
基于激光跟踪仪的轨道静态平顺性检测系统
2016-09-20 07:47:14姚连璧孙海丽周跃寅
同济大学学报(自然科学版) 2016年8期
姚连璧, 孙海丽, 王 璇, 周跃寅
(1. 同济大学 测绘与地理信息学院, 上海 200092; 2. 同济大学 现代工程测量国家测绘地理信息局重点实验室, 上海 200092;3. 首都师范大学 资源环境与旅游学院,北京 100048)
基于激光跟踪仪的轨道静态平顺性检测系统
姚连璧1,2, 孙海丽3, 王璇1, 周跃寅1
(1. 同济大学 测绘与地理信息学院, 上海 200092; 2. 同济大学 现代工程测量国家测绘地理信息局重点实验室, 上海 200092;3. 首都师范大学 资源环境与旅游学院,北京 100048)
研究了基于激光跟踪仪的轨道静态平顺性检测方法,集成激光跟踪仪、轨检小车(位移传感器和倾角传感器)、靶球及靶球支座等硬件设备,开发了轨道静态平顺性检测系统软件,建立了基于激光跟踪仪的轨道静态平顺性检测系统(TDS).在上海地铁13号线某区间,利用TDS进行了轨道静态平顺性检测试验,并采用SGJ-T-CEC-Ⅰ型客运专线轨道几何状态测量仪进行了对比测量. TDS测量系统轨道检测数据结果与SGJ-T-CEC-Ⅰ型客运专线轨道几何状态测量仪测量结果基本一致,验证了TDS测量系统可行性.
激光跟踪仪; 轨检小车; 轨道静态平顺性; 动态检测
高速铁路和城市轨道交通大规模的网络化发展和列车速度的大幅提高对轨道平顺性提出了更高的要求.轨道平顺性是指高速铁路或者城市交通轨道在承受荷载、复杂的地理、自然环境作用下能够保持列车运行状态良好、保证旅客舒适和安全的几何状态.轨道几何形位的平顺状态直接影响轮轨系统的运行安全、平稳舒适性、部件寿命、环境噪声等[1-4].目前高速铁路和城市交通轨道施工和维护过程中的轨道静态平顺性测量普遍采用三维测量法.三维测量法借助于全站仪实现光学跟踪测量进行轨道绝对定位,辅助轨检小车进行轨道相对测量.国内外有很多基于三维测量法的成熟系统,包括Leica GRP(global railway position)轨道精调系统[5-6]、GEDO(gleise einrichten dokumentation online)精调系统,以及中铁工程设计咨询公司、广州南方高速铁路测量技术公司研制的轨道检测系统等.国内外很多学者也进行了轨道静态平顺性检测新方法的探索.基于双向近景摄影测量检测轨道几何状态的方法也用于获取轨道几何参数,并通过现场试验取得了较好的效果[7-8].刘春等[9]、孟晓林等[10]通过对轨道点云数据处理,建立轨道模型和轨道特征点,从而进行轨道几何参数计算及轨道静态平顺性分析,提出了一种很有研究价值的方法.姚连璧等[11]利用激光跟踪仪进行了轨道静态平顺性检测方法的初步探索.目前轨道静态平顺性检测方法采用“走-停式”仅对轨枕处进行测量,速度较慢;轨道中线点精度受全站仪测量精度影响较大,在工程施工过程中通过大量重复观测来提高精度,不能更好地适应高速铁路和城市轨道交通运营阶段对轨道静态平顺性快速和高精度检测的要求.
本文在姚连璧等[11]利用激光跟踪仪进行轨道静态平顺性检测方法的基础上,研究基于激光跟踪仪的轨道静态平顺性检测方法.首次集成激光跟踪仪进行轨道静态平顺性检测,解决其用于轨道检测时的软硬件问题,同时实现轨道静态平顺性静态测量和动态检测,建立一套适用于轨道精调测量和轨道静态平顺性动态测量的检测系统,为轨道施工和运营维护阶段的平顺性检测提供了一种新的检测方案.
1 系统硬件集成与测量方案
本文研究了基于激光跟踪仪的轨道静态平顺性检测系统,实现轨道静态精调和轨道动态检测一体化测量,采用激光跟踪仪作为绝对测量设备,用于获取轨道绝对几何参数.轨道静态精调测量中采用位移传感器和倾角传感器分别用于获取轨道轨距和超高数据.轨道静态平顺性动态检测中,仍然采用位移传感器获取轨距,超高采用激光跟踪仪往返测量轨检小车上靶球绝对坐标方式获取.
本文研究的轨道静态平顺性检测系统集成了激光跟踪仪(包括控制箱、气象站、靶球及靶球支座[12]等)和轨检小车(单片机、位移传感器和倾角传感器)、计算机、无线通讯模块(也可称为无线模块).其中,激光跟踪仪作为主体测量工具,用于获取轨道两边的CPⅢ控制点(基桩控制网CPⅢ,base-piles control points III)和轨道点的三维坐标,并采用API公司的T3激光跟踪仪用于系统集成,其精度指标如表1所示,动态跟踪测量频率可达几百甚至上千赫兹,在短距离测量精度和频率上远远优于全站仪.轨检小车用于安置激光跟踪仪的靶球、位移传感器、倾角传感器以及单片机,并获取轨道倾角、轨距数据.单片机用于集成处理位移传感器和倾角传感器数据.计算机作为激光跟踪仪、轨检小车的控制和系统的数据处理终端,计算机端应用软件系统实现对激光跟踪仪的控制和数据采集、处理及输出.无线通讯模块用于实现计算机与轨检小车(倾角传感器和位移传感器)的无线通讯.系统硬件集成如图1所示.系统集成后,参考《客运专线轨道几何状态测量仪暂行技术条件》[21]和《高速铁路工程测量规范》[22]进行了精度测试.激光跟踪仪定位精度,位移传感器测量轨距精度,倾角传感器测量超高精度,且均能够符合轨道测量要求.由于篇幅关系本文不做详细介绍.
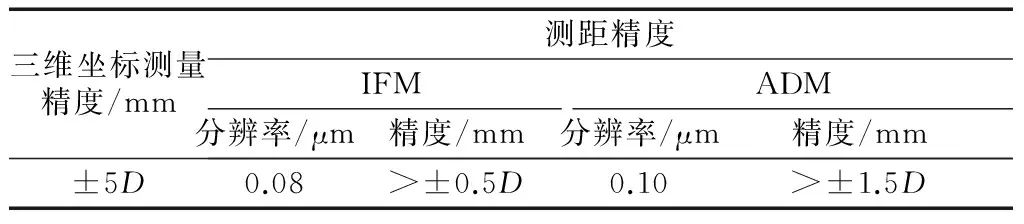
表1 T3激光跟踪仪精度指标
注:D为距离,单位为km.IFM—interferometer measure; ADM—absolute distance measure.

图1 系统集成方案图
轨道静态平顺性检测主要分施工期间的轨道精调静态测量和运营期间的轨道静态平顺性动态检测.轨道精调静态测量模式中,参考现有高速铁路和地铁中的测量方法,采用定点测量轨枕处的轨道点坐标、倾角和轨距,实时测量并输出轨道调整量到轨检小车单片机上,直接指导轨道精调,该测量模式也是轨道检测方法中三维测量法的测量模式.本文在该测量模式中,使用激光跟踪仪作为绝对测量设备替换现有测量系统中的全站仪,用以提高绝对测量精度、跟踪速度等.轨道静态平顺性动态检测模式中,轨检小车在轨道上往返运行,激光跟踪仪动态跟踪轨检小车上的靶球并获取靶球三维坐标,根据往返运行获取的靶球三维坐标和位移传感器获取的轨距进行左右轨道点坐标换算,从而获取轨道中线和轨道横向倾角.
2 系统软件设计
激光跟踪仪配套的测量与数据处理软件无法实现对轨道数据的专业化测量和处理.本文在基于激光跟踪仪的轨道静态平顺性检测方法研究的基础上进行数据采集与分析软件的开发,并将集成的基于激光跟踪仪的轨道静态平顺性检测系统命名为Track Detect System(TDS).TDS集成激光跟踪仪和轨检小车(位移传感器和倾角传感器)进行轨道静态平顺性测量,系统工作主界面如图2所示.
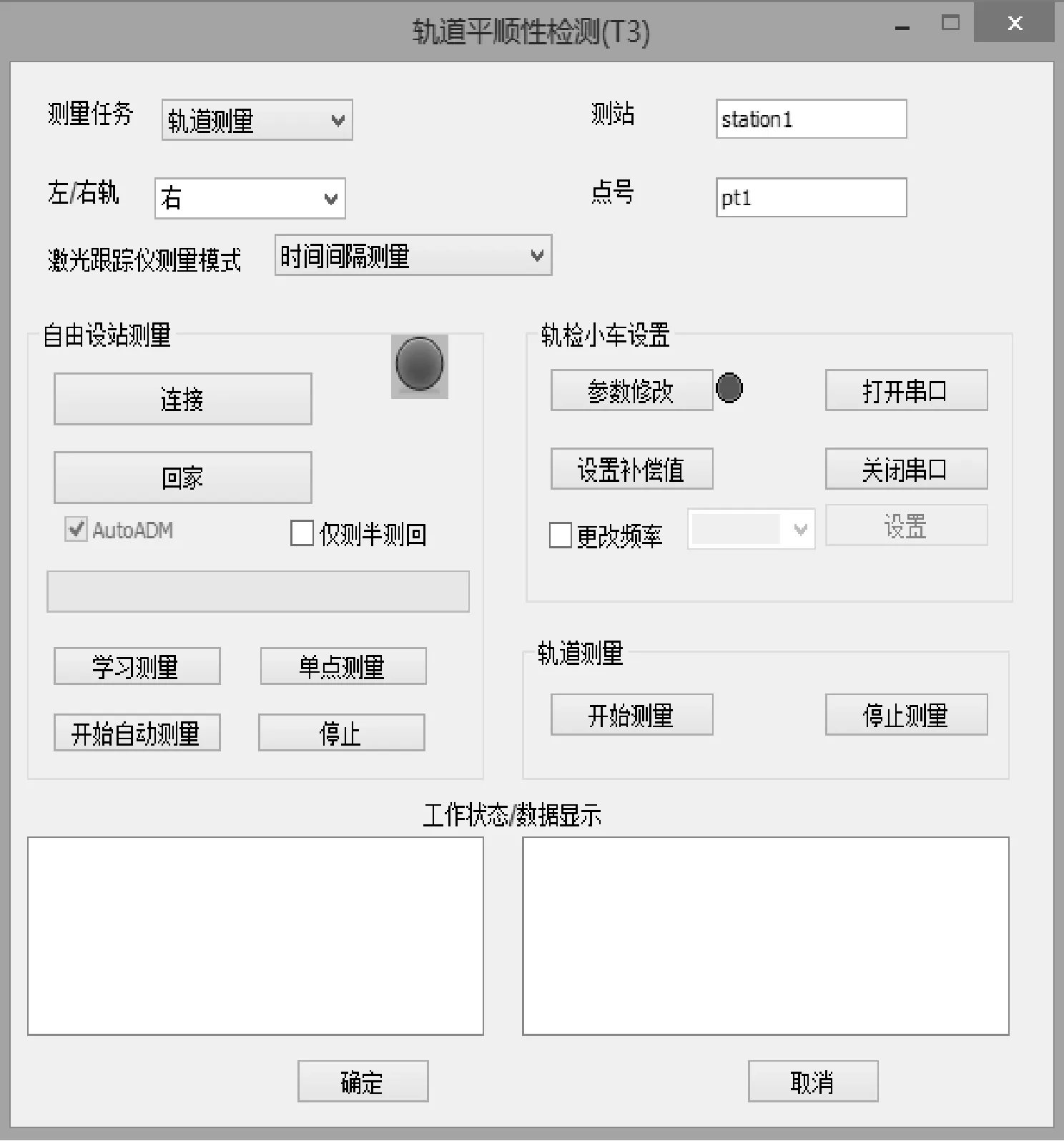
图2 轨道静态平顺性检测界面
考虑本文选择的激光跟踪仪SDK(software development kit)仅支持Visual Studio 2008 C++,所以本文数据采集软件在Visual Studio 2008 C++平台下进行设计和开发.
轨检小车采用单片机用于将位移传感器和倾角传感器的统一控制和数据输出.计算机通过单片机指令实现对位移传感器与倾角传感器的通讯与控制.单片机指令功能主要包括:设置轨距和倾角补偿值,设置测量参数,输出调整量,输出中线偏差,读取设置参数,读取补偿值,读取测量数据.
根据轨道施工和运营测量需求,数据采集和分析系统需分别针对轨道静态精调测量和轨道动态检测两种模式进行工作,轨道静态精调测量需实时给出当前测量的轨道几何参数偏差即轨道调整量,所以轨道静态精调测量和数据计算需要在数据采集软件中共同完成.轨道动态检测的数据量较大,数据处理的工作量大,需要更多的人机交互处理,为此,针对轨道动态检测数据处理,设计和开发了基于MATLAB的轨道静态平顺性动态检测数据后处理软件(track post process,TPP),软件界面如图3所示.TPP具有五个功能模块:设置,测量数据文件,数据处理,绘图及输出.TPP主要用于处理轨道动态检测数据,能够进行设计数据和测量数据的导入,并进行轨道几何参数计算和轨道静态平顺性分析,同时也能用于轨道静态精调数据处理.

图3 TPP 主界面
3 实验与分析
为了对基于激光跟踪仪的轨道静态平顺性检测系统进行验证,在上海地铁13号线自然博物馆站某在建区间进行了轨道测量试验.本次试验采用TDS轨道测量试验,并利用中铁工程设计咨询集团有限公司的SGJ-T-CEC-Ⅰ型客运专线轨道几何状态测量仪在同一区段测量,从而进行对比分析,并利用TDS进行轨道动态测量检测.
3.1轨道精调测量数据结果
根据TDS与SGJ-T-CEC-Ⅰ型客运专线轨道几何状态测量仪测量结果进行轨道几何参数计算,并根据该区段轨道设计数据进行几何参数偏差计算.为了表达方便,以下图片中将SGJ-T-CEC-Ⅰ型客运专线轨道几何状态测量仪测量的数据简称为“中铁咨询测量”,TDS测量的标为“TDS测量”.
地铁轨道标准轨距为1 435 mm,试验中通过对比实测轨距与标准轨距的偏差即轨距偏差来对比分析TDS与SGJ-T-CEC-Ⅰ型客运专线轨道几何状态测量仪的测量质量.TDS静态测量的轨距偏差与SGJ-T-CEC-Ⅰ型客运专线轨道几何状态测量仪测量的轨距偏差对比如图4所示.
由图4可知,TDS静态测量的轨距偏差与SGJ-T-CEC-Ⅰ型客运专线轨道几何状态测量仪测量的轨距偏差数据变化趋势相似,同一轨枕处轨距测量值的偏差基本在0.3 mm以内,最大不超过0.5 mm.根据静态对比数据,分别计算两套数据测量的轨距变化率,即用轨距差除以里程差,计算轨枕处轨距变化率,以1/1 500为合格标准.TDS系统测量轨距合格率为82.0%,SGJ-T-CEC-Ⅰ轨检仪测量轨距合格率为81.0%,轨距变化合格率基本吻合,但两套系统测量的轨距变化率合格率较低.这是由于试验区段仍处于施工阶段,运营前还需要一定的精调.
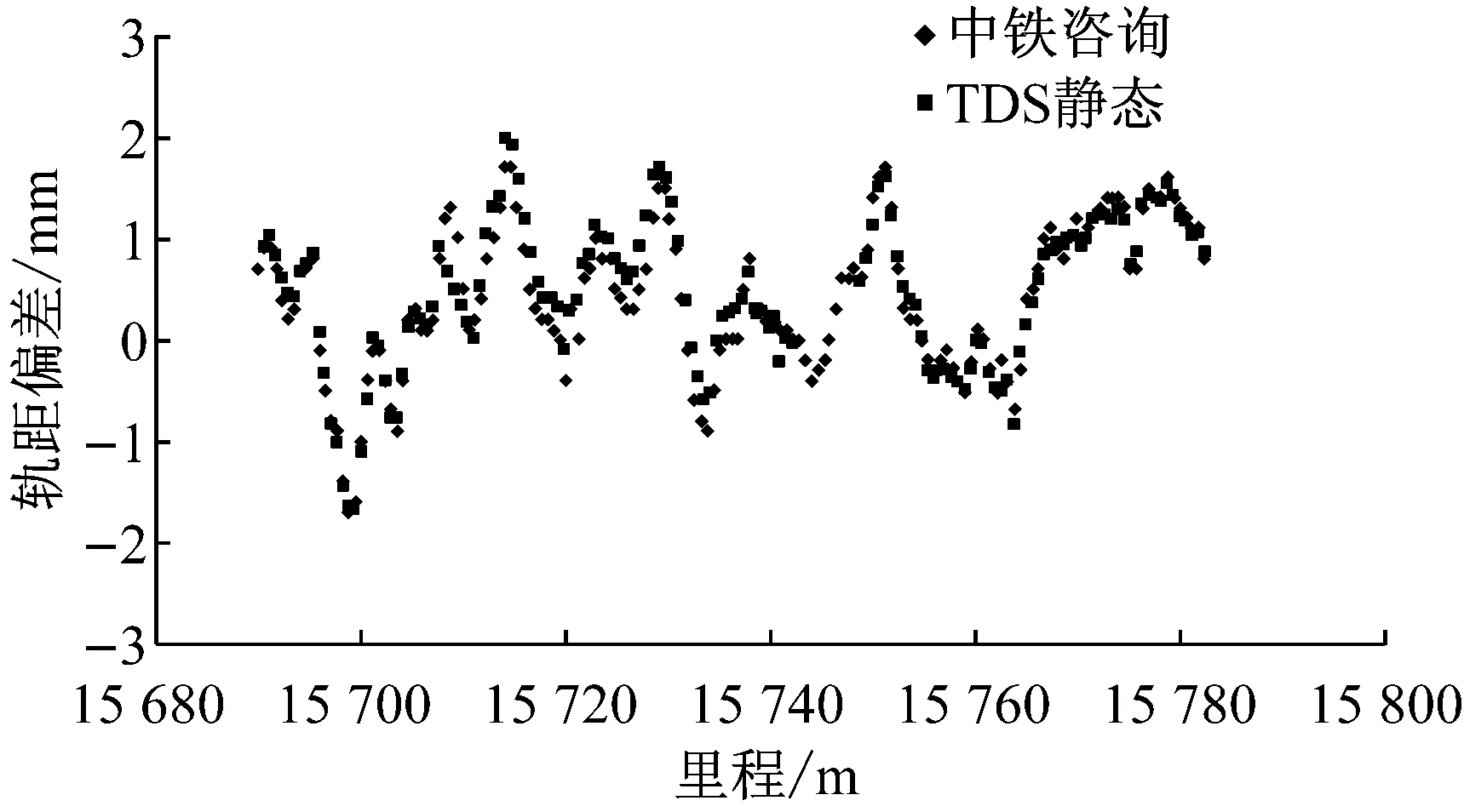
图4 TDS静态测量与中铁咨询测量轨距偏差对比
TDS静态测量与SGJ-T-CEC-Ⅰ型客运专线轨道几何状态测量仪测量的轨道中线横向偏差和高程偏差对比如图5和图6所示.由于TDS静态测量时在测站两侧进行轨道测量,测站当前位置在本站测量时会有一部分缺失,下一测站测量时进行补测,所以第二测站(里程约为15 745 m)中出现了几个轨枕的缺失.
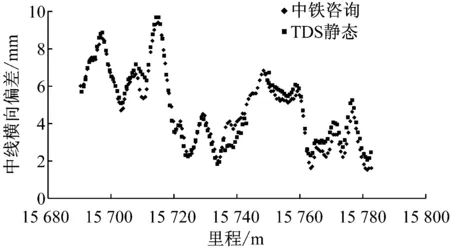
图5 TDS静态测量与中铁咨询测量中线横向偏差对比
由图5和图6可知,TDS和SGJ-T-CEC-Ⅰ型客运专线轨道几何状态测量仪测量的轨道中线横向偏差和高程偏差变化趋势较为符合.第一站中线横向偏差在测站附近与中铁咨询测量结果有较大偏差,最大偏差将近1 mm;第二站也在测站附近出现约1 mm的偏差.这可能是在TDS测量时受测站周围轨检小车重新安置的影响.此外,TDS和SGJ-T-CEC-Ⅰ型客运专线轨道几何状态测量仪两套系统测量的轨道中线符合较好.

图6 TDS静态测量与中铁咨询测量中线高程偏差对比
图7给出TDS和SGJ-T-CEC-Ⅰ型客运专线轨道几何状态测量仪测量的超高对比图.超高是采用轨距测量和倾角测量值进行计算得到,测量精度较高,两套系统测量超高符合较好,同一轨枕处测量超高偏差基本在0.2 mm以内.超高测量精度较高,TDS和SGJ-T-CEC-Ⅰ型客运专线轨道几何状态测量仪两套系统测量超高符合较好,也决定了该区段扭曲数据符合得很好,如图8所示.
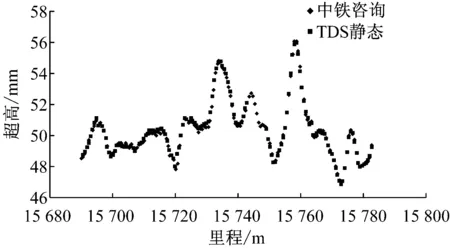
图7 TDS静态测量与中铁咨询测量超高对比
3.2轨道动态平顺性检测数据结果
轨距测量和分析方法与轨道静态测量类似.由图9可知,TDS动态测量的轨距偏差与SGJ-T-CEC-Ⅰ型客运专线轨道几何状态测量仪测量的轨距偏差的数据变化趋势相似,同一轨枕处轨距测量值的偏差均在0.5 mm以内.
TDS动态测量与SGJ-T-CEC-Ⅰ型客运专线轨道几何状态测量仪测量的轨道中线横向偏差和高程偏差对比如图10和图11所示.由图10和图11可知,TDS动态测量和SGJ-T-CEC-Ⅰ型客运专线轨道几何状态测量仪测量的轨道中线横向偏差和高程偏差变化趋势较为符合,TDS动态测量轨道中线横向偏差和高程偏差与SGJ-T-CEC-Ⅰ型客运专线轨道几何状态测量仪测量结果偏差最大不超过1 mm.根据动态对比数据,分别计算两套数据测量的轨距变化率,即用轨距差除以里程差,计算轨枕处轨距变化率,以1/1 500为合格标准.TDS系统测量轨距合格率为73.2%,SGJ-T-CEC-Ⅰ轨检仪测量轨距合格率为72.3%,轨距变化合格率基本吻合,与静态测量结果相似,两套系统测量的轨距变化率合格率较低.
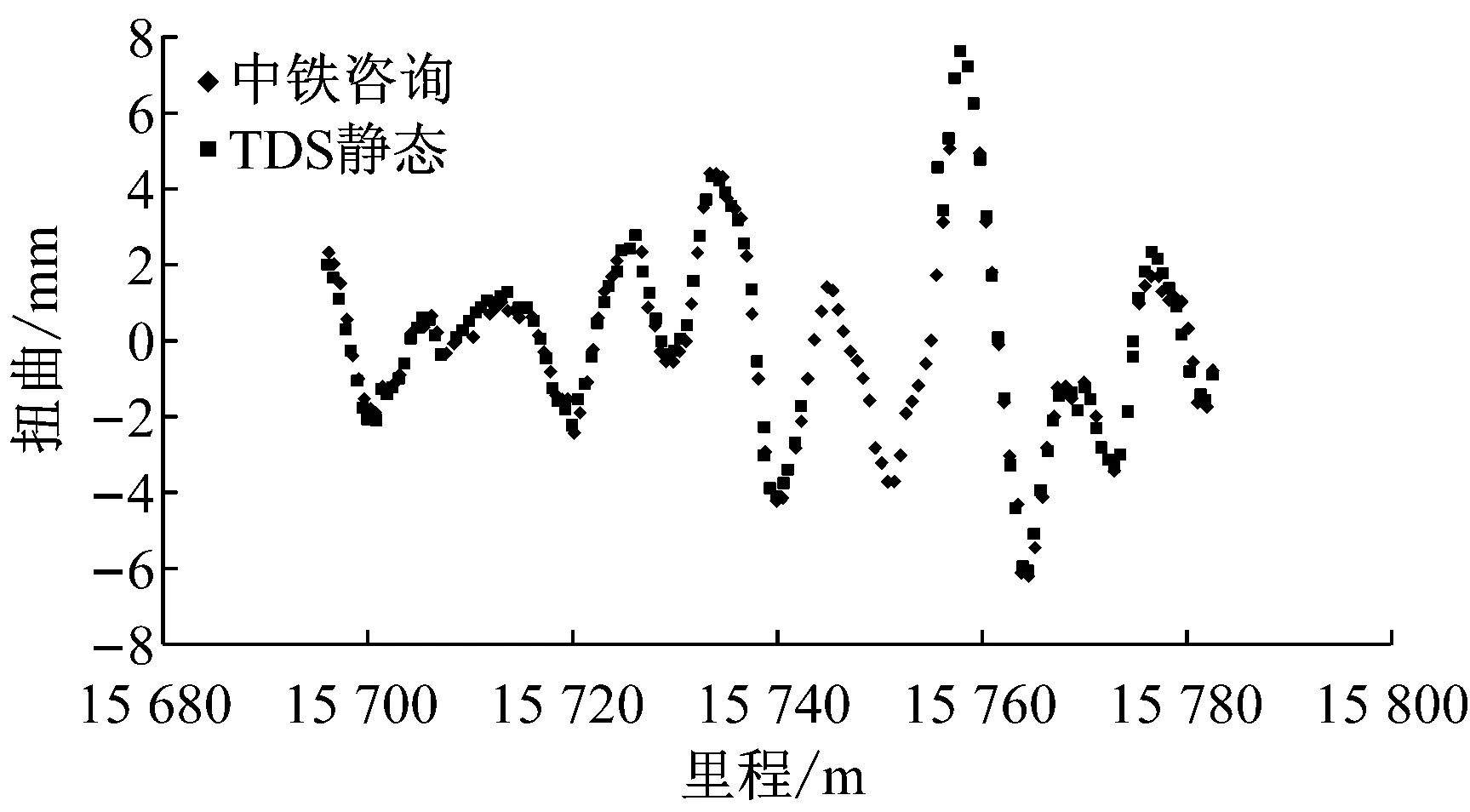
图8 TDS静态测量与中铁咨询测量扭曲对比
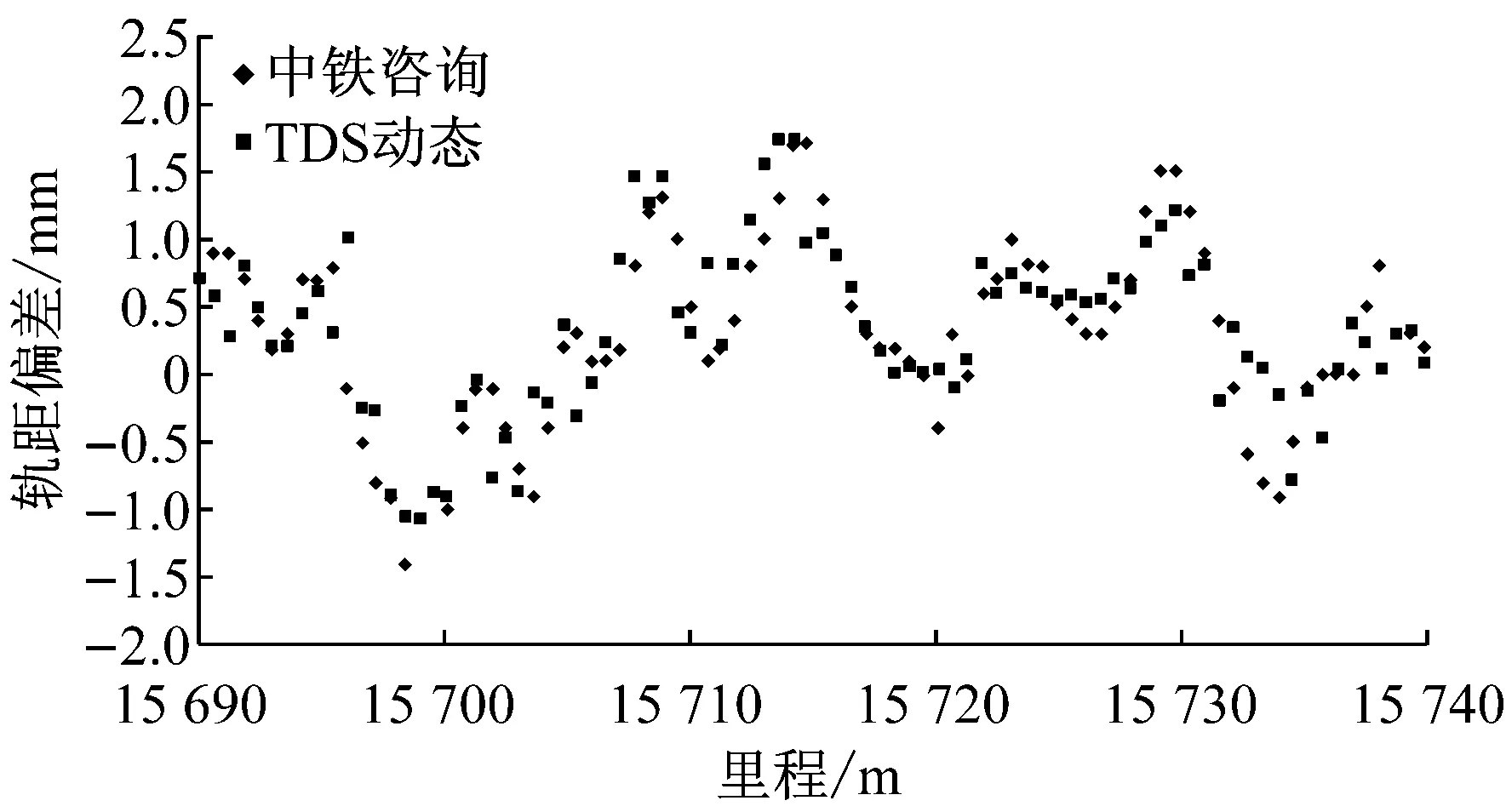
图9 TDS动态测量与中铁咨询测量轨距偏差对比
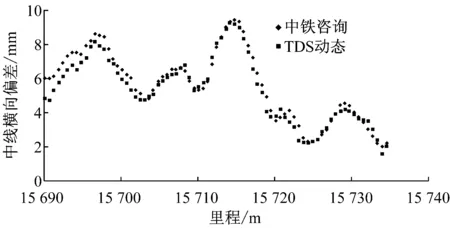
图10 TDS动态测量与中铁咨询测量中线横向偏差对比
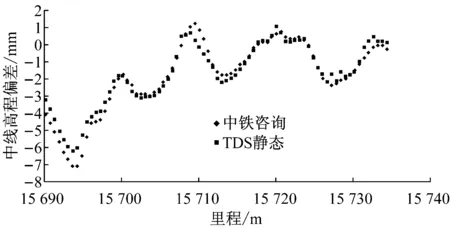
图11 TDS动态测量与中铁咨询测量中线高程偏差对比
这是由于实验区段仍处于施工阶段,运营前还需要一定的精调.
图12和图13给出TDS和SGJ-T-CEC-Ⅰ型客运专线轨道几何状态测量仪测量的超高和扭曲对比图.TDS动态测量中轨道横倾角是通过动态左右轨获取的轨道三维坐标计算.SGJ-T-CEC-Ⅰ型客运专线轨道几何状态测量仪测量的超高是采用轨距测量和计算的横倾角测量值进行计算得到.两套系统测量超高符合较好,同一轨枕处测量超高偏差基本在0.3 mm以内,超高偏差最大不超过0.5 mm.TDS和SGJ-T-CEC-Ⅰ型客运专线轨道几何状态测量仪两套系统测量的扭曲数据也符合较好.

图13 TDS动态测量与中铁咨询测量扭曲对比
通过施工现场的轨道测量试验,进行了轨道静态平顺性检测系统TDS的静态和动态测量数据与SGJ-T-CEC-Ⅰ型客运专线轨道几何状态测量仪测量轨道几何参数的对比测量.通过数据分析可知,本文研究的轨道静态平顺性检测系统的轨道精调测量数据和轨道静态平顺性检测数据结果均与SGJ-T-CEC-Ⅰ型客运专线轨道几何状态测量仪测量结果符合较好,验证了本文研究的方法与系统的可行性.相对于现有轨道测量方法,本文研究的轨道静态平顺性检测系统在进行轨道静态平顺性检测时,采用动态测量方式,大大提高了测量效率.对于TDS具体测量实施过程中,应该尽量保证同一测站的连续性,以减少换站带来的误差.
4 结语
本文研究了基于激光跟踪仪的轨道静态平顺性检测方法,集成了激光跟踪仪、轨检小车(位移传感器和倾角传感器)、靶球及靶球支座、计算机、无线模块等硬件设备,并在Visual Studio 2008 C++和MATLAB平台下进行了轨道静态平顺性检测软件和数据后处理软件开发,建立了基于激光跟踪仪的轨道静态平顺性检测系统.在上海地铁13号线自然博物馆站某在建区间,利用TDS和中铁工程设计咨询集团有限公司的SGJ-T-CEC-Ⅰ型客运专线轨道几何状态测量仪进行了轨道测量对比试验,并通过数据分析可知,TDS与SGJ-T-CEC-Ⅰ型客运专线轨道几何状态测量仪测量数据结果基本一致.本文研究的轨道静态平顺性检测方法能够对轨道静态平顺性数据进行高精度的获取和合理的评价.
[1]徐奇瑞,许建明,黎国清.轨道检查车技术的发展与应用[J].中国铁路,2005 (9):37.
XU Qirui, XU Jianming, LI Guoqing. Development and application of the technology of track inspection Car[J]. Chinese Railways, 2005 (9):37.
[2]罗林,张格明,吴旺青,等.轮轨系统轨道平顺状态的控制[M].北京:中国铁道出版社, 2006.
LUO Lin, ZHANG Geming, WU Wangqing,etal. Control of track regularity of wheel rail system[M]. Beijing: China Railway Publishing House, 2006.
[3]Steenbergen M J. Quantification of dynamic wheel-rail contact forces at short rail irregularities and application to measured rail welds [J]. Journal of Sound and Vibration, 2008, 312(4): 606.
[4]Suarez B, Felez J, Antonio L J,etal. Influence of the track quality and of the properties of the wheel-rail rolling contact on vehicle dynamics [J]. Vehicle System Dynamics, 2013, 51(2):301.
[5]胡庆丰.安博格GRP1000轨检小车进行无碴轨道检测的作业方法[J].铁道勘察,2008,34(3):17.
HU Qingfeng.Operational method for checking ballastless track with GRP1000 track checking car made by Amberg Technologh AG[J]. Railway Investigation and Surveying,2008,34(3):17.
[6]郝亚东,赵杰,樊廷春.基于GRP1000的无砟轨道精调测量研究[J].测绘通报,2013(4):52.
HAO Yadong, ZHAO Jie, FAN Tingchun. Study of non-ballasted track fine-tuning measurement based on GRP1000[J]. Bulletin of Surveying and Mapping,2013(4):52.
[7]陈强, 刘丽瑶, 杨莹辉. 基于双向近景摄影测量检测轨道平顺度的计算模型[J].铁道学报,2012,34(12):83.
CHEN Qiang, LIU Liyao, YANG Yinghui. Track regularity determination model by two-way close-range photogrammetry[J]. Journal of the China Railway Society, 2012, 34(12):83.
[8]刘丽瑶. 近景摄影测量检测高速铁路轨道几何状态的精度研究[D].成都:西南交通大学,2012.
LIU Liyao. Accuracy assessment of measuring track geometric state for high speed railway with close-range photogrammetry[D]. Chengdu: Southwest Jiaotong University ,2012.
[9]LIU Cun, LI Nan, WU Hangbin,etal. Detection of high-speed railway subsidence and geometry irregularity using terrestrial laser scanning [J]. Journal of Surveying Engineering,2014,140(3): 04014009.
[10]MENG Xiaolin, LIU Cun, LI Nan,etal. Precise determination of mini railway track with ground based laser scanning [J]. Survey Review, 2013,46(336):213.
[11]YAO Lianbi, SUN Haili, ZHOU Yueyin,etal. Detection of high-speed railway track static regularity with laser trackers [J]. Survey Review, 2015, 47(343):279.
[12]姚连璧,孙海丽,孙盼盼.SMR靶球与轨道控制点连接装置的设计与精度测试[J].大地测量与地球动力学,2014,34(2):41.
YAO Lianbi, SUN Haili, SUN Panpan. Design and accuracy test of connection device of SMR target sphere and track control point[J]. Journal of Geodesy and Geodynamics,2014, 34 (2):41.
[13]铁道部科学技术司.客运专线轨道几何状态测量仪暂行技术条件[M]. 北京:中国铁道出版社,2008.
Science and Technology Department of Ministry of Railways of China. Tentative technical specifications of the measuring instrument for the geometric state of the PDL track[M]. Beijing: Chinese Railway Publishing House ,2008.
[14]中华人民共和国铁道部.TB 10601—2009高速铁路工程测量规范(附录) [S].北京:中国铁道出版社,2009.
Ministry of Railways of the People's Republic of China. TB 10601—2009 Code for engineering survey of high-speed railway[S]. Beijing: Chinese Railway Publishing House, 2009.
Detecting System of Track Static Regularities Based on the Laser Tracker
YAO Lianbi1,2, SUN Haili3, WANG Xuan1, ZHOU Yueyin1
(1. College of Surveying and Geo-informatics, Tongji University, Shanghai 200092, China; 2. Key Laboratory of Advanced Engineering Surveying of NASMG, Shanghai 200092, China; 3. College of Resource Environment and Tourism, Capital Normal University, Beijing 100048, China)
With the rapid development of high-speed railway and urban rail transit, the significance of security is of unprecedented significance. Track regularity is of crucial importance to high-speed railway operation safety. This paper proposed a method to detect track static regularities based on a laser tracker. A track static regularity detecting system was built based on the laser tracker integrated displacement sensor, tilt sensor and communication sensors and their platform set-up. Software development was aimed at verifying the methods of track static regularity detecting and data processing. In order to verify the detecting and data processing method of track static regularity, experiments were conducted at a part of the Shanghai metro line 13 at Natural Museum Station. The SGJ-T-CEC-Ⅰpassenger dedicated line track geometric condition detection device was used for comparative analysis. The feasibility and high accuracy of the track static regularity detecting method and data processing method are verified by using the SGJ-T-CEC-Ⅰpassenger dedicated line track geometric condition detection device.
a laser tracker; a track trolley; track static regularity; dynamic measurement
2015-11-04
测绘地理信息公益性行业科研专项经费(HY14122136);上海市自然科学基金(15ZR1443700)
姚连璧(1964—),男,教授,博士生导师,工学博士,主要研究方向为多传感器集成及其应用. E-mail:lianbi@tongji.edu.cn
孙海丽(1986—),女,工学博士,主要研究方向为轨道检测方法.E-mail:hljwksunhaili@163.com
P258
A
猜你喜欢
疯狂英语·新读写(2023年4期)2023-05-10 10:44:20
建材发展导向(2021年13期)2021-07-28 07:14:56
装备制造技术(2020年2期)2020-12-14 03:09:28
今日农业(2019年12期)2019-08-15 00:56:32
科技视界(2019年9期)2019-06-12 06:13:58
电子制作(2019年9期)2019-05-30 09:42:02
中学生数理化·中考版(2018年11期)2019-01-31 06:18:04
机械工程与自动化(2018年5期)2018-11-01 03:43:16
电子制作(2017年7期)2017-06-05 09:36:14
电子设计工程(2015年17期)2015-02-27 12:08:13
