
六轮支撑式管道机器人弯管通过性仿真分析
2016-09-13 09:01山西中北大学机械与动力工程学院陈伶闫宏伟范倩倩焦彪彪王朝阳杨晋
河北农机 2016年2期
山西中北大学机械与动力工程学院 陈伶 闫宏伟 范倩倩 焦彪彪 王朝阳 杨晋
六轮支撑式管道机器人弯管通过性仿真分析
山西中北大学机械与动力工程学院陈伶闫宏伟范倩倩焦彪彪王朝阳杨晋
针对管道机器人对弯管自适应性差的问题,建立弯管机器人虚拟样机装置模型,采用弹簧预紧支撑机构的有源调节方式,增强对管径变化的适应性。在Motion运动仿真环境下进行弯管约束条件下的仿真分析。通过对支撑轮上的速度曲线以及弹簧支撑机构线性位移曲线的分析,证明该机器人在弯管内移动的运动平稳性和可行性。通过比较不同条件下的试验结果,得出在弯管内稳定行走的影响因素。
弯管机器人;机构自适应性;虚拟样机;运动学仿真
引言
在现代工业发展中,1管道已经成为一种不可或缺的运输工具,管道机器人在恶劣环境下对管道内部的检测和维修,促进了管内机器人的发展。目前研制的管内机器人多是针对水平的直管以及倾斜30°以内的上升管道,但在变径管道、弯管上的研究才刚刚起步,通用性较差。因此对弯管内的机器人进行通过性和稳定性分析研究具有重要的实际意义。
管道机器人若想平稳地通过弯管处,关键在于尺寸几何约束和设计机构合理。而管道机器人仅从理论分析其通过性和运动平稳性是远远不够的,必须通过管道内的试验操作。运用仿真分析技术可以对管道机器人的运动状态和通过弯管进行动态模拟,不仅能观察其运动过程,还能在虚拟环境下进行结构修改,从而改善其性能,缩短产品周期,降低开发的成本[1-3]。
本设计通过SolidWorks软件建立计算机虚拟样机整体模型,并针对该产品的工作状况运用Motion插件进行弯管内的仿真分析[4],对弯管内的机器人的运动状态的和影响因素的分析提供了有效的方法。
1 虚拟样机建模
本次设计的弯管机器人由弹簧预紧支撑机构、动力机构、减速机构、丝杠螺母有源调节机构组成,如图1所示。
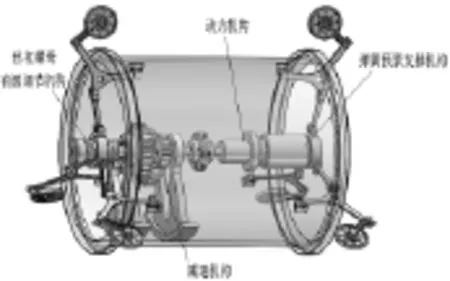
图1 弯管机器人机构模型
管道机器人若想通过弯管,则其整体机构单元尺寸需满足几何约束条件[5]:

式中,R—弯管曲率半径;
r—管道半径;
d—机器人外轮廓半径;
Lmax—机器人允许最大单元体长。
则机器人在弯管中的状态简化如图2所示。

图2 机器人通过弯管几何关系
在本设计中建立几何约束条件为长275mm,内径为265mm,适用于压差在2~4MPa的天然气管道内检测。机器人前后共有六个支撑轮呈对称分布,以提供足够的支撑力,后轮与连杆机构连接,通过弹簧被压缩提供支撑力,初始的支撑位置由电机带动减速运动机构通过丝杠螺母进行调节。
2 运动约束和仿真参数设置
在完成弯管机器人的建模后,进入Motion运动仿真环境。运动仿真之前,需要对建立的虚拟样机模型添加必要的运动约束和设置仿真参数。装配体模型在载入仿真环境时,软件系统会把已知的零部件之间的装配关系自动添加运动副和固定约束,如转动副、圆柱副、球面副、万向副和平面副。同时定义静止零部件和运动零部件,以及实体接触约束等[6]。
在仿真之前,将弯管设置为静止零部件,即固定显示。弹簧预紧支撑机构、动力机构、减速机构、丝杠螺母有源调节机构则设置为运动零部件,同时设置机器人的六个支撑轮与管道内部为实体接触。机器人机构材料选择为普通碳钢。然后,对质量单位、时间单位、仿真时间、重力加速度单位以及帧数等基本参数进行设定。因在本例支撑结构中为压缩弹簧支撑,故在创建虚拟弹簧时,选择弹簧类型为线性弹簧,弹性力表达式指数为1,弹簧常数设定为20N/mm,初始自由长度设定为35.54mm,其中弹簧的初始仿真长度即为弹簧的最小载荷长度,其所受载荷大小由压缩弹簧、弹簧套筒和伸缩装置单元体的重力确定。
由于本次研究内容为弯道机器人的
国家高新发展计划-863重大项目(2007AA06A415)
山西省自然科学基金资助项目(2013011026-2)
猜你喜欢
中国特种设备安全(2022年4期)2022-07-08
模具制造(2022年1期)2022-02-23
中学生数理化(高中版.高考理化)(2021年1期)2021-03-19
装备制造技术(2020年4期)2020-12-25
房地产导刊(2020年6期)2020-07-25
制造技术与机床(2019年11期)2019-12-04
制造技术与机床(2019年1期)2019-01-14
制造技术与机床(2017年8期)2017-11-27
中国棉花(2017年10期)2017-11-04
新高考·高一物理(2016年10期)2017-07-07
