
四旋翼无人机飞行控制系统设计
2016-09-13 09:01山西中北大学机电工程学院郭鲁奇顾强赵意鹏
河北农机 2016年2期
山西中北大学机电工程学院 郭鲁奇 顾强 赵意鹏
四旋翼无人机飞行控制系统设计
山西中北大学机电工程学院郭鲁奇顾强赵意鹏
本文设计了以STM32F103C8为主控芯片的控制系统,该系统通过MPU6050整合性六轴运动处理组件采集数据并进行滤波处理,再利用四元数姿态解算算法得到姿态角,使用HC-SR04超声波来测量飞行器高度,通过PID控制实现飞行器姿态和高度的控制。测试结果表明,该系统能使飞行器完成起飞、悬停、降落一系列动作,且稳定可靠。
飞行控制系统;MPU6050;HC-SR04;四元数姿态解算;PID控制
引言
四旋翼无人机是一种依靠4个呈十字形或X形分布的电动螺旋桨提供动力的飞行器,特别适合在近地面环境中执行监视、侦察等任务,具有广阔的军事和民用前景。因此,设计一套可靠性高的飞行控制系统就显得尤为重要。
1 控制系统组成及工作原理
本系统主要由电源电路、主控芯片STM32F103C8、无线射频模块nRF2401、超声波测距模块HC-SR04、运动处理组件MPU-6050及电机等部分组成,其结构示意图如图1所示。

图1 控制系统结构示意图
本系统以STM32F103C8为主控芯片,通过无线射频模块nRF2401向主控芯片发送起飞、悬停及降落等命令,当其收到命令后,主控芯片通过提取HC-SR04和MPU-6050的信号,利用四元数姿态解算法得出飞行器当前的状态,再通过PID算法,利用PWM调节电机的转速,直到达到所要求的状态[1]。
2 控制系统硬件设计
2.1主控芯片STM32F103C8
STM32F103C8是基于32位ARM Cotex-M3内核,最高主频率72MHZ,具有高达90DMips、1.25DMips/MHz的处理能力,Cotex-M3内核采用哈佛结构及流水线技术,很大限度上提高了控制器的运算能力,能够满足该控制系统复杂而快速的计算要求,同时该芯片功耗小、性价比高,能够满足本系统的设计要求。
2.2无线通信模块nRF2401
该模块是集收发一体的无线通信模块,工作在2.4~2.5GHz频段,具有高达2M的数据传输速率,在功率放大器的配合下,可以达到100m的传输距离,满足设计要求[2]。
2.3超声波测距模块HC-SR04
HC-SR04是可测量2cm~400cm范围的非接触式测距模块,包括超声波发射器、接收器及控制电路。工作时,通过给TRIG引脚大于10us的高电平,触发模块开始工作,自动发送8个40KHz的方波,并检测是否有返回信号,若有信号返回,则通过ECHO引脚发出一个高电平,高电平引脚持续的时间就是超声波信号从发射到返回接受的时间,则测量距离=(时间*声速)/2。
2.4运动检测模块MPU-6050
MPU-6050是集3轴MEMS陀螺仪、3轴MEMS加速度计及1个可扩展的数字运动处理器的运动控制传感器,具有I2C和SPI两种接口形式,可以满足多方面的需要[3],其连接电路图如图2所示。
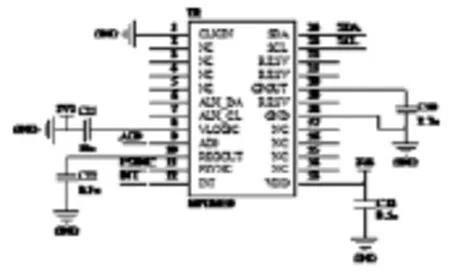
图2 MPU-6050连接电路图
3 控制系统软件设计
3.1主程序设计
通过对飞行器进行起飞、悬停及降落三个动作的飞行来验证所设计控制系统的可靠性。在给系统上电后,首先进行主

图3 主程序流程图
3.2四元数姿态解算
飞行器的高度通过超声波测距模块HC-SR04来获取,姿态由MPU-6050通过I2C总线传输,用姿态角来表示。姿态角是载体坐标系b相对于导航坐标系n的状态。假设飞行器上一点在载体坐标系b中的坐标是(Xb,Yb,Zb),在导航坐标系n中的坐标是(Xn,Yn,Zn),则有姿态变换矩阵Cnb满足:

四元数是由一个实数和三个虚数i j、k单位组成的超复数[5]。如果将坐标系b、n的三维矢量扩展成四维矢量,可以表示为:

结合式(1)和式(3)以及四元数的乘法运算法则可得到如下的转换关系:Cnb=
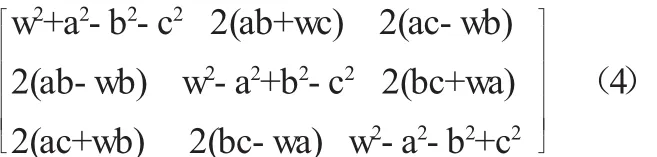
根据坐标变化理论,导航坐标系B依次旋转φ、θ、γ角度后可以得到载体坐标系A,从而得到方向余弦矩阵[6]:

那么综合(5)和(6)可得:

[7]得如下关系式:

其中ωABA为四元数形式的向量,表示载体相对于导航坐标系转动的角速度在载体坐标系上的投影,Qc是CBA对应的四元数。方程即为四元数微分方程,也可表示为:
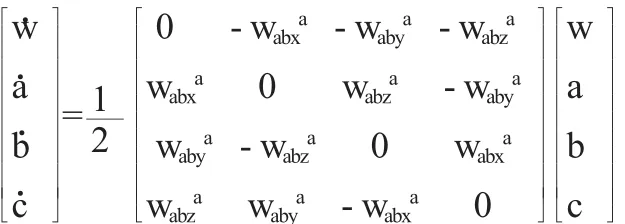
求解出该方程可得到四元数Qc。求出实时四元数之后结合式(4)(5)(6)(7)即可得到姿态角。
3.3PID控制算法设计
PID控制是根据系统的误差,利用比例、积分和微分计算出控制量进行反馈控制的算法。其控制框图如图4所示。

图4 PID控制框图
PID控制器的完整公式[8]是:

其中Kp、Ti、Td分别是比例系数、积分系数和微分系数,为满足数字控制系统的要求还需将其离散化:

其中k是采样次数,T是采样周期,进一步可以得到增量式PID控制:

其中,Ki=Kp(T/Ti),Kd=Kp(Td/T)从而可根据每次采样结束时ek、ek-1、ek-2的值可以计算出控制器的输出量。
本系统高度控制采用双闭环控制,内环控制的采样周期是5ms,外环是10ms,外环直接控制高度,为了避免外力影响,内环控制Z轴加速度,通过给定的重力加速度与Z轴加速度比较,输出控制量调节油门变化。高度PID控制如图5所示。

图5 高度PID控制
本系统姿态控制采用双闭环控制,内环控制的采样周期是2ms,外环是5ms,使得角速度控制较为灵敏,且抗干扰能力强,姿态PID控制如图6所示。

图6 姿态PID控制
4 系统测试
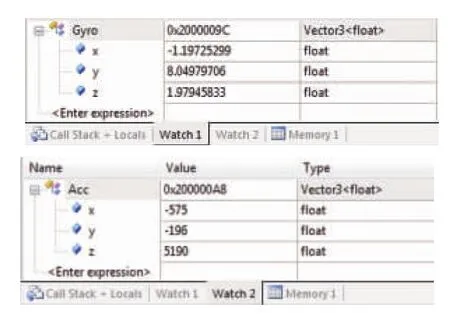
给系统上电后,先轻轻晃动飞行器,在Watch Windows窗口中,可以看到MPU-6050传回的数据,说明正常工作,如图7所示。接着给飞行器起飞命令,飞行器起飞,到达大约3m处,悬停10s,降落,完成预定的飞行轨迹。
5 结论
本系统以四元数姿态解算为载体,利用PID控制算法来控制飞行器的飞行,具有较高的精度和可靠性,对飞行器控制系统的后续改进具有一定的参考价值。
参考文献:
[1]谢义建,陈跃东,舒圣焱.基于STM32的四旋翼飞行器的设计与实现[J].四川理工学院学报(自然科学版),2014,27(3):42-45.
[2]陈志旺.STM32嵌入式微控制器快速上手[M].厦门大学出版社,2014:57-60.
[3]王福超.四旋翼无人飞行器控制系统设计与实现[D].哈尔滨工程大学,2013:8-9.
[4]郑震璇.基于PIC单片机的汽车空调控制器设计[J].机电技术,2009,2:37-40.
[5]孙贵斌,杨福清,方遒等.基于模糊PD控制的客车前大灯随动转向研究[J].机电技术,2015,8:121-126.
[6]史莹晶.航空飞行器控制与仿真[M].电子科技大学出版社,2011:28-31.
[7]李尧.四旋翼飞行器控制系统设计[D].大连理工大学,2013:37-38.
[8]胡寿松.自动控制原理[M].科学出版社,2007:121-134.
郭鲁奇,山东菏泽人,在读研究生,研究方向:机电系统设计与分析。控芯片GPIO、无线通信模块、电机及测量模块等的初始化,然后发送起飞命令,使飞行器飞行到3m高处悬停大约10s,最后降落地面[4],其程序流程图如图3所示。
猜你喜欢
凤凰动漫(军事大王)(2022年1期)2022-04-19
北京航空航天大学学报(2021年9期)2021-11-02
军民两用技术与产品(2021年9期)2021-03-09
学生天地(2020年3期)2020-08-25
电子制作(2019年9期)2019-05-30
汽车观察(2018年9期)2018-10-23
中国自行车(2018年8期)2018-09-26
电子制作(2018年2期)2018-04-18
北京航空航天大学学报(2016年8期)2016-11-16
小朋友·快乐手工(2015年5期)2015-06-06
