一种大量程光纤布拉格光栅位移传感器
2016-09-20 07:11茜李丽君姚佳张艳丁小哲高春亭郭晓丽曹茂永
光通信研究 2016年4期
马 茜李丽君姚 佳张 艳丁小哲高春亭郭晓丽曹茂永
(山东科技大学a.电气与自动化工程学院; b.电子通信与物理学院;c.矿山安全检测技术与自动化装备国家地方联合工程研究中心,山东青岛 266590)
一种大量程光纤布拉格光栅位移传感器
马 茜a,c,李丽君b,c,姚 佳b,c,张 艳b,c,丁小哲b,c,高春亭b,c,郭晓丽b,c,曹茂永a,c
(山东科技大学a.电气与自动化工程学院; b.电子通信与物理学院;c.矿山安全检测技术与自动化装备国家地方联合工程研究中心,山东青岛 266590)
光纤光栅位移传感器具有精度高、本质安全、体积小和易复用等特点,但受到敏感材料的局限,大量程光纤光栅位移传感器很难获得。针对该问题,提出并实现了一种大量程的光纤光栅位移传感器,其采用行星轮系与粘贴光纤光栅悬臂梁相结合的结构,通过变换减速比来获得各种大量程;利用有限元分析法对传感器悬臂梁材料和结构进行了优化设计,研究了不同量程时该类传感器的输出特性。结果显示,该传感器输出信号的波长漂移量与位移量有着很好的线性关系,最大量程可达2 000 mm。
位移传感器;光纤布拉格光栅;有限元分析;大量程
0 引 言
大量程、高精度的位移传感器可应用在很多领域。目前,用于位移测量的大量程传感器主要包括机械式、电子式和光纤式[1]。机械式传感器体积大、精度低、且量程较小[2]。电子类位移传感器由于其抗电磁干扰、组网能力及信号传输能力的限制,也在逐渐被光纤式位移传感器所替代[3-5]。光纤类位移传感器主要以光纤光栅类最为普遍,但由于材料和结构的限制,目前常用的光纤光栅类传感器往往以小量程(一般小于100 mm)为主。为了扩大量程,主要方法有两种:(1)通过直连杆连接弹性形变装置扩大量程。但该类光纤传感器光栅形变小,灵敏度较低,体积大安装困难。(2)将弹簧直接与光纤光栅相连,通过拉扯弹簧传递和扩大传感器量程。但该方法容易造成光纤断裂,很难在环境恶劣的工程中使用[6-7]。
本文采用改良的行星轮系作为扩大量程的结构,并结合光纤布拉格光栅粘贴于悬臂梁上,获得了一种大量程、高精度和小体积的光纤光栅位移传感器。
1 传感器内部结构的有限元分析
传感器的内部结构主要由扩大和变换量程的行星轮系和粘贴光纤布拉格光栅的悬臂梁组成。行星轮系与悬臂梁之间通过钢丝连接。当检测探头检测到有位移变化时,利用行星轮系将位移变化一定比例后,拉动悬臂梁自由端产生相应位移,从而使粘贴的光纤光栅产生形变,进而发生波长漂移。行星轮系包括太阳轮1、行星齿轮2、变量程行星齿轮3和齿圈4,行星轮系的转动结构如图1所示。工作时,将固定端固定,检测探头对准位移检测点进行检测。太阳轮绕固定轴线O1顺时针自转,速度为ω1。行星轮固定在行星支架上,既自转又绕太阳轮公转,公转方向与太阳轮相同,自转方向相反,自转速度为ω2,其上同轴附加一半径不同的行星齿轮3。齿圈固定不动,当位移变化时拉动太阳轮转动,并带动行星齿轮2、3转动,将位移缩小一定倍数后输出,联动的钢丝拉动悬臂梁端产生微位移,作用于光纤光栅上[8]。

图1 行星轮系转动结构
设太阳轮的线速度为V1,角速度为ω1,半径为R1;行星齿轮2的线速度为V2,角速度为ω2,半径为R2;行星齿轮3的线速度为V3,角速度为ω3,半径为R3。则太阳轮1与行星齿轮3的线速度之比为

由于齿轮2带动齿轮3转动,因此ω2=ω3,V1=V2,则

减速比为R∶1,最终减速机的待测位移端与其悬臂梁自由端的转动位移之比为R2R∶R3。
光纤布拉格光栅的波长漂移为[9]

式中,Pe为有效弹光系数;L为悬臂梁长度;x为光纤光栅粘贴位置与悬臂梁固定端的距离;E为悬臂梁的场式模量;Iy为与x无关的常量;z为悬臂梁端面距中性面的距离,且z=h/2,h为悬臂梁厚度。则悬臂梁自由端的扰度为[9]:

式中,f为悬臂梁自由端位移。将式(4)代入式(3)可得布拉格光栅最终波长漂移量为

在不考虑连接处位移损失的情况下,将波长漂移量与待测位移及悬臂梁自由端位移建立关系,最终的系统位移分辨率为


图2 不同材料沿X轴的应力云图
传感器中的光纤光栅粘贴在离悬臂梁固定端一定距离处,当均匀且垂直于悬臂梁的力作用在悬臂梁自由端时,光纤光栅将受到相应的拉力。当温度不变、且光纤光栅只受到纵向的拉力,其他方向的应力为0时,光纤光栅的波长将随着自由端位移的增加而发生漂移。悬臂梁的材料即场式模量、横截面积、厚度及光纤光栅的粘贴位置等也会对传感器的波长漂移量(灵敏度,量程等)产生影响。本文对60Si2Mn、65Mn和50Cr VA型号弹簧钢材料的材料特性与传感器输出特性关系进行了有限元仿真分析。仿真采用ANSYS软件,悬臂梁长度为100 mm,横截面厚度为0.5 mm,宽度为20 mm。图2所示为不同材料沿X轴的应力云图。由图2可以看出,在梁的几何参数一致时,65Mn所受沿X轴的应变最大,即粘贴在上面的光纤光栅也会产生较大的微应变,因此在传感器制作时选择65Mn弹簧钢作为制作悬臂梁的材料。
同时,悬臂梁平面离自由端一定距离时,所受的应力分布相对较均匀,且越靠近固定端所受应力越大。因此,可将光纤光栅粘贴在尽量靠近固定端受力均匀的位置。
悬臂梁的厚度和宽度也会对悬臂梁所受应力产生影响。图3为悬臂梁宽度为30 mm时的仿真结果;图4为悬臂梁厚度为0.4 mm时的仿真结果。从图中可以看出,当悬臂梁的横截面宽度增大和厚度减小时,都会使沿X轴所受的应力减小,随之降低粘贴光纤光栅的灵敏度。
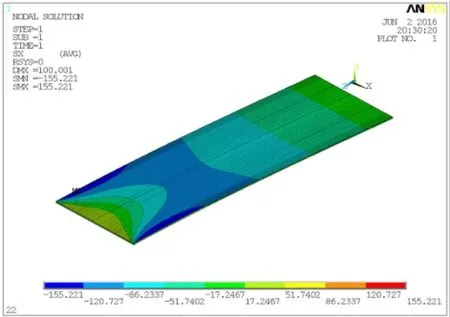
图3 悬臂梁宽度为30 mm时沿X轴的应力云图

图4 悬臂梁厚度为0.4 mm时沿X轴的应力云图
2 传感器性能测试与分析
传感器的内部结构主要包括量程变换装置和光栅粘贴悬臂梁结构,二者通过细钢丝连接,外轴钢丝拉线连接于实际被测结构。通过外置拉线,将位移量传递给位移扩大装置,带动内部连接悬臂梁钢丝轴转动,使得悬臂梁弯曲,并将应变传递给光纤光栅,通过光栅位移解调装置获得位移量输出,并可根据所需测量的位移量来切换传感器量程。
图5所示为传感器测试实验装置图。采用自制1 550 nm波段宽带光源,解调设备为光谱分析仪,环行器将反射光信号导入解调设备中,传感器外置钢丝与被测位移装置连接。

图5 传感器测试实验装置
悬臂梁长度L=100 m m,厚度h=0.5 mm。自由状态下的布拉格光栅波长λ=1 545.88 nm,位移最小变化量为1 mm。图6为悬臂梁自由端位移与光纤光栅波长拟合曲线。从图中可见,悬臂梁位移波长的灵敏度为92 pm/mm,悬臂梁自由端最大位移量为30 mm。图7所示为减速比为4∶1时的传感器输出特性曲线。由图可知,此时传感器的量程可达200 mm,灵敏度为11.2 pm/mm。实验中继续改变减速比,可获得更大量程的传感器。

图6 悬臂梁自由端位移与光纤光栅波长拟合曲线
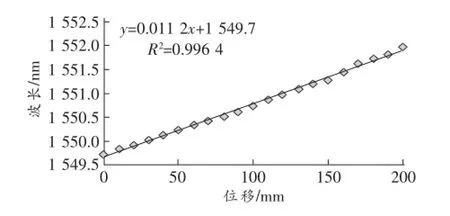
图7 传感器输出特性曲线
为了减小传感器的体积,我们采取固定减速比,并通过变换转轴半径的方法来达到变换传感器量程的目的。当减速机减速比固定为4∶1时,量程与传感器分辨率的关系如表1所示。可见,随着量程的变化,分辨率也随之改变[10]。

表1 传感器在不同量程时的分辨率
在钢丝缠绕过程中,由于缠绕时钢丝的叠加和倾斜会产生相应的交叠误差和倾斜误差,因此在测量时也会存在一定的随机误差,这部分误差可以在传感器的设计过程中通过在转动轴上刻制固线凹槽的方法来减小,也可以在解调系统中通过软件修正。
3 结束语
本文提出并实现了一种量程可调的光纤光栅位移传感器,最大测量位移为0~2 000 mm,分辨率为0.89~8.4 mm。该传感器具有体积小、结构紧凑、安装方便、量程大、量程可调、灵敏度高和易于组网等特点。可在煤矿顶板、液压支架等要求大量程、高精度、多点、多参量和实时监测等领域使用,还可用于替代各电子类位移传感器在其他领域的推广应用。
[1] 刘焱,王烨.位移传感器的技术发展现状与发展趋势[J].自动化技术与应用,2013,32(6):76-80.
[2] 王恒.光纤传感器位移特性的研究与应用[J].重庆工商大学学报:自然科学版,2015,32(1):55-58.
[3] 杨东兴,颜树华,杜列波,等.一种小型化纳米级单光栅位移测量系统的研制[J].红外与激光工程,2013,42(4):1020-1025.
[4] Guo Y,Wang Y,Jin M.Improvement of measurement range of optical fiber displacement sensor based on neutral network[J].Optik,2014,125(1):126-129.
[5] Moreno-Hernandez C J,Monzon-Hernandez D,Martinez-Rios A,et al.Long-Range Interferometric Displacement Sensing With Tapered Optical Fiber Tips [J].IEEE Photonics Technology Letters,2015,27 (4):379-382.
[6] 曹春耕.光纤光栅位移传感器:中国,20045434.4[P]. 2008-03-12.
[7] 曹清华.布拉格光栅位移传感器:中国,201020597175. 2[P].2011-05-25.
[8] 俞高红,俞腾飞,叶秉良,等.一种新型行星轮系机构的研究[J].机械工程学报,2013,49(15):55-61.
[9] 彭伟鸿,王英,梅林,等.基于悬臂梁的光纤光栅线性调谐器研究[J].光学与光电技术,2006,4(4):36-39.
[10]肖伟新,黄锡山,梁财春,等.一种新型灵敏度可调式光纤光栅传感器[J].广东工业大学学报,2012,29(3):68-72.
A Large Range FBG Displacement Sensor
MA Qiana,c,LI Li-junb,c,YAO Jiab,c,ZHANG Yanb,c,DING Xiao-zheb,c,GAO Chun-tingb,c,GUO Xiao-lib,c,CAO Mao-yonga,c
(Shandong University of Science and Technology a.College of Electrical Engineering and Automation;b.College of Electronic Communication and Physics; 3.Mine Safety Testing Technology and Local Joint Automation Equipment Engineering Research Center,Qingdao 266590,China)
Optical fiber Bragg Grating(FBG)displacement sensor has many advantages such as high sensitivity,intrinsic safety and easy multiplexing,etc.However,it is difficult to obtain a large range FBG displacement sensor due to the limitations of sensitive materials.In this paper,in order to solve this problem,a large range FBG displacement sensor is proposed and demonstrated.The planetary gear train and cantilever beam composite structure are utilized in this sensor.The FBG is pasted on the cantilever beam.Through changing the rotating ratio of the planetary gear train,different range of the sensors are achieved.Finite element analysis method is used to optimize the material and structure of the cantilever.The output characteristics of the sensor in different range are experimentally studied.The results show that the sensor has a very good linear relationship between output wavelengths and displacements and its maxima range can reach 2 000 mm.
displacement sensor;fiber Bragg grating;finite-element analysis;large range
TP212
A
1005-8788(2016)04-0049-03
10.13756/j.gtxyj.2016.04.015
2016-04-11
中国博士后特别资助项目(200902574);中国博士后面上资助项目(20080441150);山东省自然科学基金资助项目(ZR2013FM019,ZR2009AM017);山东省教育厅资助项目(J06P14);矿山灾害预防控制省部共建国家重点实验室培育基地开放基金资助项目(MDPC201602)
马茜(1988-),女,山东青岛人。博士研究生,主要从事光纤检测方面的研究。
猜你喜欢
军民两用技术与产品(2021年7期)2021-10-13
煤气与热力(2021年4期)2021-06-09
文苑(2020年12期)2020-04-13
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
制造技术与机床(2017年7期)2018-01-19
华人时刊(2017年13期)2017-11-09
通信电源技术(2016年1期)2016-04-16
陶瓷学报(2015年4期)2015-12-17
汽车电器(2014年8期)2014-02-28
传动技术(2014年1期)2014-02-27