018年19期)2018-08-01
百科探秘·航空航天(2017年9期)2017-12-31
中国惯性技术学报(2017年1期)2017-06-09
中学生数理化·七年级数学人教版(2017年1期)2017-03-25
山东工业技术(2016年15期)2016-12-01
系统工程与电子技术(2016年7期)2016-08-21
