
基于FY-2E数据白天海雾检测算法的改进
2016-09-22 01:10:01田永杰邓玉娇陈武喝王捷纯
干旱气象 2016年4期
田永杰,邓玉娇,陈武喝,王捷纯
(1.华南理工大学电信学院,广东 广州 510640;2.广东省生态气象中心,广东 广州 510640)
基于FY-2E数据白天海雾检测算法的改进
田永杰1,邓玉娇2,陈武喝1,王捷纯2
(1.华南理工大学电信学院,广东广州510640;2.广东省生态气象中心,广东广州510640)
根据各类云层、雾和下垫面的光谱辐射特性和云雾的空间纹理,在前人研究基础上,采用面向对象的方法,构建一系列判别指数,建立一套有效的海雾检测算法进行FY-2E数据白天海雾的判识,并将该方法应用到2014年4月8日黄海中北部一次海雾的动态变化过程。2014年4月8日高时间分辨率的海雾检测个例应用表明,本文提出的白天海雾检测算法可较好地实现海雾过程的动态监测。另外,结合FY-3B雾产品数据进行算法的精度检验,11次海雾个例的精度检验结果显示,命中率(POD)为90.9%,误报率(FAR)为33.2%,临界成功指数(CSI)为62.6%,表明该方法有效、可行。
FY-2E;海雾;动态阈值;云雾分离
引 言
海雾是海上一种常见的灾害性天气,它使能见度降低,严重影响海上交通、海洋作业等,对国民经济、人民生命财产安全造成影响,因此对于海雾的监测和预警十分必要。常规的海雾监测手段是依靠沿海城市和部分岛屿上设置的地面气象观测站点进行监测。由于受地理因素的影响,设置的气象站点十分有限,且分布不均,难以对海雾进行全面的观测。卫星遥感技术具有实时、动态、覆盖范围广、信息源可靠等优势,能够客观地对海雾进行识别监测,特别是静止卫星具有时间分辨率较高的优点,能够对海雾事件进行连续动态性观测,可用于海雾的形成和消散规律的研究,进而可以更加准确地进行海雾预报。
卫星遥感技术对大雾的自动检测,按时间可分为夜间雾检测和白天雾检测。夜间雾的检测,主要是根椐下垫面、云和雾在3.7 μm和10.7 μm波段的不同辐射特性,利用这2个波段的亮温差来实现雾区提取[1-3],并已成功实现了业务化。而白天雾的检测,由于3.7 μm通道的辐射既包含目标物自身的长波辐射,又包含反射的太阳短波辐射,亮温差法在识别白天大雾时判识精度将大大降低。在白天雾检测中,由于云雾区和下垫面在可见光波段的反射率存在较大差异,人们常采用固定反射率阈值方法来分离下垫面和云雾区[4-6]。然而,可见光波段的反射率随不同季节和时次变化而有所偏差,使用固定反射率阈值的方法可能会造成较大误差。Alan等[7]2002年提出了自动判识云区与地面的基于直方图统计的动态阈值法,且刘希[8]、郝增周[9]等都使用此方法成功进行了下垫面和云区的分离,但此方法是运用差分方法来求解阈值点,当数据异常时,往往会造成阈值点存在一定的偏差。因此,针对上述不足,在前人研究基础上[10-17],根据下垫面、云和雾的光谱辐射特性和云雾的空间纹理特性[18-21],采用面向对象的方法,建立一套有效的基于直方图曲线拟合的动态阈值法来进行白天海雾判识,并将该方法应用到高时间分辨率的FY-2E卫星黄海中北部一次海雾动态变化过程的监测研究。
1 资料及预处理
所用资料为国家卫星气象中心提供的FY-2E数据和FY-3B雾产品数据,可从国家卫星气象中心风云卫星遥感数据服务网(http://satellite.cma.gov.cn/portalsite/default.aspx)下载。FY-2E数据包括5个通道,分别为2个长波红外通道(IR1,10.3~11.3 μm;IR2,11.5~12.5 μm)、水汽通道(IR3,6.3~7.6 μm)、中波红外通道(IR4,3.5~4.0 μm)、可见光通道(VIS,0.55~0.90 μm),中心经纬度为0°、104.5°E,星下点空间分辨率为5 km。资料的预处理包括辐射定标、投影转换和陆地掩膜。辐射定标,是把原始数据的DN值定标为各通道的亮温或反射率;投影转换,是把研究区域的卫星数据投影转换成UTM投影数据;陆地掩膜,是利用海陆模板把陆地区域剔除。
2 海雾判识算法
根据云、雾和下垫面的光谱辐射特性可知:在可见光波段,云雾的反射率较高,且云的反射率通常高于雾的反射率,而各类地表和水体反射率一般较低;在长波红外波段,中高云亮温明显低于低层云雾,而下垫面的亮温最高;在中红外波段,雾的亮温通常最高,低云次之,下垫面介于低云和中高云之间。另外,雾的纹理较云区更加均匀平滑,且雾贴近地面,雾顶高度较低。本文的海雾判识算法以雾的光谱特性为基础,结合其空间纹理特性,构建一系列的判识指数,逐步实现云雾与海面分离、中高云与低层云雾分离、低云与雾区分离。图1为白天海雾判识流程,其中,RVIS表示可见光波段的反射率,H为云顶高度,FDI[10]和PCDI为海雾判识指数,Q为平滑稳定度,T1、T2、T3、T4、T5分别为5个步骤的判识阈值。
2.1动态阈值区分海面与云雾区
目前云地分离技术主要有3类:阈值法、聚类分析、人工神经网络,其中阈值法是相对成熟、易于实现的一种方法。本文基于Alan[7]、刘希[8]等方法的基础上做进一步改进,即对可见光波段反射率的统计直方图进行最小二乘法曲线拟合,使数据更加平滑,避免一些异常数据造成的误差。大量试验得出,当直方图的统计间距取0.6、最小二乘法拟合阶数取10时,能得到较好的拟合结果。然后对直方图拟合曲线进行二阶求导。由于海面的可见光反射率≤25%,可求算0~25%反射率区间范围内二阶导数的最大值点,该最大值点所对应的反射率即为区分下垫面与云区的反射率阈值。考虑全云覆盖的影响,若求得的反射率大于海洋晴空像元上限18%,阈值设为默认值12%。反射率大于该阈值的设为云区像元,反之为晴空像元。
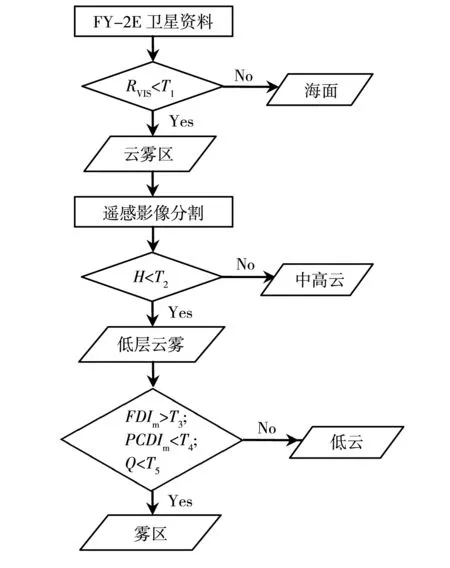
图1 白天海雾检测算法流程
图2为利用上述改进的动态阈值法对2014年2月26日11:00(北京时,下同)中国附近海域海雾的求解过程,求得的动态阈值点为图2d中的b点,其阈值对应b点的可见光反射率。而采用差分方法求算的阈值点为图2a中的a点,但实际斜率变化最大的点应该在b点附近,这是因为在a点附近出现了异常值。因此,根据直方图曲线拟合的动态阈值法,可减小由于数据异常而引起的误差,但同时会造成运算量增大,处理时间增加。
2.2高度区分中高云与低层云雾
对于中高云与低层云雾,由于FY-2E的长波红外波段IR1(10.7 μm)位于大气窗区,且辐射能量绝大部分是自身的热辐射,反射太阳辐射部分可忽略不计,因此该波段的亮温可近似模拟云雾顶温度。根据云区和晴空区的亮温差和大气温度垂直递减率(0.65 K·(100 m)-1),云顶高度估算公式为:
(1)
式中,H为云顶高度(m);BTcr(IR1)为待判识像素IR1波段晴空像素的亮温均值(K)。若该纬度区域被全云覆盖或晴空像素少于50个,则取前5 d同一时间晴空像元的均值(下同);BTcd(IR1)为含云像素在IR1波段的亮温均值(K)。如果H大于阈值2 000 m[13],判定为中高云,反之,则判定为低层云雾。
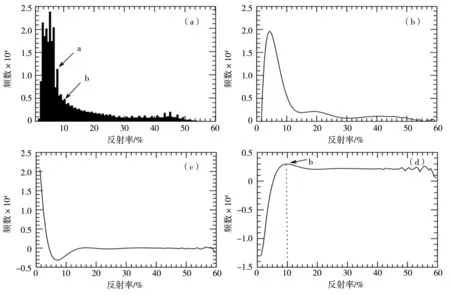
图2 基于改进的动态阈值法的2014年2月26日11:00中国附近海域海雾检测过程(a)直方图统计;(b)曲线拟合;(c)一阶导数;(d)二阶导数
2.3双指数区分低云与雾
低云与雾的判识历来是海雾遥感自动监测中的难点。由于在IR1和IR4波段低云和雾区的光谱特性差别较大,因此,尝试通过均值漂移算法对低层云雾进行聚类。聚类过程采用IR1和IR4波段,设定检测对象的像元数最小为20;然后运用海雾与低云分离指数、平滑稳定度逐步判识,最终实现低云与海雾的分离。
2.3.1分离指数
李维等[10]研究表明,在VIS波段,高云、中云、低云和雾的反射率逐渐降低,而在IR4波段反射率逐渐增大。利用雾判识指数FDI可较好地区分低云和雾,FDI计算公式:
(2)
其中,RVIS为VIS波段的反射率,RIR4为IR4 波段的反射率。由于薄低云在VIS波段反射率也较小,所求得的FDI指数较大,容易被误判为雾,故该方法对薄低云的检测效果较差。因此,在此基础上构建薄低云的检测指数PCDI,以提高雾的检测精度。
相对于雾,薄低云在长波红外波段IR1与晴空区的亮温差较大,而在中波红外波段IR4与晴空区的亮温差较小,且IR4与IR1的亮温差也较小。据此构建的薄云检测指数PCDI:
(3)
式(3)中,BTcd(IR1)、BTcd(IR4)分别表示IR1、IR4波段含云像素的亮温均值(K),BTcr(IR1)、BTcr(IR4)分别表示IR1、IR4波段晴空像素的亮温均值(K)。大量试验得出,若PCDI的均值>2.5,则判定为是薄低云。
2.3.2平滑稳定度指数
周红妹等[17]研究表明,与低云相比,雾有清晰光滑的边界、内部分布均匀、灰度值域波动稳定,纹理平滑,因此可利用平滑稳定度分析来达到区分雾和低云的目的。平滑稳定度Q的计算公式为:
(4)
式(4)中:Q为平滑稳定度,xi为IR1波段的像元亮温值(K),n为像元数。当Q>2.5时,检测对象为低云;Q<2.5时,则检测对象为雾[13]。
3 海雾检测精度检验
由于海上监测站点稀少,缺乏实测数据对海雾检测精度进行验证。极轨卫星FY-3B拥有10个可见光、红外通道,星下点空间分辨率均为1 km,通道数的增加和分辨率的提高,使得FY-3B数据进行的雾检测结果更加准确,因此,采用国家卫星气象中心发布的FY-3B雾产品数据对本文海雾检测结果进行精度验证。评定指标包括命中率(POD,Probability of Detection)、误报率(FAR,False Alarm Ratio)和临界成功指数(CSI,Critical Success Index)[13],公式如下:
(5)
式中,NH表示FY-2E检测结果和FY-3B雾产品都为雾的像素点频数,NM表示FY-2E检测结果无雾而FY-3B雾产品有雾的像素点频数,NF表示FY-2E检测结果有雾而FY-3B雾产品中无雾的像素点频数。
4 实例和结果分析
图3为FY-2E卫星数据2014年4月8日08:00—15:00黄海中北部一次大雾事件的逐时检测结果。从图3可知,4月8日08:00,黄海中北部出现大范围连片的海雾天气,面积约为18.0×104km2;
随后海雾一直呈持续稳定发展状态,至10:00,雾区面积约增至为20.0×104km2;之后雾区边缘开始慢慢消散,仅有西北边缘有所发展,至12:00覆盖面积约减为19.7×104km2;随着边缘的逐渐消散,至14:00黄海中北部雾区已分裂成2块;15:00,黄海中北部的雾区范围明显缩小,但在东海北部区域又有小块新的雾区形成。
基于FY-3B雾产品,对选取的FY-2E卫星数据11次海雾个例进行精度评定(表1),发现命中率(POD)为90.9%,误报率(FAR)较高为33.2%,原因是有一部分海面或低云被误判识为雾区;临界成功指数(CSI)为62.6%。说明本文提出的FY-2E白天海雾检测方法是有效、可行的。
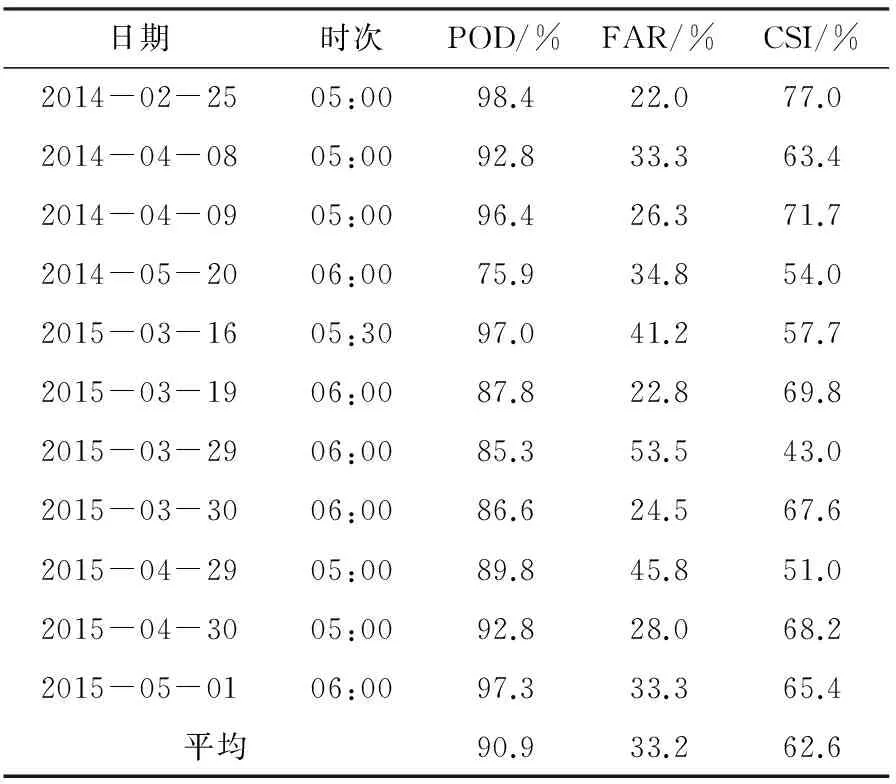
表1 FY-2E海雾检测结果检验
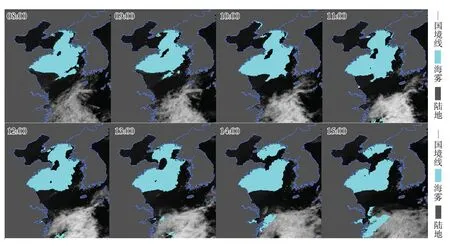
图3 2014年4月8日08:00—15:00 FY-2E卫星数据海雾检测逐小时演变
5 结论与讨论
(1)根据下垫面、雾和各类云层在FY-2E的长波红外波段IR1、中红外波段IR4、可见光波段VIS的光谱特性差异以及云、雾的纹理特征,提出白天海雾检测算法。对Alan等的动态阈值法[7]的改进,避免因数据异常造成的误差,使检测结果更加准确;通过高度分析实现了中高云和低层云雾的分离;通过引入薄低云检测指数,弥补了FDI指数对于薄低云检测效果较差的缺点,并结合平滑稳定度分析,可较好地分离低云和海雾。
(2)利用FY-3B雾产品数据对FY-2E海雾检测结果进行精度检验,命中率(POD)为90.9%,误报率(FAR)为33.2%,临界成功指数(CSI)为62.6%。说明本文提出的FY-2E白天海雾监测方法有效、可行。
由于FY-2E资料不具备云层穿透性,本文提出的白天海雾检测方法只适用于单层云雾,若出现云层覆盖于雾区之上的情况,则检测结果是上层云区。因此,该方法无法检测出被云层覆盖的海雾。此外,未考虑耀斑影响,若存在耀斑区,检测结果较差。
[1] Hunt G E. Radiative properties of terrestrial clouds at visible and infra-red thermal window wavelengths[J]. Quarterly Journal of the Royal Meteorological Society, 1973,99(420):346-369.
[2] Eyre J R, Brownscombe J L, Allam R J. Detection of fog at night using Advanced Very High Resolution Radiometer (AVHRR) imagery[J]. Meteorological Magazine, 1984,113(1346):266-271.
[3] Ellrod G P. Advances in the detection and analysis of fog at night using GOES multispectral infrared imagery[J]. Weather and Forecasting, 1995,10(3):606-619.
[4] 居为民,孙涵,张忠义,等. 卫星遥感资料在沪宁高速公路大雾监测中的初步应用[J]. 遥感信息, 1997,(3):25-27.
[5] 李亚春,孙涵. 用GMS-5气象卫星资料遥感监测白天雾的研究[J]. 南京气象学院学报, 2001,24(3):343-349.
[6] 邓玉娇,王捷纯,曹静. 基于MODIS遥感资料监测南海白天雾[J]. 热带气象学报, 2013,29(6):1046-1050.
[7] Alan V D V, William J E. An automated, dynamic threshold cloud-masking algorithm for daytime AVHRR images over land[J]. Geoscience and Remote Sensing, 2002,40(8):1682-1694.
[8] 刘希,徐建民,杜秉玉. 用双通道动态阈值对GMS-5图像进行自动云检测[J]. 应用气象学报, 2005,16(4):434-444.
[9] 郝增周. 黄、渤海海雾遥感辐射特性及卫星监测研究[D]. 南京:南京信息工程大学,2007.
[10] 李维,刘良明,杜娟. 针对FY-2E影像的白天雾检测研究[J]. 计算机工程与应用, 2012,48(8):4-7.
[11] Lee T F, Turk F J, Richardson K. Stratus and fog products using GOES-8-9 3.9-μm data[J]. Weather and Forecasting, 1997,12(3):664-677.
[12] Bendix J, Thies B, Cermak J, et al. Ground fog detection from space based on MODIS daytime data—a feasibility study[J]. Weather and Forecasting, 2005,20(6):989-1005.
[13] Cermak J, Bendix J. A novel approach to fog/low stratus detection using Meteosat 8 data[J]. Atmospheric Research, 2008,87(3):279-292.
[14] Ishida H, Miura K, Matsuda T, et al. Scheme for detection of low clouds from geostationary weather satellite imagery[J]. Atmospheric Research, 2014,143:250-264.
[15] Yi L, Zhang S P, Thies B, et al. Spatio-temporal detection of fog and low stratus top heights over the Yellow Sea with geostationary satellite data as a precondition for ground fog detection—A feasibility study[J]. Atmospheric Research, 2015,151:212-223.
[16] 吴晓京. FY-2C静止气象卫星资料大雾判识方法研究[A]. 中国气象学会2007年年会气象综合探测技术分会场论文集[C], 2007.
[17] 周红妹,葛伟强,柏桦,等. 气象卫星大雾遥感自动识别技术研究[J]. 热带气象学报, 2011,27(2):152-160.
[18] 郑炜,杨军,刘端阳,等. 南京冬季辐射雾雾水沉降特征研究[J]. 干旱气象,2014,32(1):52-59.
[19] 郝增周,潘德炉,龚芳,等. 海雾的遥感光学辐射特性[J]. 光学学报,2008,28(12):2420-2426.
[20] 孙涵,孙照渤,李亚春. 雾的气象卫星遥感光谱特征[J]. 南京气象学院学报, 2004,27(3):289-301.
[21] 汤鹏宇,何宏让,阳向荣. 大连海雾特征及形成机理初步分析[J]. 干旱气象,2013,31(1):62-69.
Algorithm Improvement of Sea Fog Detection in the Daytime Based on FY-2E Data
TIAN Yongjie1, DENG Yujiao2,CHEN Wuhe1, WANG Jiechun2
(1.SchoolofElectronicandInformationEngineering,SouthChinaUniversityofTechnology,Guangzhou510640,China; 2.GuangdongEcologicalMeteorologyCenter,Guangzhou510640,China)
According to the spectral radiation characteristics of clouds, fog and underlying surface and texture features of clouds and fog, combined with the previous studies, a series of discriminant indexes were established by using object-oriented method, firstly. Then, the algorithm was constructed to detect sea fog from FY-2E data in the daytime, which was applied to a dynamic process of the sea fog in the middle and northern Yellow Sea on 8 April 2014. The applying result showed that the proposed algorithm of sea fog detection in this paper could better monitor the dynamic change of the sea fog in the middle and northern Yellow Sea on 8 April 2014. In addition, the accuracy of the algorithm was tested based on eleven times fog product from FY-3B. The test results showed that the probability of detection (POD) was 90.9%, false alarm rate (FAR) was 33.2%, and critical success index (CSI) was 62.6%, which indicated that the proposed method in the paper was effective and feasible.
FY-2E; sea fog; dynamic threshold; cloud and fog separation
10.11755/j.issn.1006-7639(2016)-04-0738
2015-10-19;改回日期:2015-12-04
广东省气象局科学技术研究项目(2014B08)和公益性行业(气象)科研专项(GYHY201306042)共同资助
田永杰(1989- ),男,河南新乡人,硕士研究生,主要从事卫星气象遥感研究. E-mail:t_yongjie@163.com
王捷纯(1980- ),女,广东澄海人,硕士,工程师,主要从事卫星气象研究. E-mail:wang_jc1@163.com
1006-7639(2016)-04-0738-05DOI:10.11755/j.issn.1006-7639(2016)-04-0738
P426.4
A
田永杰,邓玉娇,陈武喝,等.基于FY-2E数据白天海雾检测算法的改进[J].干旱气象,2016,34(4):738-742, [TIAN Yongjie, DENG Yujiao, CHEN Wuhe, et al. Algorithm Improvement of Sea Fog Detection in the Daytime Based on FY-2E Data[J]. Journal of Arid Meteorology, 2016, 34(4):738-742],
猜你喜欢
海洋预报(2023年6期)2024-01-05 09:24:16
科技资讯(2023年21期)2023-11-22 08:35:46
气象水文海洋仪器(2022年3期)2022-11-09 12:37:00
海峡科学(2022年8期)2022-10-14 02:55:42
东坡赤壁诗词(2021年1期)2021-03-24 18:25:35
成都信息工程大学学报(2018年3期)2018-08-29 01:08:52
水利规划与设计(2017年11期)2017-12-23 06:34:08
海洋气象学报(2017年4期)2017-12-04 08:41:46
疯狂英语·新读写(2017年9期)2017-09-25 01:23:29
水利科技与经济(2017年4期)2017-04-22 02:38:06
