
汽车电动天窗防夹分析
2016-09-26 09:05黄启海李永张华
汽车零部件 2016年2期
黄启海,李永,张华
(安徽江淮汽车股份有限公司,安徽合肥 230601)
汽车电动天窗防夹分析
黄启海,李永,张华
(安徽江淮汽车股份有限公司,安徽合肥 230601)
简单介绍了天窗防夹概念及防夹形式分类,以接触式防夹为主要研究对象,详细阐述了天窗的防夹基本原理及实现过程。基于静态防夹基本原理,提出了ATS算法的防夹原理,在控制过程中能够实时更新数据,补偿外界因素对防夹力的影响,从而提高防夹的精准性,防止产生防夹误判或防夹失效。
电动天窗;接触式防夹;防夹原理
0 引言
随着消费者对汽车要求的提高,汽车的乘坐舒适性越来越受到关注。汽车配置天窗,一方面可使室内透光性好,通风性好,视野开阔[1];另一方面,在高速行驶时,开天窗相对于开侧窗能有效降低车内噪声。因此,天窗已逐步成为一种汽车必备配置。
正因为天窗使用的普遍性,所以对于天窗的性能研究也逐渐成为热点。由于汽车天窗是一个车内部件,其正常使用关乎车内人员的安全,且现在越来越多的报道指出:电动天窗以及车窗会造成车内人员特别是小孩的误夹伤[2],所以文中对天窗的防夹功能展开研究,并通过ATS控制算法对天窗运行平稳性及防夹精准性进行改进。
1 天窗防夹简述
天窗防夹,就是指电动天窗在自动关闭过程中,遇到阻碍物体,并且运动阻力达到一定数值之后,天窗能够自动停止关闭动作并自动反方向开启,以防止物体(尤其是人体)被夹伤。
1.1 天窗防夹区域
天窗防夹有特定的防夹区域,如图1所示,从天窗开口4 mm到开口200 mm区域范围内为天窗防夹区域。当进入防夹区域时,如果电机转速大于防夹阀值时则需使用防夹保护措施,当天窗进入非防夹区域时,即使转速值大于防夹阀值,也无需启动防夹。这主要是为了防止天窗完全关闭时阻力过大造成误开启。
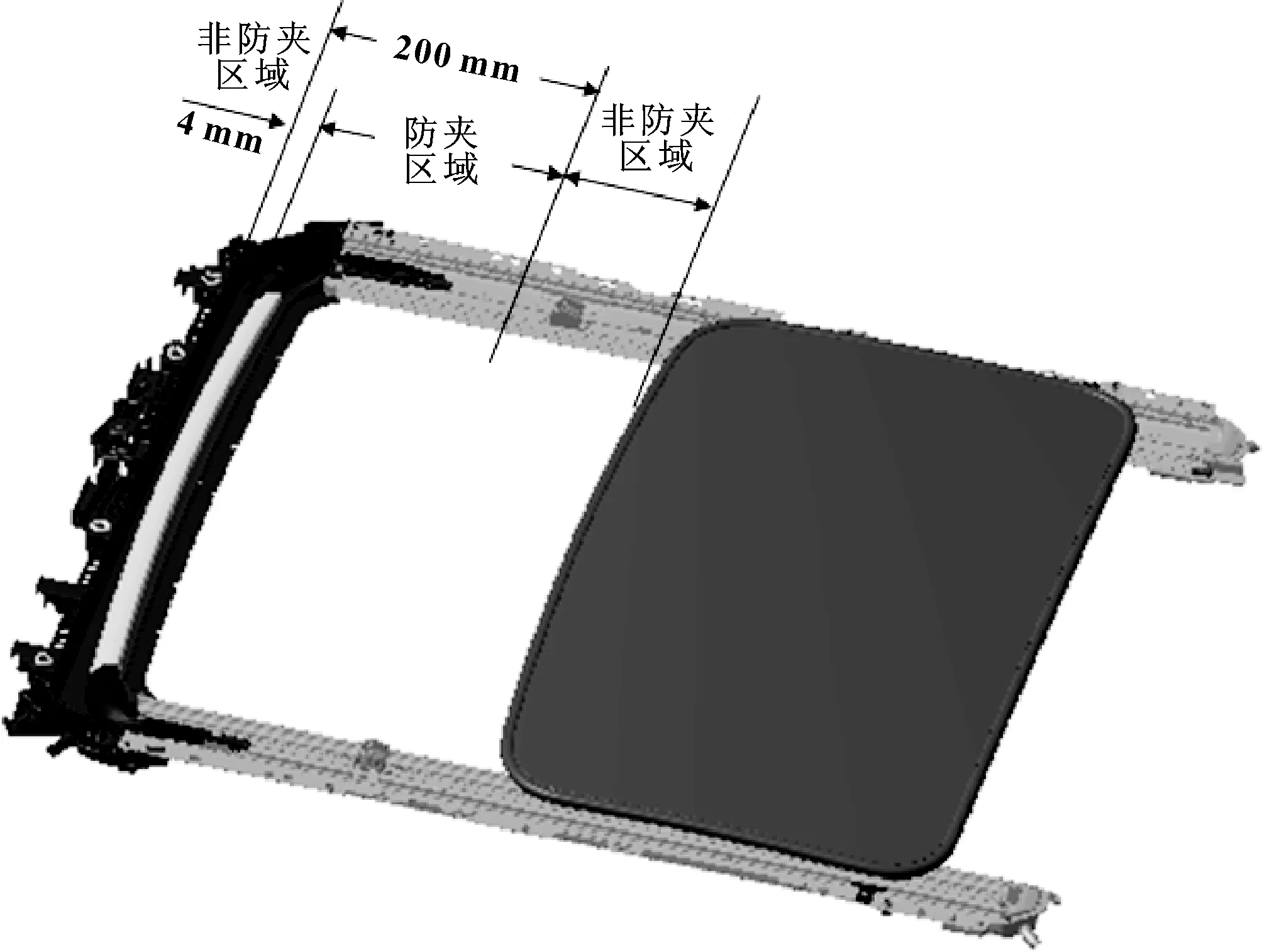
图1 天窗防夹区域
1.2 天窗防夹分类
天窗防夹方式主要有两种[3]:接触式和非接触式。
接触式防夹的天窗需要被夹物体与天窗接触,并给天窗一个力反馈。这种类型的天窗一般在电机上加装霍尔传感器,时刻监测电机的转速,并反馈给ECU。接触式防夹具体工作原理后面叙述。
非接触防夹的天窗主要是由安装在天窗两侧边框内的红外接收器和发生器组成,通过红外接收器发送给ECU信号从而判断是否需要防夹保护。和红外防夹电梯门的防夹原理相似,非接触防夹可避免物体支架被天窗夹持,防止人员的夹伤。但此方法很容易造成误操作,例如:当天窗关闭过程中存在某些异物并不需要防夹,非接触式防夹很容易误判断为需要防夹;由于清理不及时导致天窗边框灰尘多使得红外传感信号错误,从而导致误防夹判断。此外,非接触式防夹成本较高。
综合考虑防夹性和使用性能及成本,目前市场上普遍使用的是接触式防夹天窗。接下来,主要介绍接触式防夹天窗的防夹原理。
2 天窗防夹原理
2.1 天窗电机及控制器的工作原理
天窗电机及控制器内集成有能够检测位置的磁环和霍尔传感器[4],通过软件对霍尔传感器的信号进行检测,能够计算出精确的机械部件(玻璃板或遮阳板)的位置。电机及控制器的工作原理如图2所示。

图2 电机及控制器的工作原理
以电机输出齿轮旋转1周为例:拉索运行48.26 mm,产生260个霍尔脉冲信号,每个脉冲对应0.18 mm;以玻璃板翘起为例:电机旋转大约1圈半,拉索运行65 mm,产生350个霍尔脉冲信号。
在实现以上功能的基础上,按照不同天窗的要求制订按键逻辑和天窗操作规范。
控制器软件功能:
应用层基本功能 (正常工作模式和错误处理模式);
计算玻璃应该停留的位置;
检测电机电流,消除任何情况的堵转和大电流;
实现防夹功能;
诊断和识别;
一键自动操作功能;
能够对天窗的不同情况进行自学习;
SCU内的程序可以进行在线更新;
电源处理,温度处理;
天窗的初始化;
霍尔传感器脉冲计数,位置计算,电流计算,防夹力计数。
2.2 天窗防夹基本原理
2.2.1 防夹力模型
根据前面介绍的马达工作原理,作者建立了如下简易受力模型:
静态情况下(忽略系统的惯性;忽略系统的动态影响),模型可简化为:
Fpe=Fm-Fr
式中:Fpe为预估防夹力;Fm为电机输出力;Fr为系统阻力。静态防夹受力模型如图3所示。
2.2.2 防夹实现过程
天窗在关闭过程中,如果有异物在开口部被夹时,发生夹持。夹持发生时,玻璃受到夹持力Fpe,导致驱动电机的负荷力Fm增加,电机转速降低。电机转轴上装有磁石,电机转速降低,导致磁石的转速也降低。为了检测马达的转速,在转轴上装有磁石,马达转动时会带动磁极“S”和“N”的变化。通过ECU基板上安装的IC,将磁极“S”和“N”的变化转换为脉冲波形,从而换算出电机转速[5]。转速脉冲转化过程如图4所示。
当发生夹持时,电机转轴转速下降,脉冲波形的周期T变宽。通过脉冲波形的周期T可计算出电机转速Vrpm。发生夹持时波形周期的变化如图5所示。
电机转速
vrpm=[1/(Tn/1 000)]×60
例:如果Tn=5 ms→1 s转200圈 →60 s转12 000圈⟹vrpm=12 000 r/min。
当ECU检测出马达转速下降后,如果下降幅度超过一定值(阈值),即判定为夹持发生,见图6。

图6 系统判断夹持的示意图
以上防夹力模型及防夹实现过程是在汽车静止状态下忽略系统惯性及系统动态影响的理想状态,但实际过程中可能会有其他因素导致防夹误判或防夹失效。接下来介绍一种ATS算法,考虑系统的动态因素、车速、温度等条件,可以提高防夹的精准性,使天窗运行更加平稳,防止产生防夹误判或防夹失效。
3 基于ATS算法的防夹原理
3.1 动态防夹力模型
动态防夹力模型如图7所示。

图7 动态防夹受力模型
动态情况下,考虑系统的惯性及系统的动态影响,防夹力模型为:

3.2 ATS算法
(1)ATS算法需要的输入数据和输出数据如图8所示。

图8 ATS算法需要的输入数据和输出数据
(2)ATS算法中需要的输入数据和输出数据的意义和作用如表1所示。
(3)ATS算法控制逻辑图如图9所示。

表1 ATS算法中数据的意义和作用

图9 ATS算法制逻辑图
3.3 ATS算法原理概括
在没有障碍物引起天窗启动防夹功能时,天窗的阻力等于电机的驱动力。ECU通过对天窗的初始化过程和自学习过程来计算并存储电机的正常驱动力。
1)目前我国套管气回收工艺面临的主要问题。高压套管气采集过程中会因为节流、吸热而产生轻质油和水合物。因此,回收套管气装置必须配置防冻、堵功能。
当天窗ECU收到的阻力大于一定数值的时候,天窗会认为可能有障碍物,并启动障碍物检测功能,立即计算出天窗受到的阻力。当天窗检测到阻力大于ATS阈值后,天窗会认为这就是障碍物,但并不立即启动ATS防夹功能。当天窗运行到ATS安全区域之内时(4~200 mm),就会立即启动ATS功能,停止天窗的运动并向相反的方向后退,确保安全。
增加了ATS算法的意义即能够使天窗控制程序实时更新数据,并补偿外界因素的影响,使计算程序得到的数据更准确,实现防夹更精准。此算法的防夹原理在某SUV车型上已应用并得到验证,能够很好地实现防夹,并且防夹力都在设定的范围内。
4 总结
首先介绍了天窗防夹概念及防夹形式分类,以接触式防夹为主要研究对象,详细阐述了天窗的防夹基本原理及实现过程。基于静态防夹基本原理,提出ATS算法的防夹原理,在控制过程中能够实时更新数据,补偿外界环境因素对防夹力的影响,从而提高防夹的精准性,使天窗运行更加平稳,防止产生防夹误判或防夹失效。
【1】张志敏,陶永琴.基于嵌入式系统的智能汽车天窗的设计[J].电子测试,2013(11):5.
【2】许小侠,赵静斌.基于虚拟样机的轿车天窗运动机构的设计[J].机械工程学报,2008,44(9):225-229.
【3】马加其.防夹电动窗的改进[J].湖北汽车工业学院学报,2007,21(3):79-80.
【4】马伟泽,张申科.采用霍尔传感器的汽车电动窗防夹设计[J].汽车工程,2008,30(12):1122-1124.
【5】周易.汽车电动车窗防夹系统的研发[J].北京汽车,2007(4):31-34.
Analyses on Electric Sunroof Anti-pinch
HUANG Qihai,LI Yong, ZHANG Hua
(Technical Center,Anhui Jianghuai Automobile Co.,Ltd., Hefei Anhui 230601,China)
The concept and the forms of sunroof anti-pinch were introduced. The basic principles and implementation process of the contact type anti-pinch were elaborated. ATS algorithm was proposed based on principle of static anti-pinch to achieve data updating in time and compensate the impact on pinch force caused by external factors during the control process. On one hand, the precision of the anti-pinch can be improved; on the other hand, the misjudgment and failure of the anti-pinch can be prevented.
Electric sunroof; Contact type anti-pinch; Principle of anti-pinch
2015-11-26
黄启海(1984—),男,本科,工程师,从事内外饰设计研发工作。E-mail:hqh367@163.com。
U463.85+3
B
1674-1986(2016)02-048-04
猜你喜欢
振动与冲击(2022年19期)2022-10-17
房地产导刊(2021年12期)2021-12-31
军民两用技术与产品(2021年7期)2021-10-13
青年文学家(2021年21期)2021-09-05
皮肤病与性病(2021年3期)2021-07-30
中国科学院大学学报(2021年1期)2021-01-14
作文周刊·小学四年级版(2021年4期)2021-01-13
劳动保护(2019年7期)2019-08-27
汽车维护与修理(2017年7期)2017-02-06
环球时报(2010-01-13)2010-01-13
