
基于STM32的智能交通灯系统
2016-09-16 08:27湖北民族学院聂云浩李景花
电子世界 2016年12期
湖北民族学院 聂云浩 邱 达 游 超 王 飞 李景花
基于STM32的智能交通灯系统
湖北民族学院聂云浩邱达游超王飞李景花
为了解决城市交通拥挤问题,本文进行了基于STM32微控制器与光电传感单元的控制智能交通灯系统的设计,其设计在于:包括STM32微控制器、光电传感单元、交通灯模拟单元、供电单元和信号采集单元;光电传感单元与微控制器相连,用于检测道路的车流量;信号采集单元与微控制器相连,用于收集道路车流量信息;交通灯模拟单元与微控制器相连,用于显示红绿灯的计时和微控制器的程序设定;供电单元,用于给微控制器、光电传感单元、交通灯模拟单元、信号采集单元等供电,当道路车辆增多,路况拥挤时,通过基于STM32的外部中断、内部中断算法对红绿灯可进行实时的动态改变,实行智能控制。
STM32微控制器;光电传感单元;智能交通灯系统
0 引言
交通灯控制系统是现代城市交通控制和疏导的主要手段,但目前绝大多数交通灯其时间都是设定好的,无论是车流高峰还是低谷,红绿灯的时间都固定不变。还有一些交通灯能根据简单划分的时间段来调整时间,但控制起来都不是很灵活,这使得城市车流的调节不能达到最优,随着交通需求越来越旺盛,而我国城市中小交通管理和交通安全的现代化设施却做得不足。智能交通系统主要是为解决人类交通因车辆的增多而日益拥堵带来的问题本章阐述智能交通系统(ITS)领域,特别涉及一种基于STM32单片机的信息采集与智能控制系统,通过对道路车流量信息的实时采集,在不同的车流量路况下,实现交通系统的红绿灯时间智能调节。
1 系统总体架构
本设计是一种基于STM32智能交通灯系统,其设计在于:包括STM32微控制器、光电传感单元、交通灯模拟单元、供电单元和信号采集单元。在十字路口相应的位置安装上红外传感器,以进行对车流量的统计,通过车流量检测的智能交通控制系统,是对十字路口红绿灯进行实时控制,减少十字路口车辆的滞留,提高道路的通率,缓解交通的拥挤。
系统的整体框图如图1所示:
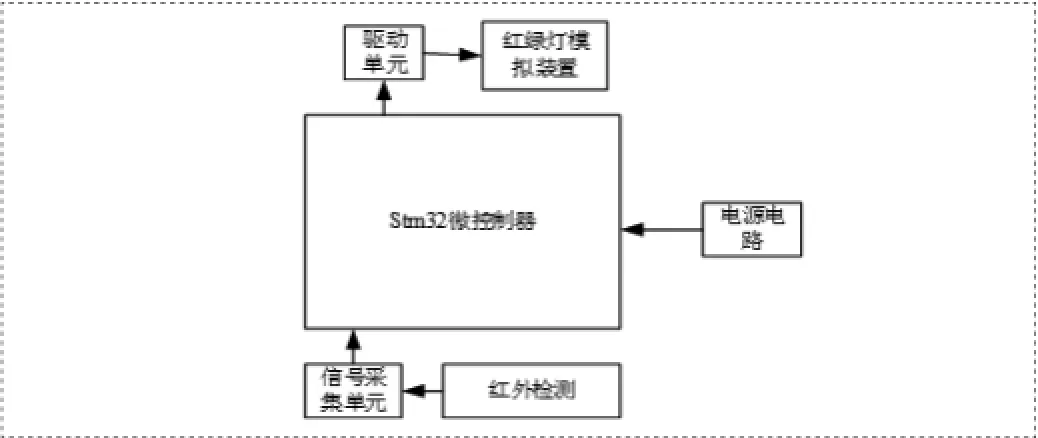
图1 系统整体框图
整个系统的工作原理是:通过算法实现智能交通信号灯的智能控制系统。智能交通灯控制系统通常要实现自动控制和紧急情况。通过采用基于单片机的交通灯控制系统的设计,实现以下功能:
(1)自动控制十字路口四组红、绿交通灯的状态转换,实现十字路口交通管理的自动化。
(2)根据车流量的实际情况, 固定信号周期自动调节红绿灯配时比例, 以尽量减少道路交通路口的车辆滞留, 实现交通灯的智能化控制。
2 系统硬件电路设计
硬件电路为整个系统搭建了平台,是整个系统实现的基础。该系统采用Stm32单片机为主控芯片,通过外部中断采集光电传感器的车流量计数,根据横向与纵向道路的车流量差别,内部中断实现红绿灯运行模式的切换,减少道路交通路口的车辆滞留, 实现交通灯的智能化控制。
2.1光电传感器检测电路
光电传感器是采用光电元件作为检测元件的传感器。它首先把被测量的变化转换成光信号的变化,然后借助光电元件进一步将光信号转换成电信号,在本系统实现中,当道路上有车辆经过时,光电传感器产生信号并传送给单片机进行车流量统计。
如图2所示为光电传感器检测电路。

图2 光电传感器检测电路
2.2微处理器STM32F103介绍
STM32F103处理器具有ARM32位Cortex-M3CPU,最高工作频率72MHz,1.25DMIPS/MHz。能进行单周期乘法和硬件除法,在片上集成32-512KB的Flash存储器,6-64KB的SRAM存储器,3个12位的us级的A/D转换器(16通道),2通道12位D/A转换器,最多多达11个定时器,最多多达13个通信接口,带有低功耗的特性,性价比较高,在本设计中优先选择。
3 智能交通灯系统的实现及软件设计
通过上述硬件系统的实现,构建模拟的交通系统模型如图3所示。

图3 智能交通系统模型图
为实现交通系统的智能调节设计如图4所示为智能交通系统的程序流图。
智能交通灯统程序设计流程图如图4所示,其主要包括:(1)红外检测:通过光电传感器检测道路的车流量。(2)外部中断:采集光电传感器的检测计数,通过对横向与纵向车流量的差异判断是否改变运行模式。(3)内部中断智能调节:单片机根据已采集的道路上的车流量改变运行模式,增加拥挤道路的通行时间以减少道路交通路口的车辆滞留, 实现交通灯的智能化控制。

图4 智能交通系统程序框图

图5 模式横向车道左转
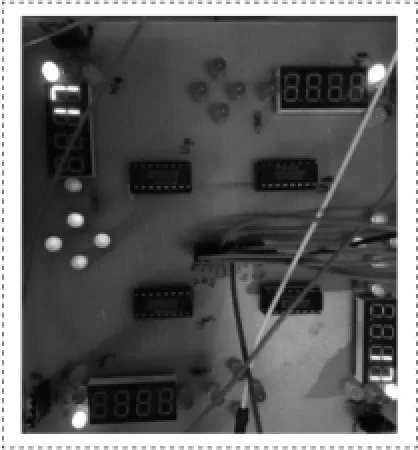
图6 拥挤模式横向车道左转
如图4所示的程序流程图,当横向车道数量超过纵向车道数量达到一个门槛值时(门槛值为50),且处于下一个红绿灯周期时,交通系统改变为拥挤模式,t1和t2对应横向车道左转时间和直行时间增加;next==1表征着下个红绿灯周期;相反的next==0表示本红绿灯周期。这是为了防止在红绿灯运行的本周期内,车流量超过门槛值时,引起红绿灯计时时间的跳变,同理纵向车道如此设计。如图5所示为交通系统在正常模式下的横向车道运行情况。
当横向车道数量超过纵向车道数量达到一个门槛值时,且处于下一个红绿灯周期时,交通系统改变为拥挤模式,t1和t2对应横向车道左转时间和直行时间增加,如图6所示。
4 结语
本系统基于STM32的智能交通灯系统,其特征是:在红绿灯运行时,当有车辆通过,信号采集单元输出一个幅值为3V左右的高电平,微控制器接收此信号并计数,十字路口处各进车车道都设有相隔间距为100米的信号采集模块,车道滞留车辆为前后两个模块计数值之差,当各车道滞留车辆未超过拥堵设置量时,十字路口处红绿灯以固定模式控制各路口车辆通行,当出现任一车道滞留车辆超过预设值,微控制器增加该车道通行时间;需要注意的是该系统是以固定模式运行,微控制器调节是在此模式上增加相应拥堵车道通行时间。在实践调节中,车流量的计数识别上仍然存在计数不全面的问题,所以该系统还需要更加精准的车辆识别技术,在后续的过程中将进行射频识别加入到系统中已实现更加精确的车量计数。
[1]杨佩昆.交通管理与控制[M].北京:人民文通出版社,1992.
[2]李明.基于微波检测器交通灯智能控制系统的研究与设计[J].西南民族大学学报(自然科学版),2007,33(4).
[3]张辉.8051单片机控制交通信号灯的方法研究[J].邵阳师范高等专科学校学报,2001,23(5).
湖北省大学生创新创业训练项目(201510517017)。
邱达。
猜你喜欢
中国信息化周报(2020年15期)2020-05-11
电子制作(2019年12期)2019-07-16
儿童故事画报·发现号趣味百科(2017年9期)2018-03-13
电子制作(2017年14期)2017-12-18
汽车文摘(2017年6期)2017-12-06
中国交通信息化(2017年9期)2017-06-06
文学少年(有声彩绘)(2017年1期)2017-02-14
电子制作(2016年21期)2016-05-17
数学教学通讯·初中版(2015年5期)2015-06-17
中国交通信息化(2014年6期)2014-06-05
