
旅游机器人的设计
2016-09-18 11:05西北民族大学洪淼淼
电子世界 2016年12期
西北民族大学 洪淼淼 蔡 宁
旅游机器人的设计
西北民族大学洪淼淼蔡宁
当前的中国经济发展迅速,中国内地和中国与世界各地的物流系统都需要大量的人力和物理。如果实现自动运输,货物的自动装载,可以极大的增加物流的速率和人力的释放。当前世界各国包括中国在内的很多国家都在研究自动化运输,让运输车自动把货物从一处装运到另一处,整个过程都不需要人为控制。该设计旅游机器人具有模拟自动行走找到对应运输地点的特点。
机器人;运输;自动化
1 机器人的设计任务及意义
设计的机器人是一个外形似一个人站在一辆小车上,并能够实现沿着白线到达预先给定的网咖平台,要求其尽量在规定的时间内到达尽可能多的旅游景点,拿到较多的分数,最后回到自己的“家”(旅游机器人所在的起始位置)。整个过程中不能出现较大的偏差,能够平稳的爬坡巡线过减速板顺利完成。
旅游机器人的设计实现了对自动化运输的探索,整个过程要求对于沿线方式的探索,如何在速度和稳定间找到最佳路线,提高了机器人自动化控制的高要求,这些都是实际的自动化运输过程中会遇到的问题,这整个模拟的过程中提高参与的学子对自动化控制的兴趣,有利于学科的提高,增强学生解决实际问题的能力。
2 机器人的实现功能及组成部分
2.1总体功能
本次设计的机器人主要实现以下一些功能:能够完成基本的寻白线的功能,按照绿地毯上的白线完成所有景点的游历;在模拟网咖平台上实现自动旋转对应角度的功能;有较强的稳定性,能够在有一定坡度的跷跷板和上平台的坡度上稳定上行和下行;能够判定景点,并且挥动模拟手臂示意;能够自动识别门,并检验回“家”的门是否打开。
2.2组成部分
该旅游机器人由主控制器、电池、舵机、灰度传感器、舵机传感器、电机驱动等组成,以下是对这些部分作一些简单的介绍:
(1)主控制器:使用高性能32位ARM12内核的主控制器,运算速度高达120MHZ。主控器拥有1M程序存储空间,128k内存。拥有6路DO数字输出和伺服电机输出,有6路电机驱动信号输出,还有22路模拟信号输入端。
(2)供电电池:使用的是21V的5芯的锂电池,重量轻,能量力比高,使用寿命长,并具有高功能承受力。
(3)舵机:使用数字金属舵机,精确度更高。
(4)灰度传感器:使用抗干扰8通道地面灰度传感器,输入电压最大5V,RS485波特率937500bps。
(5)电机驱动:使用2/3通道电机驱动,电机电源输入电压12 至25V,输出电流最大值:20A,PWM频率1000至7500HZ,PWM占空比0%至100%。信号输入电压3.3至5V。
3 结构与外观
所设计的旅游机器人在外观和结构上也各有特色。其结构是使用黄色的环氧树脂板制作整体车架,具有高强度、强韧性的特点,使用大功率的电机,并且使用的是单边的驱动,即同一边的电机是同一个驱动,一边的电机同时并转同时停。在前后轮子约一厘米处为八通道地面灰度检测,根据地面的反光值的不一样,判断车体位置。并且在灰度的下方有两条保护的弧形金属带,用于保护八通道灰度,在巡线、爬坡、过跷跷板时不会造成损害。主电池位于车体的正中心,保证车体的稳定性,转弯时能够实现以车体中心为支点的旋转。车体的前方是四个红外距离传感器,用于检测与景点的距离等。舵机电池位于车体的后方,与舵机位置对应,同样保证重心位于中心。车体小人使用的三个12g的金属舵机,模拟的手臂是使用铝合金,强度较高,配合着金属舵机,可以保证推动景点的触动板时不会折断,并且使触碰开关打开。固定车体小人之间使用铜柱,四根铜柱连接金属架子,金属架子上固定舵机小人。使用激光距离传感器为于舵机小人下方,时事在地面反应一个红色激光小点,用于检测白线进行转弯。在主电池上方是主控板,方便烧录软件和使用各类测试与反馈。
该机器人还有一个整体看上去像一辆黄色小车,前面站立一个小人的外观结构。如图1,是该设计的整体实物图。

图1 旅游机器人实物图
4 系统设计方案
4.1硬件系统
使用高性能32位ARM12内核的主控制器,控制大功率驱动,实现双驱动输出,车体前后有8通道的灰度传感器,实时反馈给主控器地面灰度情况用于矫正驱动输出。车体前方有四个距离传感器,检测到景点时向主控反馈1。主控输出PWM波,控制手部和头部的舵机运动,在没有检测到时为主控反馈0。激光距离传感器,用于检测白线,当旋转了180度时,因为白色和绿色的反光度的不一样激光距离传感器可以检测到上平台时的白线,反馈给主控,然后停止旋转,达到正确的位置。电池使用了两块电池,分别给主控驱动供电,还有舵机供电。
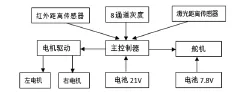
图2 硬件系统图
4.2软件系统
(1)编程语言
使用VJC-MF编译软件。JC语言是用于能力风暴智能机器人的专用开发语言。 VJC-MF的编程语言实现了标准C语言的一个子集,它包括控制语句(for,while,if else)、局部变量和全局变量、数组、指针、16位和32位整数以及32位浮点数。
(2)系统特点
在VJC-MF中,不仅可以用直观的流程图编程,也可以使用JC语言编写更高级的机器人程序。流程图和JC语言双剑合壁,既能领读者轻松入门,又能够让使用者在编程中发挥大的创造力。VJCMF操作简便,有活泼明快的图案和简短的文字说明。可以使用形象化的模块, 由顶向下搭建流程图,搭建流程图的同时,动态生成无语法错误的JC代码。流程图搭建完毕,程序就已经编写完成,可以立即下载到机器人中运行。已入门的读者可以直接在JC代 码编辑环境中编写程序。VJC-MF 能够使我们在丰富多彩的机器人世界里,边玩边学,愉快地掌握许多有用的科技知识。
5 结语
本文根据比赛的任务要求使旅游小车完成了所要求任务,并且具有很多优化设计。小车的前后使用了不一样硬度的橡胶轮子,保证了车体旋转时车体不会弹的厉害,同时又保证在过跷跷板时小车打滑减弱,并在下跷跷板时起到一定的减震效果。避免对车体的强烈冲击;舵机采用了金属舵机,在对景点碰撞时减轻了舵机烧掉的风险,节约了设计成本;使用激光距离传感器,根据反光度的不一样,可以在高角度远距离来判定白线的外置,从而在平台上转弯是也能够依靠白线判定旋转的角度,使小车的行进路线更加精确;直接将车体小人使用铜柱固定,虽然有一定的质量,但是强度高,固定住舵机小人,避免行进时前后的晃动,使其几乎与主体车架结合为一体,在转弯和过跷跷板时晃动的程度减少很多。
但是本次设计的机器人中比以往设计做了一些改进的地方。舵机的电源改为独立供用,减少对主控电源的消耗,采用稳压模块输出5.5v为舵机供电,电池采用航模专用7.4V 850mah锂电池,电池经久耐用;舵机小人使用模拟的金属手臂,强度更加的高,且为半螺旋状不易弯折,在使用的过程中配合金属舵机方便的多,相对之前的较长较重的手臂更为灵活;主电池由尾部横放改进为中间竖放,把主控的位置升高,放于主控下,进一步的把车体中心与重心重合利于转弯和上跷跷板等。使机器人更加性能更加优化。旅游机器人的设计多我们在生活中可以得到广泛的应用,使运输行业变得更加节省时间,耗费人力少,达到自动化运输目的,使生活变得更加便捷。
[1]郭天祥.新概念51单片机C语言程序[M].北京:电子工程出版社,2009:98-103.
[2]谢自美编著.电子线路设计.实验.测试[M].武汉:华中科技大学出版社,2000.
[3]黄大志,薛飞,王磊等.旅游比赛用寻迹机器人的设计[J].机械与电子,2012(12).
注:本文受 国家自然科学基金资助(项目编号:61263002)。
猜你喜欢
当代工人(2020年18期)2020-10-09
初中生写作(2019年8期)2019-09-10
作文新天地(小学版)(2019年4期)2019-09-10
自动化学报(2019年6期)2019-07-23
电子制作(2018年1期)2018-04-04
少年文艺·我爱写作文(2017年10期)2017-10-25
制造业自动化(2017年2期)2017-03-20
专用汽车(2016年12期)2016-02-11
舰船科学技术(2015年8期)2015-02-27
山东工业技术(2014年20期)2014-10-21
