基于顶帽-底帽变换和二次图像分割的目标提取
2016-09-13 07:25杨漫
电子设计工程 2016年3期
杨漫
(河海大学 商学院,江苏 南京211100)
基于顶帽-底帽变换和二次图像分割的目标提取
杨漫
(河海大学 商学院,江苏 南京211100)
文中分别采用最大内间方差法、迭代法、二维最大熵法、KFCM单次阈值分割法和灰度均值区域生长法对坦克和卡车从背景中进行提取。针对单次阈值分割法和灰度均值区域生长法在提取目标时出现不能分割出车身投影或者大量丢失车体等问题,本文结合单次阈值分割法和区域生长法的优势,提出了基于顶帽-底帽变换和二次图像分割的目标提取算法。对比试验表明,该算法在较完整保留车体部分同时能去除车体的投影,很大程度上抑制了目标的形心漂移。
阈值分割法;区域生长法;顶帽-底帽变换;二次分割
图像分割技术研究,指依据图像的一些特性(如灰度强度、颜色、纹理等)将图像中的各个像素归类成互相都不相交的、具有某种相似性的均匀子区域的过程,是图像处理领域中的一项重要内容。本文根据分割方法的不同特点将其分为:基于边缘的图像分割、基于阈值的图像分割、基于区域的图像分割和结合特定理论的图像分割。近年来,在图像分割中随着人工神经网络、模糊集理论和图论等的广泛使用,产生了很多与特定理论结合的分割算法。
在图像分割的实际应用中有时还需要根据实际问题解决一些特定的分割问题。例如在本文所要提取的坦克和卡车目标中,如何在提取坦克和卡车目标的同时去掉投影分割也是需要研究的问题。针对此类投影分割问题,研究通过对投影建模等方法一定程度上有效的解决了分割投影的问题。然而如何寻找一种鲁棒性强,实时性好的投影分割方法也是现在一直在研究的问题之一。
1 基于单次阈值分割的目标提取
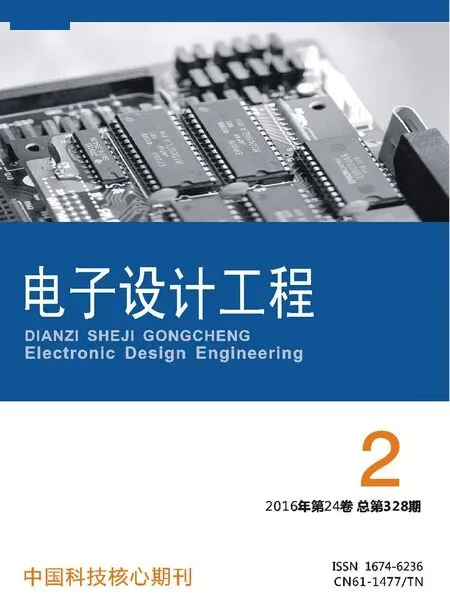
首先采用最大内间方差法计算出最佳阈值t1,用阈值t1将输入测试图片阈值化处理。阈值化测试图片如图1所示。由图1可知,坦克图片背景较为简单,只有少量杂草,说明采用最大内间方差法效果较好;而卡车背景较为复杂,有大量杂草,说明采用最大内间方差法的效果较差,阈值化后的图像中有大面积干扰区域,不利于后续目标提取。

图1 Ostu法阈值化结果:左为坦克图片,右为卡车图片Fig.1 Threshold value results of Ostu method:left for tank picture,right for truck picture
然后对阈值化后的图像进行形态学处理。测试图片面积最大连通域如图2所示,由图可知卡车图像中卡车并不是最大连通域。
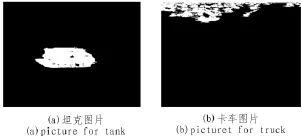
图2 面积最大连通域:左为坦克图片,右为卡车图片Fig.2 Largest connected domain:left for tank picture,right for truck picture
针对卡车图像干扰区域较为分散,而且干扰区域的许多连接处很细窄的情况,首先对阈值化后的图像的连通域进行标记,并对其作开运算,破坏干扰区域的大连通性;然后只保留开运算后二值图像面积最大的连通域为目标区域位置,如图3(a)所示。由于开运算在截断干扰区域细窄连接带的同时,也截取了卡车后轮底部的细窄处,为了提取完整的卡车图像,根据开运算前连通域的标记,取最大连通域开算运算前的区域为目标区域,如图3(b)所示。
由图3可知保留的连通域中都含有孔洞,用形态学的闭操作也很难填充完整。为此将图片取反,取反后面积最大的连通域为取反前的黑色背景区域,取反前的目标区域变成了取反后的背景区域,而取反前的孔洞则变成取反后的小目标区域,保留面积最大的连通域(目标区域)即可去除孔洞。去除孔洞后的图像如图4(a)所示。去除孔洞后的图像与原输入图像进行异或运算则得到最终目标物的提取。目标提取结果如图4(b)所示。

图3 二值图像最大连通域:左图为坦克图片,右图为小车图片Fig.3 Binary image maximum connected domain:left for tank picture,right for the car picture

图4 目标提取结果Fig.4 Target extraction results
2 基于灰度均值区域生增长法的目标提取
采用灰度均值区域增长法的首要目的是确定种子生长点。本文采用卷积法粗略定位坦克和卡车区域。首先将测试图像归一化到128×128像素,然后利用坦克和卡车的灰度级较背景低的特点分别对坦克和卡车采用60×30和50×30的全1模板与坦克和卡车做卷积,将卷积值最小处的模板中心定位初始生长点。为避免少量灰度级过高的地方引入的干扰(如坦克的五角星),卷积前将图像中像素值大于200的点的像素值设置为图像的平均像素值。
为加快卷积的计算速度,将卷积转换到频域中进行,也即计算Cf1f2=F-1(F·F2)。F为模板的傅里叶变换的共轭;F2为测试图像的傅里叶变换;F-1为傅里叶逆变换。定位种子生长点后对坦克图像和卡车图像的K=28,增长结果如图5(a)所示。然后对图5(a)用形态学闭操作增强细窄处连接;再取反后进行孔洞填充得到图5(b);最后提取区域如图5(c)。
3 基于顶帽-底帽变换和二次图像分割的目标提取
针对单纯的阈值分割算法在分割背景复杂、灰度变化不明显的图像时不能取得较好效果的情况,本文提出了基于顶帽-底帽变换和二次图像分割的目标提取算法。鉴于第一次阈值分割通常都会保留坦克和卡车的投影,所以第一次分割为“过分割”。“过分割”能将目标物、投影和自影一起分割出来。由于自影和投影像素很相近,直接采用一般的分割算法很难将其分开。为此在进行第二次分割前先将对其进行顶帽-底帽变换以增强对比度,然后再采用自动种子定位的区域生长法进行第二次分割。为简化计算,在第一次分割结果的基础上以最上、最下、最左和最右非255像素值点为界限提取感兴趣区域(ROI)作为子图用作后续分割。
然后对坦克和卡车图片的ROI区域进行顶帽-底帽变换以增强其对比度。本文采用半径为15的圆盘作为结构元素。对图4的坦克和卡车进行顶帽-底帽变换的结果如图6所示。
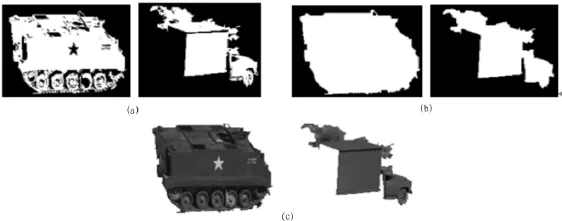
图5 灰度均值区域增长法Fig.5 Grayscale average regional growth method

图6 顶帽-底帽变换结果:左2为变换前图像,右2为变换后图像Fig.6 Hat-bottom cap transformation results:left 2 for images before transform,right 2 for images after transform
进一步分析坦克和卡车ROI的直方图(图7)可知,最低灰度级段都会出现第一个高峰,由于投影区域的灰度级较低,所以第一个高峰代表投影区域,而灰度级最高段的高峰则主要是白色背景导致的。同时由于直方图均呈现多峰分布,很难采用阈值分割法将投影去除的同时又尽可能少的去除车身部分。

图7 ROI区域直方图:左图为坦克,右图为卡车Fig.7 ROI area histogram:left for tank,right for truck
针对这一问题,本文对提高对比度后的图片采用自动种子定位的区域生长法去除投影。为使去除投影的同时尽可能少去除车身部分,本文把种子生长点放在投影区域。即先把投影当做目标,把坦克和卡车当做背景将投影提取出来,然后在ROI区域上去除提取出的投影区域即可把投影去除。自动定位种子点后采用灰度均值区域生长法来提取投影区域,而均匀测度K取为K=t2(ROI区域的直方图上找到第一个峰谷点的灰度级),提取结果如图8(a)所示;然后根据连通域的面积将8(a)中的小孔洞填满后进行形态学开运算断开细窄的连接带,再根据连通域面积去除小的孤立的连通域后得到8(b);其次从单次阈值分割中提取的目标去除提取的投影部分得到图8(c);再次根据连通域的面积去除小的孤立的连通域得到图8(d);最后将图8 d)与图4进行与运算即可得到最终的提取目标。
4 实验结果比较与分析
4.1阈值分割算法分析
本文测试了Ostu法、迭代法、二维最大熵法和KFCM阈值分割的效果,4种方法计算出的阈值如表1所示。3种阈值分割算法对坦克的分割效果都较好,而对卡车的分割都引入了大量背景,尤其是采用二维最大熵法分割卡车时将卡车的车身都当做了背景。这是因为,坦克的直方图具有一个明显的主峰和一个小的单峰,对于图像直方图为这种简单的双峰结构的图像,采用单阈值分割方法就能有比较满意的分割效果。而卡车图像的直方图为典型的多峰结构,多峰结构的直方图采用单阈值分割很难将目标与背景很好的分离。

图8 二次分割提取目标Fig.8 Re-segmentation image segmentation
4.2目标提取算法比较与分析
本文对提出的Ostu单次阈值分割法、迭代法单次分割法、二维最大熵单次分割法、KFCM、灰度均值区域生长法和基于顶帽-底帽变换的二次分割法均在测试图片上进行了测试,测试结果如图9所示。

表1 阈值计算结果Tab.1 Threshold calculation results
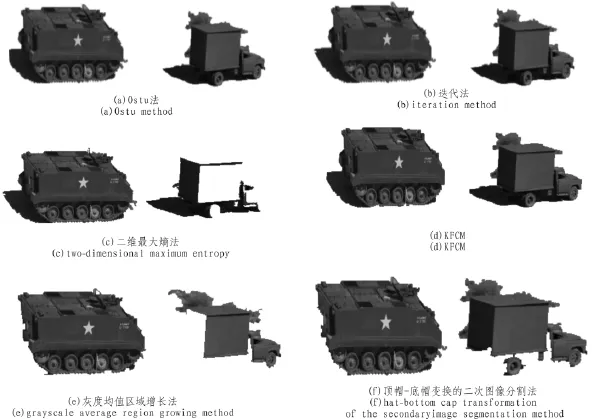
图9 6种算法目标提取结果Fig.9 Target extraction results of 6 kinds of algorithm
5 结 论
针对边缘检测算法的不足,本文首先采用单次阈值分割方法提取出了带有车身投影的目标,然后采用灰度均值的区域生长法提取出了去掉车身投影的目标。最后利用阈值分割和区域增长的优势并结合顶帽-底帽变换,提出了基于顶帽-底帽变换和二次图像分割的目标提取算法。实验表明,该算法仅去掉了少量车体部分,但去除了大面积投影。本文提出的算法具有以下特点:1)实时性较好,在去除少量车体部分的同时能去除车身的投影,大大减少了目标物的形心漂移现象;2)自适应性较强,能利用阴影的特点快速自动定位种子生长点和阈值K;3)简单且易于实现,不需要构建复杂投影模型来去除投影。
然而,本次对图像分割的研究也有很多今后需要深入研究的地方:1)对提取的阴影没有进一步处理。如图9(b)所示。怎么确定一种鲁棒性好的方法去除图9(b)中长条状的自影部分;2)没能去除车身附近少量的杂草。对于此问题,考虑利用坦克和卡车外形的先验知识,如何利用几何条件(如Hough变换直线检测)去除杂草也是今后需要继续研究的问题。
[1]J Bernsen.Dynamic thresholding of Grey-level lmages[C]//in:Proceeding of the Eighth International Conference on Pattern Recognition.Paris,France,1986:1251-1255.
[2]W Niblaek.An Introduction to Digital Image Processing[M]. Prentice Hall.Englewood CliffS.NJ,1986.
[3]J Sauvola and M Pietikainen.Adaptive document image binarization[J].Pattern Recognition,2000,33(2):225-236.
[4]B Gatos.I Pratikakis,S J Perantonis.Adaptive degraded document image binarization[J].Pattern Recognition,2006,39 (3):317-327.
[5]Kuo-LiangChung,Chia-LunTsai.Fast incremental algorithm for speeding up the computation of binarization[J].Applied Mathematics and Computation,2009,212(2):396-408.
[6]HUANG Deng-yuan,WANG Chia-hung.Optimal multi-level thresholding using a two-stage otsu optimization approach[J]. Pattern Recognition Letters,2009,30(3):275-284.
[7]Vincent L,Soille P.Watersheds in digital spaces:an efficient algorithm based on immersion simulations[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,1991,13 (6):583-598.
[8]ZHAO Qin-pei,YAO Li-xiu,CHENG Jian,et al.A novel color image segmentation based on color information and region growing[J].Journal of Shanghai Jiao Tong University,2007,41(5):802-812.
Target extraction based on the hat-bottom cap transformation and second image segmentation
YANG Man
(The Business School of Hohai University,Nanjing 211100,China)
This paper use the method of maximum amount of variance,iterative,two-dimensional maximum entropy,KFCM single threshold segmentation and grayscale average region to put the tanks and trucks segmented from the background growing respectively.To solve the problem of single threshold segmentation method and the grayscale average region growing method being not able to segment the car or lost some part in extracting target projection,this paper has combined the advantage of single threshold segmentation method and the region growing method,and has put forward a target extraction method based on the hat-bottom cap transformation and the second image segmentation.Comparison test shows that the algorithm can remove the bodywork projection while remaining the intact body,which can inhibit the target centroid drift to a large extent.
optimal thresholding;region growing method;hat-bottom cap transformation;re-segmentation
TN99
A
1674-6236(2016)03-0171-05
2015-03-28稿件编号:201503410
杨 漫(1988—),女,安徽宁国人,硕士,助理工程师。研究方向:人力资源管理。
猜你喜欢
学与玩(2022年8期)2022-10-31
数学物理学报(2021年1期)2021-03-29
小学生学习指导(小军迷联盟)(2020年12期)2021-01-05
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
学生天地·小学低年级版(2019年5期)2019-06-05
学生天地(2019年15期)2019-05-05
汽车观察(2018年12期)2018-12-26
小学生必读(低年级版)(2018年9期)2018-12-13
产品可靠性报告(2017年6期)2017-09-05
儿童故事画报(2017年4期)2017-05-26