
基于模糊控制的蔬菜大棚环境控制系统的设计
2016-09-12 02:34牛甲熊刚郭东平
电子设计工程 2016年4期
牛甲,熊刚,郭东平
(杨凌职业技术学院 机电工程分院,陕西 杨凌 712100)
基于模糊控制的蔬菜大棚环境控制系统的设计
牛甲,熊刚,郭东平
(杨凌职业技术学院 机电工程分院,陕西 杨凌 712100)
本研究针对杨凌地区蔬菜大棚环境监控系统存在的问题,应用传感器技术、单片机技术、模糊控制和自动控制技术,设计制作了以单片机为控制核心的大棚环境控制系统,能根据作物生长需要,实现蔬菜大棚环境中的温度、湿度、光照、CO2浓度等环境参数的测控。测试结果表明,该控制系统有上升时间快、调节时间短、超调量小等优点,在实际运行中取得了较好的控制效果,具有较高的应用价值。
蔬菜大棚;模糊控制;单片机;传感器
陕西杨凌是我国唯一的高新农业产业技术示范区,在我国农业发展中占有重要的地位。截至2011年5月,杨凌现代农业示范区共投入6.3亿元用于发展设施农业,仅201O年建成的标准化日光温室就达2 759座、共391.3公顷,其中大部分是薄膜塑料大棚,相比以前新增蔬菜产量8万余吨,预计2011年上半年农民人均纯收入可达到6 300元,比2010年增长9.7%[1]。蔬菜大棚环境的调节可以提高作物的质量和产量,而目前杨凌地区温室环境参数的监测和控制仍以人工为主,导致劳动强度大,效果差、调控麻烦,影响农民的种植收益。
蔬菜大棚环境控制,即根据满足植物生长发育需要,自动完成大棚内温度、湿度、光照、CO2浓度、水分等环境条件调节的总称,实现作物早熟、增质、增产的目的[2]。蔬菜大棚所涉及的环境控制是一个复杂、庞大、多变量的非线性系统,很难对这类系统建立准确、统一的数学模型,而模糊控制系统的鲁棒性强,不需要建立准确的数学模型,适合于非线性系统的控制。因此,本文介绍了一种以C8051F340单片机为控制核心,使用模糊控制算法的蔬菜大棚环境控制系统。
1 整体结构
本控制系统采用自动模式与手动模式相结合的方式实现蔬菜大棚环境参数的控制。自动控制模式以单片机为控制核心,使用温度、湿度、光照强度、二氧化碳浓度等传感器对温室环境参数进行实时采集,并且把采集的信息传送给单片机,单片机将传感器采集到的数据信息分析处理后通过液晶显示器实时显示出来,然后经过模糊控制运算,输出相应的控制信号给执行机构,通过通风机、喷灌泵、补光设备、加热设备等执行机构的动作,实现对温室内温、湿度等环境参数的调节,满足植物生长需要。在自动控制模式出现故障时,手动模式启动人工控制执行机构,调节蔬菜大棚环境参数。控制系统结构如图1所示。
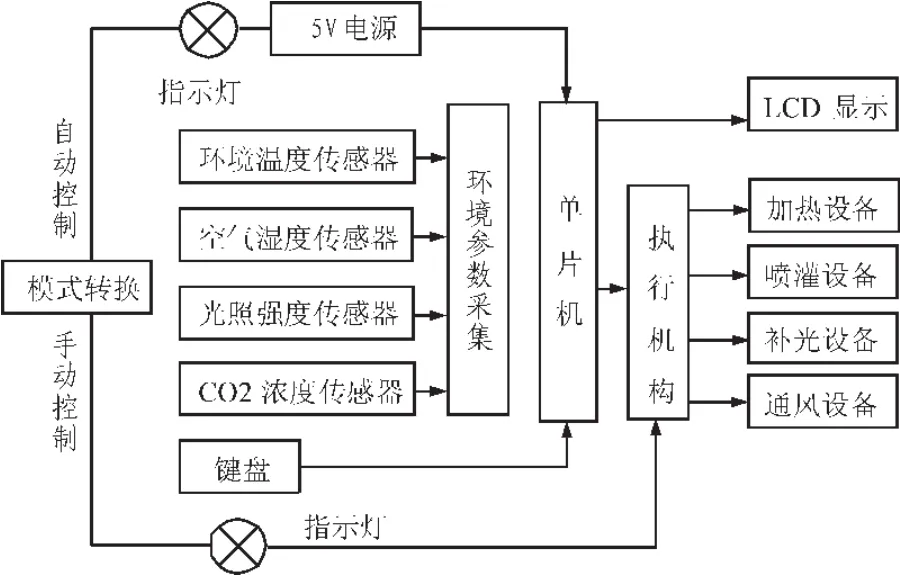
图1 系统整体结构图Fig.1 Structure diagram of the power control unit test system
2 控制系统设计
2.1 模糊控制器的设计
蔬菜大棚环境条件主要是温度、湿度、光照强度、CO2浓度等,考虑到成本的问题,对于CO2只是检测不控制,因此该模糊控制器的输入是三变量,分别是温度Tem、湿度Hum、光照Lux,输出有4个变量,包括ua、ub、uc、ud,分别用于控制加热设备、通风设备、补光设备、喷灌设备等执行机构。
输入变量的基本域分别取为 [tem1,tem2],[hum1,hum2],[Lux1,Lux2]以及输出控制量的基本域[ua1,ua2],[ub1,ub2],[uc1,uc2],[ud1,ud2]。同时设置三种状态对应的语言变量,如温度对应的是{冷,正常,热},模糊子集设置为{cold,normal,warm};湿度对应的是{干,正常,湿},模糊子集设置为{dry, normal,wet};光照强度对应的是{暗,正常,亮},模糊子集设置为{dark,normal,dazzle},执行机构对应的是{开,关},模糊子集设置为{on,off}。温度、湿度、光照以及所有输出控制量的基本论域分别取为[0,50],[0,100],[0,50000],和[0,1]。
然后以专家和工作人员的知识和经验以及专家和工作人员的实际控制过程为基础,得到的模糊语句的集合,形成模糊控制规则表。例如,当温度tem为low的情况下,湿度hum 为low、normal、high时,需要尽快消除偏差,此时控制加热设备工作ua取on,当温度tem为normal的情况下,为防止系统超调,首先要考虑稳定性,然后再明确输出的控制量ub。在系统实际的运行过程中,大棚环境条件温湿度、光照等输入量的组合都是利用模糊推理计算模糊控制器的输出控制量,即可生成制规则表[3],如表1所示。
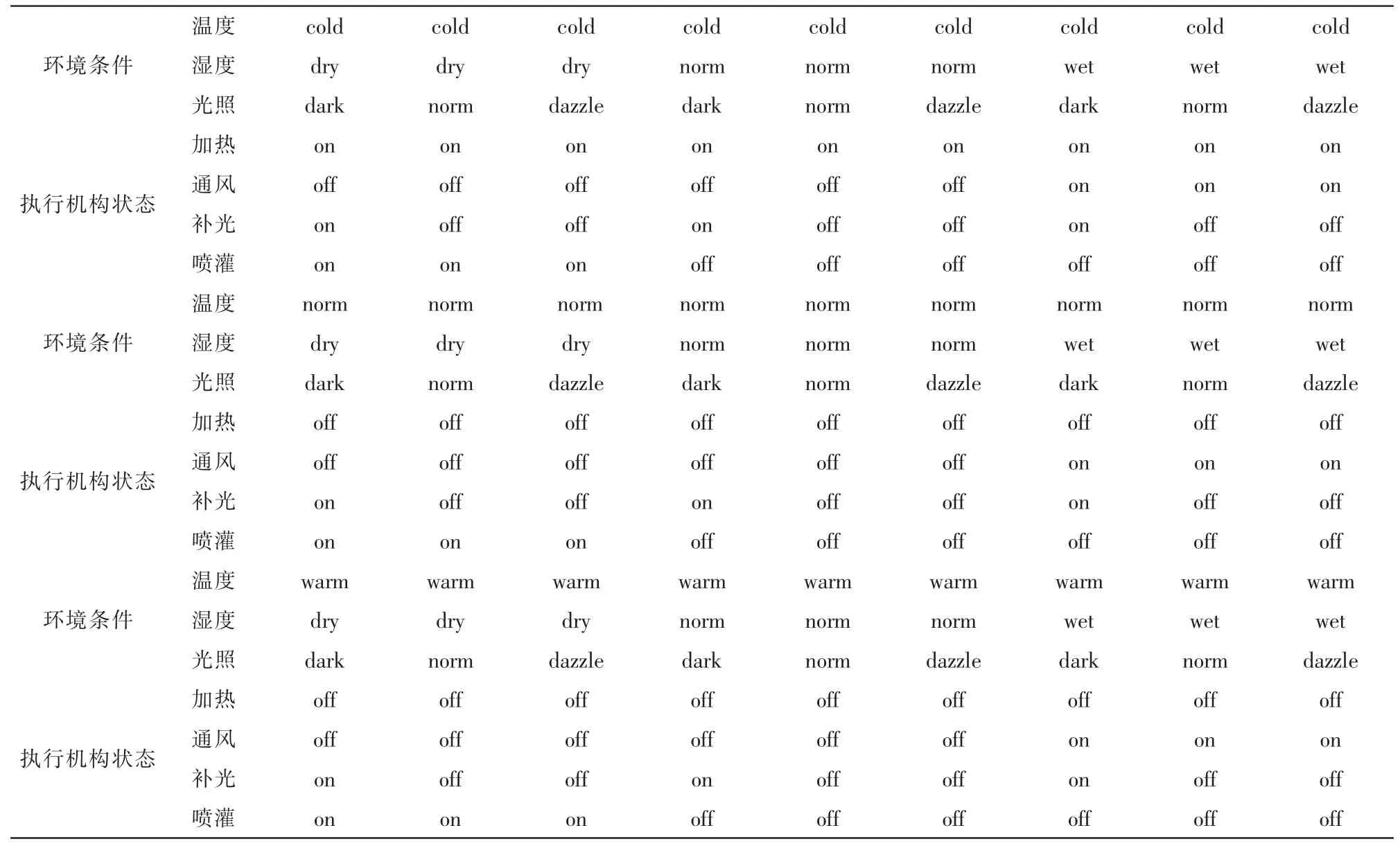
表1 模糊控制规则表Tab.1 Fuzzy control rules
对蔬菜大棚进行实时控制,必须把模糊量转化为精确量才能去驱动执行机构。为达到精确、灵敏的控制要求,本系统采用最大隶属度法计算出模糊控制的输出控制量。如果输出量的模糊集合C′的隶属度函数只有一个峰值,则取隶属度函数的最大值为清晰值[4],即:

如果输出量的隶属度函数有多个极值,则取这些极值的平均值为清晰值。该方法是最具有实时性的计算机去模糊化方法,它只取模糊子集中隶属度最大的元素作为模糊控制输出量,能够突出主要信息,简单易行。
上述过程是离线计算的,所以可以将最终的计算结果烧写到单片机的存储器中,在单片机运行时,根据传感器采集的环境条件信息,通过查表的方式获得被控对象的模糊输出量。
2.2 硬件设计
控制系统硬件电路采用模块化设计方法,包括单片机控制模块、环境检测模块、显示器模块、键盘模块等,主要硬件电路如图2所示。
控制系统采用C8051F340单片机为主控制芯片,该单片机完全集成的混合信号系统级芯片,具有与 8051兼容的微控制器内核,集成了数据采集和控制系统中常用的模拟部件和其它数字外设及功能部件。MCU中的外设或功能部件包括模拟多路选择器、电压基准、SMBus/I2C、定时器、数字I/O、看门狗定时器(WDT)和时钟振荡器等。所有器件都有内置的FLASH程序存储器和256字节的内部RAM,有些器件内部还有位于外部数据存储器空间的RAM,在嵌入式系统的设计中使用较为灵活方便[5-6]。
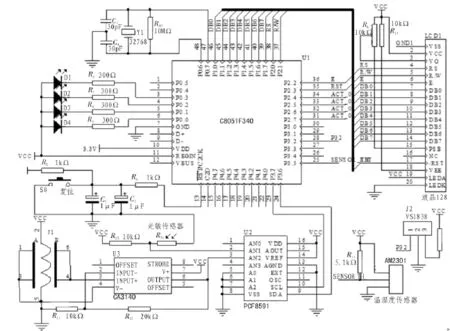
图2 主要硬件电路图Fig.2 Circuit diagram of the main hardware
环境监测模块中,温湿度传感器采用AM2301数字温湿度传感器,该传感器是一款采用专用数字模块采集技术和温湿度传感元件的复合传感器,包括一个电容式感湿元件和一个NTC测温元件,,可以与8位单片机直接连接[7-8];CO2的测量,采用MG811二氧化碳气体感应探头,经过电压放大器CA3140处理后与PCF8591连接,光照强度的测量采用光敏电阻作为感光部分,经过电阻分压后与 PCF8591连接,PCF8591是多通道输入AD/DA转换芯片,可以将电压信号转换成数字信号,单片机与PCF8591通过I2C总线进行数据通信,采集输入的模拟信号。
显示器采用低电压、低功耗、内含中文字库的12864液晶模块,用于显示环境参数等信息,该模块显示分辨率为128×64,内置8192个16*16点汉字,和128个16*8点ASCII字符集。具有硬件电路结构简单、显示程序简洁等特点,与单片机I/O直接连接进行数据及命令的传递,构成全中文人机交互图形界面[9-10]。
2.3 软件设计
软件设计采用模块化结构,将多功能的、复杂的程序划分为若干个简单的、功能相对较少的功能模块,每个功能模块又由相应的若干个子程序组成,实现特定的功能。程序模块主要包括主程序模块、键盘模块、显示模块、环境数据采集模块等,主程序主要用于协调各个功能模块之间的工作,使各个模块工作有序,保证程序的流程周而复始的可靠运行,实现系统的自动化运行,控制系统主程序流程图如图3所示。
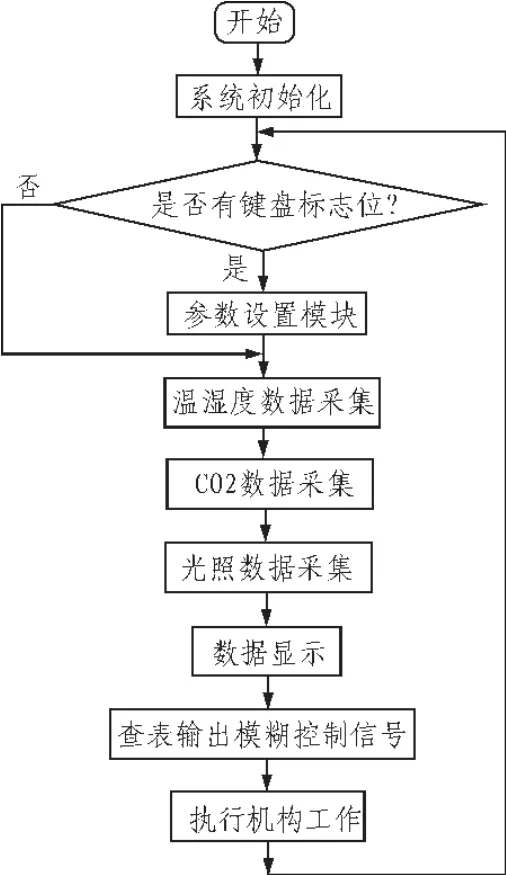
图3 主程序流程图Fig.3 Flow chart of the main program
系统上电后,首先进行初始化,然后判断有无键盘标志位,有键盘标志位则进入参数设置环节,接收键盘输入的键值,设置完后进入主界面;接着系统通过与温湿度传感器AM2301进行通信采集温湿度信息,采集完后调用AD转换程序与PCF8591通信,采集CO2及光照强度信息,数据经处理后,在液晶模块显示出来,然后再经过智能判断,输出控制信号,控制执行机构对蔬菜大棚环境进行调节,满足作物生长需要。
3 系统测试
系统设计完成后,制作调试样机,如图4所示,调试完毕后进行测试,测试场地选择陕西杨凌某闲置蔬菜大棚。

图4 主程序流程图Fig.4 Chart of the system test
测试时设定温度为 20℃、湿度为 70%RH(室外温度15℃、湿度为48%RH),选择两块测试区域A区、B区,A区采用传统的控制方式,B区采用加模糊控制器的方式,,每隔5 s记录一次数据,整理数据如表2所示。
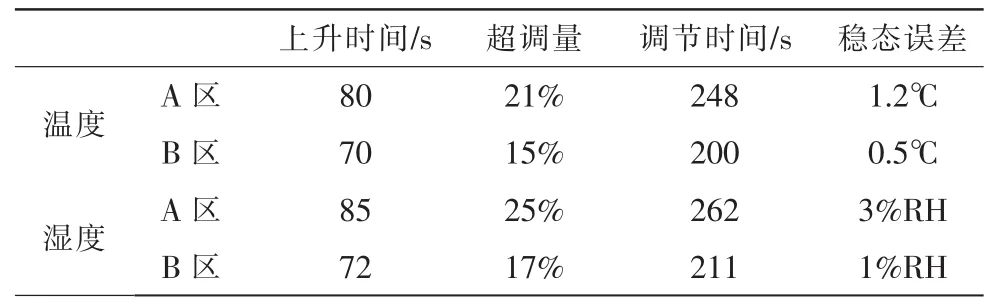
表2 系统数据测试结果Tab.2 Test result of system data
根据测试的数据,A区、B区的稳态误差差别较小,但是B区调节时间和超调量明显比A区降低许多,调节时间也减少了很多。采用模糊控制算法的控制系统缩短了过渡时间,提高了劳动效率,具有上升时间快、调节时间短、超调量小、稳态误差小等优点,达到了控制要求。
4 结束语
本文根据杨凌地区蔬菜大棚实际情况,结合单片机技术和检测技术,采用模糊控制方法,设计了蔬菜大棚环境控制系统,用于改善大棚蔬菜温度、湿度、光照等环境因子调控的问题,减少了人工操作的主观性和随意性,缩短了调节时间,提高了蔬菜大棚运行的自动化、智能化水平,在实地测试中取得了较好的控制效果,具有较高的应用价值。
[1]卢文曦,崔永红,黄佩.杨凌大棚西红柿种的植效益分析[J].广东农业科学,2011(17):175-187.
[2]韩毓.基于单片机的蔬菜大棚温度控制系统[D].青岛:中国海洋大学,2009.
[3]韩彩霞.模糊控制规则库优化研究[D].大庆:大庆石油学院,2005.
[4]常江.基于遗传算法的模糊控制器设计及应用[D].西安:西北工业大学,2006.
[5]曾军,吴长雷,李东,等.基于C8051F340的超声避障机器人设计[J].微计算机信息,2009,25(92):152-154.
[6]张兆朋,赵德安,邹应全.基于C8051F340的物联网智能大棚[J].农机化研究,2013(5):212-215.
[7]包丰华,岳仕达,闫冬旭,等.基于K60单片机的环境控制在畜禽舍中的应用[J].中国农机化学报,2013,34(6):261-264.
[8]李新春,许驰.基于WSN的粮库环境监测系统[J].仪表技术与传感器,2012(7):38-41.
[9]倪景峰,周腾,马恒,等.SMC12864液晶显示器在密闭监测系统中的应用[J].测控技术,2011,30(1):97-99.
[10]闫明,李欣,吴伟.基ARM7的LCD设计与实现[J].微计算机信息,2008,24(52):121-123.
Design of environment control for greenhouse based on fuzzy control
NIU Jia,XIONG Gang,GUO Dong-ping
(Department of Electromechanical,Yangling Vocational and Technical College,Yangling 712100,China)
The study for vegetable greenhouses problems of environmental monitoring systems in Yangling,application of sensor technology,chip technology,fuzzy control and automatic control technology,designed and manufactured to the Single Chip which is the core of the greenhouse environment control system,it could achieve intelligent operation according to the environmental parameters of the greenhouse,such as temperature,humidity,light,CO2concentration and so on.The test results show that the control system virtues of rapid rising time,short adjusting time and small surplus,has achieved preferable control effect in actual operation.
vegetables greenhouse;fuzzy control;single chip microcomputer;sensor
TN876
A
1674-6236(2016)04-0087-04
2015-04-08 稿件编号:201504080
牛 甲(1984—),男,陕西武功人,硕士研究生,讲师。研究方向:电气自动化控制技术。
猜你喜欢
今日农业(2021年14期)2021-10-14
当代陕西(2020年14期)2021-01-08
黑龙江工业学院学报(综合版)(2020年5期)2020-07-29
自动化学报(2019年12期)2020-01-19
当代陕西(2019年12期)2019-07-12
电子制作(2019年7期)2019-04-25
延河(下半月)(2017年7期)2017-08-08
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
