双变量施肥机的设计与试验
2016-09-26 12:10:28李凯张立新张立萍楚世哲祁晓敏钱营李继霞郭振华
甘肃农业大学学报 2016年4期
李凯,张立新,张立萍,楚世哲,祁晓敏,钱营,李继霞,郭振华
(石河子大学机械电气工程学院,新疆 石河子 832000)
双变量施肥机的设计与试验
李凯,张立新,张立萍,楚世哲,祁晓敏,钱营,李继霞,郭振华
(石河子大学机械电气工程学院,新疆 石河子832000)
【目的】 为解决传统均匀施肥结构不合理,作物养分投入比例失调,化肥利用率偏低,环境污染严重等问题.【方法】 设计了一种可与国产拖拉机配套使用的变量施肥机,该施肥机采用一体三箱式的结构,外槽轮作为变量施肥机的排肥装置,通过调节外槽轮排肥器的转速和开度.【结果】 在外槽轮排肥器开度不变的情况下,增加排肥器转速,排肥量也随之增加,但不呈线性增加的趋势;在外槽轮排肥器转速不变的情况下,增加排肥器开度,排肥量也随之增加,也不呈线性增加的趋势.【结论】 该研究解决了传统均匀施肥结构不合理,可为提高施肥机的施肥精度提供参考.
变量施肥机;转速开度双变量;数学模型
我国农业生产所取得的巨大成就,很大程度上得益于增施化肥及施肥技术的发展.据联合国粮农组织统计,在其他生产因素不变的情况下,增施化肥可使农作物增产40%~60%.化肥成本已占我国当前农业生产性支出的30%以上[1-3].传统的均匀施肥,会造成肥力低的地段上的作物不能良好的生长,但是肥力较高的地段上化肥的过量使用,不能被吸收的一部分化肥会以滞留、吸附、随水径流、反硝化等方式污染土壤、地下水和大气,农作物有害物质超标、品质下降,影响人们的身体健康[4-5].
变量施肥则是解决上述问题的关键,变量施肥是以不同空间单元的产量数据与土壤理化性质、病虫草害、气候等多层数据的综合分析为依据,以作物生长模型、作物营养专家系统为支持,将化肥加以科学的配比,采用精准变量施肥机械进行精确定位施肥,实现在每一地块的按需施肥,以最大限度地优化使用肥料,获得最大的经济效益和环保效益[6-7].
我国农民拥有数量较多的农用拖拉机,因此研制出与之相配套使用的变量施肥机械应成为研究的重点.目前国内少有成熟的变量施肥机出现在市场上实际应用于田间施肥作业,多数处于实验室研究阶段,也有些单变量施肥机应用在田间施肥,但是其施肥精度较低,尤其是在施肥量较大和较小的时更为明显.本文针对目前国内农业中使用较多的拖拉机设计了配套的变量施肥机,该施肥机是基于差分全球定位系统(DGPS)来确定机具在田块中的准确作业位置,通过调节液压马达的转速与转向来调节槽轮的转速与开度,进而实现变量施肥[8-9].
1 总体结构和工作过程
1.1机械本体结构
本文所研制的双变量施肥机与国产功率为60 kW左右的拖拉机配套使用,双变量施肥机整体结构示意图如图1所示,施肥机采用三点悬挂方式,有拖拉机驱动.变量施肥机机械本体结构主要由机架、肥料箱、排肥装置、掺混器、开沟覆土装置、仿形轮机构和动力系统等部件组成.施肥机的转速开度双调节机构结构示意图如图2所示.
1.2控制系统组成
控制系统的设计在综合考虑国内外变量施肥机及施肥控制系统现状与发展趋势的基础上,确定基于上位工控机与下位单片机的电控液压传动闭环双变量施肥控制系统,该系统主要由外槽轮式排肥器、电磁驱动器、电磁比例调速阀、电磁换向阀、摆线马达、下位控制器、上位主控制器、转速、开度数据采集装置、GPS/DGPS模块等组成.从硬件上将系统分为液压传动系统、基于工控机的上位主控系统、基于STC单片机下位控制系统以及GPS/DGPS定位系统四部分进行设计.变量施肥机控制系统结构框图,如图3所示.
1.3转速开度双调节机构工作原理
施肥机在得到启动信号后,转速马达开始转动,带动槽轮和排肥挡轴一同转动,肥料经槽轮排出.在排肥量变化时,则有施肥控制系统根据田间施肥量会调用不同的转速开度组合序列,决定开度和转速马达的动作.当施肥量变化较小时可以通过控制电液比例调速阀改变转速马达的转速,实现排肥轴的转速调节;当施肥量变化较大时则可以通过控制三位四通换向阀改变开度马达的转向,开度连接件通过开度联轴器与开度马达的输出轴连接,开度连接件上的螺纹和开度套筒上的螺纹形成螺旋副,开度连接件转动时则带动排肥轴产生一个轴向位移,实现排肥轴的开度调节.

1:肥料箱;2:机架;3:开沟覆土装置;4:仿形轮机构;5:排肥装置;6:开度马达;7:转速马达. 图1 变量施肥机构结构Fig.1 Diagram of the structure of variable rate fertilizer treatment applicator
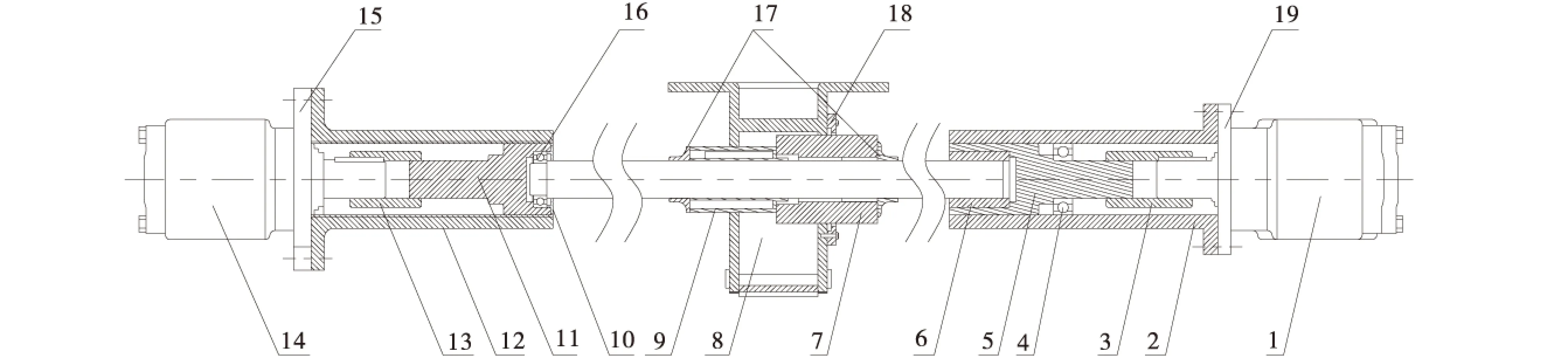
1:转速马达;2:转速套筒;3:转速联轴器;4:支撑轴承;5:转速连接件;6:花键;7:槽轮;8:排肥盒;9:排肥挡轴;10:轴承端盖;11:开度连接件;12:开度套筒;13:开度联轴器;14:开度马达;15:开度马达座;16:转动轴承;17:夹持器;18:密封盖;19:转速马达座. 图2 转速开度双调节机构结构Fig.2 Diagram of the structure of bivariate control parameters

图3 控制系统结构框Fig.3 The control system structure diagram
1.4双变量施肥机作业过程
双变量施肥机在田间进行施肥作业时,首先由GPS/DGPS定位模块获取施肥机实时的位置信息,通过RS232串口总线将数据发送到上位主控制系统,经决策系统进行分析处理,得到施肥机位置信息和施肥机的作业速度,进行网格识别,将施肥机位置信息与施肥处方图中的施肥量信息进行配合,得出该网格处施肥量Q,施肥决策中心综合施肥机行驶速度、施肥量Q以及转速开度标定函数模型给出该条件下施肥量对应的开度和转速组合值.同时,STC单片机下位控制系统对排肥轴转速和开度进行实时监测,将得到的数据传输到上位机系统,与当前施肥决策中心给出的转速、开度进行比较,若需要调节排肥轴的转速和开度,上位控制系统把转速和开度值传输到下位控制系统,经DA转换将该转速、开度值转化为驱动器所需的电压(电流)信号驱动电液比例调速阀和三位四通换向阀动作,进而控制液压马达的转速与转向,调节排肥器排肥轴有效工作长度和转速,肥料经排肥器排出,进入混肥器使3种肥料混合均匀后,经排肥管、开沟器后,肥料落在开沟器所开的施肥沟内,从而实现农田精准施肥.施肥作业过程中在屏幕中可显示施肥机的当前位置、施肥量、排肥轴速度和开度值、拖拉机行走的轨迹、肥料箱中所剩的肥料、已作业面积等信息,这些信息可由车载计算机实时记录保存,在施肥作业完成后可以下载下来,进行处理与分析,指导下次的施肥作业.
2 关键部件的设计
2.1肥料箱设计
肥料箱采取一体三箱式设计,可用于氮、磷、钾等多种肥料同时施肥,因此可有效配合控制系统实现多种肥料元素配比施肥,肥料箱底部由V型料仓拼接而成,该设计提高颗粒肥料的流净率、排肥均匀性的同时,还增加了整机的稳定性.
根据新疆农田施肥量统计,课题组所设计的变量施肥机施肥量范围为:200~1 400 kg/hm2.经试验测量过磷酸钙、颗粒钾、尿素3种肥料的堆密度分别为0.998、1.134、0.751 g/cm3,3种肥料与制作肥料箱的钢板材料之间的摩擦系数f最大不超过0.4.为了实现每次向肥箱内投入肥料后能够使得施肥机作业范围达到1 hm2,避免多次添加肥料的动作,设计肥料箱的容量为1 500 kg左右,肥料箱体积计算公式:
v=m/ρ
(1)
式中,v为肥料箱体积,m3;m为肥料箱设计容纳肥料质量,kg;ρ为肥料的堆密度,kg/m3.由上式可以得出肥料箱体积约为1.6 m3左右,确定肥料箱尺寸定为3 000×800×700(长×宽×高,cm).肥料箱底部V型料仓的倾斜角计算公式:
tanθ=f
(2)
式中,f为肥料与钢板材料之间的摩擦系数,m3;θ为V型料仓的倾斜面与水平面之间的夹角,(°).取f=0.4,则θ=arc tanf=21.8°,取θ=30°.
2.2排肥器设计计算
根据农田施肥经验N、P、K的配比为1∶0.67∶0.23,对应的尿素、过磷酸钙和颗粒钾的每公顷施肥量约为440、680、117 kg.施肥机每公顷单种肥料的理论施肥量计算公式:
(3)
式中,S为1公顷的土地面积,m3;q为每分钟单个排肥器的排肥量,kg;N为每根排肥轴上排肥器的个数,本施肥机为5个;B为施肥机达到工作幅宽,m,本施肥机幅宽为3.5 m;V为施肥机的前进速度,km/h,取8 km/h;Qs取几种肥料中的最大值,此处取800 kg.代入相应的数值,则q取值为7.466 7 kg.
槽轮排出的肥料包括在槽轮槽齿的强制推动下经排肥口排出,该层颗粒肥料被称为强制层,以及处于槽轮槽齿外缘厚度为C的一层肥料颗粒由于颗粒间的摩擦力和槽齿对肥料颗粒的间断性冲击经排肥口排出,该层肥料被称作带动层.所以,排肥槽轮每转排肥量均是强制层和带动层的迭加,在槽轮有效工作长度固定的情况下,可以利用外槽轮排肥器的公式计算每分钟单个排肥器的排肥量q计算公式[10]:
(4)

其中d、L、f、t反映了排肥器的结构形状及三维尺寸,肥料容重γ取磷酸钙、颗粒钾、尿素3种肥料的堆密度分别为0.998、1.134、0.751 g/m3,肥料对凹槽的充满系数a(n)取0.8~0.9,带动层厚度c(n)取0.3~0.4 cm.由式(4)可知,这些参数都会对外槽轮排肥器的排肥量重要产生影响.确定外槽轮排肥器的外槽轮直径d为4.8 cm,外槽轮总长度为4.5 cm,槽轮齿数为6,槽轮凹槽的横截面积f为1.0 cm2,槽轮凹槽节距t为2 cm.
3 试验分析
3.1试验方法与材料
目前普遍施用的颗粒肥料为试验材料,考虑到对本施肥机的适用性,因此以新疆生产的过磷酸钙、颗粒钾、尿素和颗粒有机肥4种肥料.试验地点选在石河子大学机械电气工程学院校工厂内.对过磷酸钙、颗粒钾和尿素3种肥料分别进行不同的槽轮开度和转速的排肥试验,在每个排肥口处放置肥料收集器,每次进行60 s的排肥试验,收集肥料进行单独称质量,做好数据记录,每组试验做3次.
3.2试验结果与分析
对不同转速的排肥试验进行的是转速40~240 r/min,依次增加20 r/min的排肥试验,对不同开度的排肥试验进行的是开度分别为13、23、33、43 mm的排肥试验.本文中仅对过磷酸钙试验数据做出如下分析.
由表1为模型情况表,可以看出每个二次曲线模型相对于线性模型的R方都最高,也就是说模型对数据的解释能力最强,并且模型也是很显著的.所以,选择二次曲线模型,根据表1中的各变量的系数值,可以得出排肥开度速为13、23、33、43 mm时,数学模型分别为Q=-0.02x2+18.155x-8.358;Q=-0.028x2+28.904x+73.744;Q=-0.025x2+42.803x+85.133;Q=-0.057x2+55.195x-174.445.模型显著性系数都小于0.05,为显著,拟合优度很好,可决定系数都大于0.999.
图4-A至图4-B分别是开度为13、23、33、43 mm时对应不同转速下排肥量的2条曲线的拟合情况,图中的圆圈表示每个转速和开度组合下的实际排肥量的均值,实线代表线性拟合曲线,点画线代表二次拟合曲线,图中也可以看出二次曲线拟合效果好于线性拟合效果.从数学模型和拟合曲线都可以得出在开度不变的情况下,排肥量随着槽轮转速的提高而增加,但是二次拟合曲线的斜率是逐渐在减小的,说明排肥量不是随排肥槽轮转速的增加而成比例的增加,其增加量在逐渐减少,造成这种现象的原因可以归结为两个方面:一是随着槽轮转速的增加肥箱内的肥料没能及时的填充进入槽轮的凹槽,二是由于外槽轮排肥器排出的肥料可分为两部分(强制层和带动层),强制层处于槽轮的凹槽内,其多少由肥料对槽轮的凹槽的填充系数决定,带动层的多少由带动层特性系数决定,两者都是槽轮转速的函数.
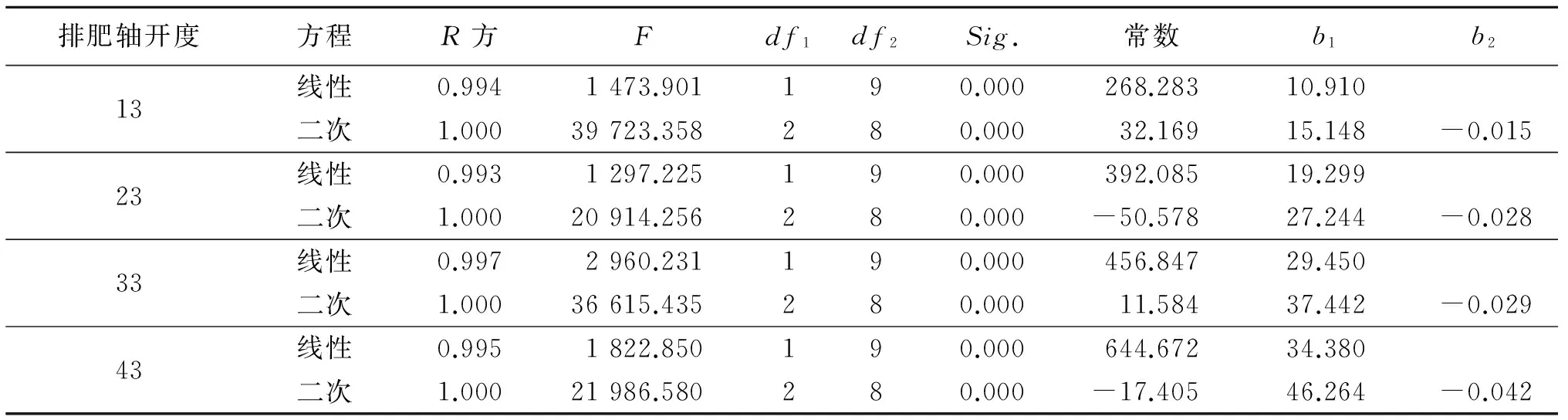
表1 模型情况表Tab.1 Model case table
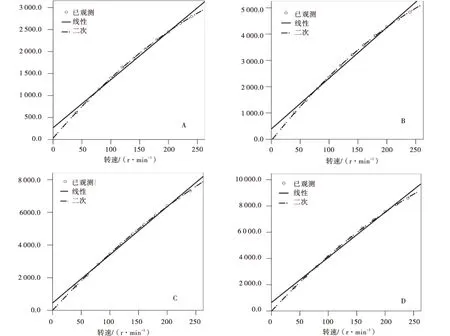
图4 不同开度下的排肥量拟合曲线Fig.4 Fitting curve of fertilizer amountunder different opening conditions
图5-A、图4-B分别是转速为60 r/min和120 r/min时对应不同开度下排肥量的线型拟合情况,图中圆圈表示转速为60 r/min和120 r/min时,不同开度下的实际排肥量的均值,在开度较小时圆圈位于拟合直线的下方,随着开度的增加圆圈逐渐靠近并位于拟合直线上方,开度继续增加圆圈又开始位于拟合直线的下方.可以得出在转速不变的情况下,排肥量随着槽轮开度的增加而增加,但是增加量存在先大后小,最后趋于平稳,造成这种现象的原因可以归结为与排肥器内壁接触的肥料的流动速度要低于中间肥料的流动速度,随着槽轮开度的增大,其对排肥量的影响将越来越小.
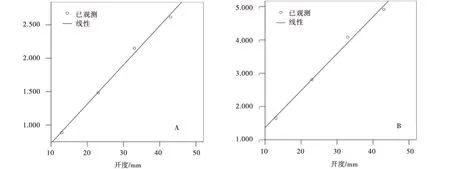
图5 不同转速下的排肥量拟合曲线Fig.5 Fitting curve of fertilizer amount under different speed4
4 结论
本文设计了一种以农民现在使用的农用拖拉机作为驱动源的变量施肥机,通过调节施肥机液压马达的转速与转向实现排肥轴的转速与槽轮开度的调节,从而达到改变施肥量的目的.
排肥试验表明,在开度不变的情况下,排肥量随着槽轮转速的提高而增加,但排肥量不是随排肥槽轮转速的增加而成比例的增加,其增加量在逐渐减少.
在转速不变的情况下,排肥量随着槽轮开度的增加而增加,但排肥量不是随排肥槽轮开度的增加而成比例的增加,其增加量存在先大后小,最后趋于平稳.
[1]段洁利,李君,卢玉华.变量施肥机械研究现状与发展对策[J].农机化研究,2011(5):245-248
[2]贾豪语,张国斌,郁继华,等.化肥与生物肥配施对花椰菜产量和养分吸收利用的影响[J].甘肃农业大学报,2013,48(5):36-42,49
[3]马旭,马成林,张书慧.变量施肥机及其应用的研究[C]∥中国农业机械学会.农业机械化与全面建设小康社会—中国农业机械学会成立40周年庆典暨2003年学术年会论文集,2003
[4]赵登峰,张立新,吴金林.变量施肥研究现状及在新疆棉花上的应用展望[J].农机化研究,2012(4):213-218
[5]张书慧,马成林,吴才聪,等.地理信息系统在精确农业变量施肥中的应用[J].农业机械学报,2003(3):92-95
[6]李世成,秦来寿.精准农业变量施肥技术及其研究进展[J].世界农业,2007(3):57-59
[7]王国伟,闫丽,陈桂芬.变量施肥对改善土壤养分空间差异性的综合评价[J].农业工程学报,2009,25(10):82-85,363
[8]王秀,赵春江,孟志军,等.精准变量施肥机的研制与试验[J].农业工程学报,2004,20(5):114-117
[9]李振,张立新,喻俊志,等.电控液压双变量施肥机排肥试验研究[J].农机化研究,2015(2):195-198
[10]韩云霞.2BFJ-6型自动变量施肥机控制系统研究[D].长春:吉林大学,2004
(责任编辑李辛)
Design and experiment of bivariate fertilizer
LI Kai,ZHANG Li-xin,ZHANG Li-ping,CHU Shi-zhe,QI Xiao-min,QIAN Ying,LI Ji-xia,GUO Zhen-hua
(College of Mechanical and Electrical Engineering,Shihezi University,Shihezi 832000,China)
【Objective】 In order to solve the problems,especially at the irrational structure of traditional fertilization,disproportionality of crops nutrient,low utilization rate of fertilizer and sever environmental pollution.【Method】 A kind of variable rate fertilizer applicator was designed,which used the structure of ‘one body,three boxes’ and the fertilizer ejection of the outer groove-wheel,which could match with the domestic tractor.The rotational speed and the opening degree of the outer groove-wheel were controlled to realize the variable rate fertilizer.【Result】 The amount of fertilizer increased in a nonlinear form when the rotational speed increases alone or the opening degree increase alone.【Conclusion】 This design solves the irrationality of the traditional fertilizer structure and offers reference for the purpose of improving the fertilizer accuracy of the applicator.
variable rate fertilizer applicator;bivariate control parameters;mathematical model
李凯(1988-),男,硕士研究生,研究方向为先进制造技术.E-mail:lk2014105007@163.com
张立新,男,教授,博导,主要从事机械制造及其自动化、农业机械化工程方面的教学及科研工作.E-mail:zhlx2001730@126.com
国家自然科学基金项目(51365048).
2016-01-12;
2016-04-01
S224.22
A
1003-4315(2016)04-0128-06
猜你喜欢
模具技术(2022年4期)2022-10-17 10:17:24
现代农村科技(2022年9期)2022-08-16 02:25:50
农业工程学报(2022年1期)2022-03-25 01:13:24
西安航空学院学报(2018年1期)2018-02-05 01:25:17
农产品加工(2016年16期)2016-09-27 09:32:30
江苏农机化(2015年6期)2015-12-07 11:58:18
农村百事通(2015年10期)2015-07-27 10:09:06
湖南农业科学(2014年20期)2014-02-27 14:32:55
湖南农业科学(2014年8期)2014-02-27 14:32:13
湖南农业科学(2014年5期)2014-02-27 14:29:53