
基于XC型PLC控制的运动控制系统设计与制作
2016-09-23 06:33:21江凌云
绥化学院学报 2016年9期
江凌云
(无锡商业职业技术学院机电技术学院 江苏无锡 214153)
基于XC型PLC控制的运动控制系统设计与制作
江凌云
(无锡商业职业技术学院机电技术学院江苏无锡214153)
文章使用XC型PLC、触摸屏、变频器、接近开关等,构建运动控制系统,编制PLC控制程序和HMI画面程序,实现低成本的位置反馈控制和速度控制。对于运动控制系统的研制,有一定的参考价值。
运动控制系统;PLC;多段速;高速计数;变频器;触摸屏
运动控制是工业控制中关键的单元技术,是实现FA(工厂自动化)的核心要件。使用控制电机(步进、交流伺服、直流伺服电机)配合伺服驱动器实现较精密运动控制,和使用异步电机、变频器、HMI等实现低成本运动控制是目前两种主流的运动控制系统解决方案。目前国内外都有基于主流PLC的运动控制系统,但价格昂贵。信捷公司是无锡较大的一家能提供自动化产品的企业,产品性价比高。利用国产设备实现运动控制,既能降低实训装备成本,又能提高师生的实践动手能力,进一步推进开放实验室建设和校企合作。
一、总体设计
本项目使用XC型PLC控制变频器对普通电机实现调速控制,通过对旋转编码器、接近开关的信号反馈实现低精度的位置控制,通过触摸屏提高控制的自动化程度。本项目的结构原理框图如图1:
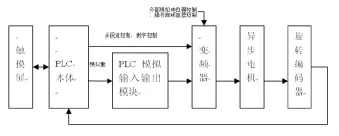
图1 运动控制系统结构原理框图
二、硬件选型及安装
本系统通过信捷TH系列触摸屏(型号TH765-M)实现运动控制,因此需要很少的输入点数,使用信捷XC系列可编程控制器(型号XC3-24RT-E)就可以满足要求;本系统中使用的是小型异步电机,功率不大,因此使用信捷V5变频器就能拖动负载;因为系统中需要实现高速测量距离的功能,要对异步电机进行实时高速计数,故使用了旋转编码器;因为本系统同时可以使用模拟电压信号对变频器进行控制,故使用了信捷XC系列扩展模块(型号XC-E4AD2DA)进行模拟量的输出控制。为了实现基本的限位、保护功能,选用了4只接近开关、2只行程开关。具体详见运动控制系统的接线原理图。
本系统中使用变频器进行调速。变频器的接线逻辑如图2所示:
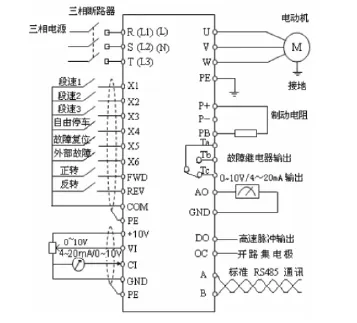
图2 变频器的接线逻辑
本设备用到了X1,X2,X3端子控制频率,FWD,REV端子控制正反转,CI,GND模拟量给定频率及带动异步电机。在本实验装置中,可以演示以下几种变频器操作方式:通过模拟电位计调整变频器频率;通过PLC控制变频器实现多段速调速;通过触摸屏设定频率,实现调速。
在本设计中,变频器参数P0.01设为6,即CI模拟给定,P0.03设为1,即端子给定运行命令,其他都为默认值。Y0,Y1,Y2对应X1,X2,X3控制七段频率给定。Y3,Y4控制FWD,REV正反转。
三、软件编程与调试
(一)高速计数。旋转编码器发出的高速脉冲信号由PLC进行计数,XC系列PLC具有与可编程控制器扫描周期无关的高速计数功能,通过选择不同计数器来实现针对测量传感器和旋转编码器等高速输入信号的测定,其最高测量频率可达80KHz。在本项目中使用了AB相模式,高速计数值依照两种差分信号(A相和B相)进行递增或递减计数,根据倍频数,又可分为一倍频和四倍频两种模式,但其默认模式为四倍频模式。按图3进行高速计数输入端口分配:
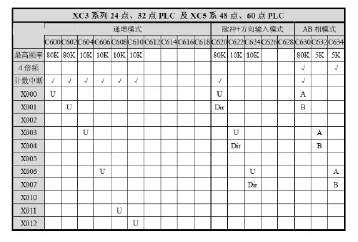
图3 高速计数输入端口分配图
本例中使用X0、X1作为A、B相输入,用C630进行高速计数,程序逻辑如图4所示:
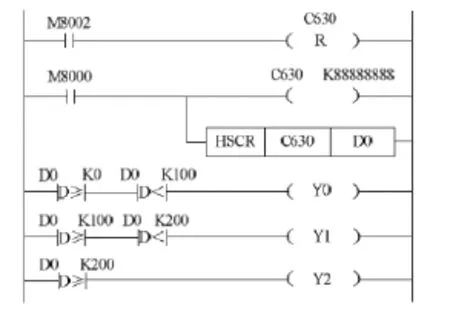
图4 高速计数实现逻辑
由于单字带符号寄存器计数范围为-32768~32767,故当计数值较大时,需采用双字寄存器。本试验中用于记录位置的寄存器均为双字。
(二)HMI的画面程序设计(见图5)。

图5 画面设计
(三)PLC程序设计与调试。本运动控制系统的命令语程序(相当于其他型号PLC的指令表语言)如图6所示:
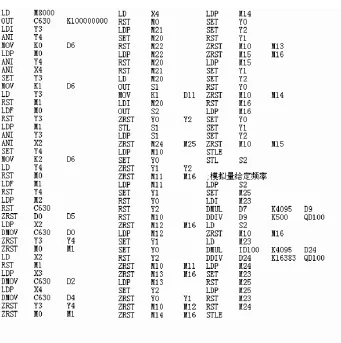
图6 命令语(指令表)
四、运动控制系统的使用
通过触摸屏画面中下端两个指示灯按钮,可以选择频率给定方式。当选定模拟量给定频率时,可进一步选择屏幕输入数据或电位器给定。当屏幕给定时,可输入一个0-50HZ的频率,PLC程序将其处理为对应0-4095的数字量,从模块的VO通道输入给变频器。当选择电位器给定时,可通过试验台上的电位器旋钮,增大或减小电压量的大小,再将其转化为数字量以同样原理传送给变频器频率通道。当选择为端子给定频率时,模拟量给定频率通道即失去作用。虽然变频器参数设置时,频率给定通道为CI模拟量给定,但当有端子给定频率时,端子给定优先,所以在一种设置下,就可实现端子及模拟量两种频率给定方式。
按下正转按钮或反转按钮时,小车就会相应动作。当正转时,会互锁反转按钮,反转按钮不起作用;反转时亦如此。当小车运动时,旋转编码器随时记录其运动数值。当经过3个接近开关时,会将当时的记数值,放入对应的寄存器中并显示出来,通过计数清除按键可以清除计数。当到达左右两极限位置时,小车会自动停止。当出现特殊情况,小车碰到极限位置的行程开关时,行程开关由常闭变为常开,使得交流接触器线圈断电,停止整个试验台的供电,达到保护功能。
五、结语
本项目使用国产新型PLC作为控制器,实现低成本的运动控制方案,推进了工学结合、校企合作,提高了学生的PLC编程和触摸屏画面设计等实践操作技能。另外,该实训装置涉及到变频器的基本功能,可以使学习者初步了解变频器的作用及使用方法。另外还涉及到旋转编码器的高速计数,这在工业控制中也很实用。
[1]叶军,于霞.基于GE Fanuc PLC和DSM324i的运动控制系统[J].煤炭机械,2011(8).
[2]陈卫东,韩兵.运动控制系统课程体系改进与创新[J].实验室研究与探索,2013(9).
[3]孙岚,李洪群.信捷PLC在键盘剪刀脚整理台控制系统上的应用[J].自动化技术与应用,2012(12).
[4]郭庆云.仿真软件在PLC控制系统设计中的应用[J].北京印刷学院学报,2010(6).
[5]石佳福.MCGS组态软件在粗纱机远程监控系统中的应用[J].纺织机械,2011(3).
[责任编辑郑丽娟]
Motion Control System Designand Implementation Basedon Control of XCPLC
Jiang Lingyun
(Wuxi Vocational Institute of Commercial Technology,Wuxi 214153)
In this project, using the equipments with XC PLC, touch screen, frequency converter, proximity switch, we constructed a motion control system. PLC control program and HMI screen program was developed to realize the systemwhich can achieve low cost control targets on position feedback control and speed control
motion control system;PLC;multi-speed;high-speed counting;frequency transformer;touch screen
TP393
A
2095-0438(2016)09-0155-03
2016-05-07
江凌云(1976-),男,安徽桐城人,无锡商业职业技术学院机电技术学院讲师,硕士,研究方向:机电一体化技术及工控技术。
猜你喜欢
纺织报告(2024年1期)2024-02-27 06:53:52
China Textile(2022年3期)2022-07-12 05:37:36
华人时刊(2020年21期)2020-11-17 11:28:32
装备制造技术(2019年12期)2019-12-25 03:06:36
城市公共交通(2019年5期)2019-07-12 08:43:58
测控技术(2018年12期)2018-11-25 09:37:42
知识就是力量(2018年7期)2018-07-11 06:39:56
电子制作(2016年21期)2016-05-17 03:53:12
电测与仪表(2015年11期)2015-04-09 11:46:30
铁路通信信号工程技术(2014年5期)2014-02-28 16:57:49
