
基于激光传感器的路径识别算法与实现
2016-09-12 02:34王玲玲孙艳丽
电子设计工程 2016年4期
王玲玲,孙艳丽,王 康
(1.海军航空工程学院控制工程系 山东 烟台 264001;2.海军航空工程学院基础实验部 山东 烟台 264001;3.海军航空工程学院战略导弹工程系 山东 烟台 264001)
基于激光传感器的路径识别算法与实现
王玲玲1,孙艳丽2,王 康3
(1.海军航空工程学院控制工程系 山东 烟台 264001;2.海军航空工程学院基础实验部 山东 烟台 264001;3.海军航空工程学院战略导弹工程系 山东 烟台 264001)
在智能车研究中,激光头作为一种高精度、高实时性的传感器而广泛应用于识别路径信息。本文针对具体的赛道参数,设计激光传感器电路用以实现路径识别,并提出一种路径识别算法准确提取路径信息。经实验验证,该方法可行且具有较高精度。
激光传感器;路径识别;硬件布局;软件算法
智能车又叫做轮式移动机器人,是一种集环境感知、规划决策、自动行驶等功能于一体的综合系统,已广泛使用在科学探索、工业生产等领域[1]。智能车能够实现自主运行,其中重要的一环是其能够对周围环境进行识别并按照预期目的进行行走。目前智能车的识别方式主要有循迹、壁障、图像处理等,每一种方式又有其优缺点及独特的应用场合[2-4]。本文主要针对具有黑色引导线并带有弯道、坡道等特征的白色道路进行路径识别。
1 需求分析
智能车系统需要在如图所示的赛道上,通过传感器采集路径信息,并经过一定的程序处理,提取出黑线信息,使得智能车能够循线进行竞速赛跑。
通过分析易知,在整个系统中含有两种闭环控制,首先是循迹,即方向控制,要求能够通过传感器采集路径信息并根据信息自主行驶。其次是竞速,即速度控制,根据不同路况进行速度以及方向的改变,使其行驶过程又稳又快。这两种控制并不是完全独立的,二者存在耦合关系。例如在遇到弯道时,既需要方向控制改变行驶轨迹,也需要通过速度控制降低车速。文中着重于设计而非系统建模,因此先从能够完成功能需求的角度完成系统设计,对这种关系的解耦则通过程序上的算法和参数整定来实现。
2 系统硬件设计
为了完成上述的两种控制任务,整个智能车系统需要如图1所示的电路。除了基本的人机IO模块和必备的供电电路,单片机电路充当了逻辑控制单元,转向电路和电机驱动电路为各自控制里的执行元件,另外还需要路径信息和速度信息的反馈元件电路。
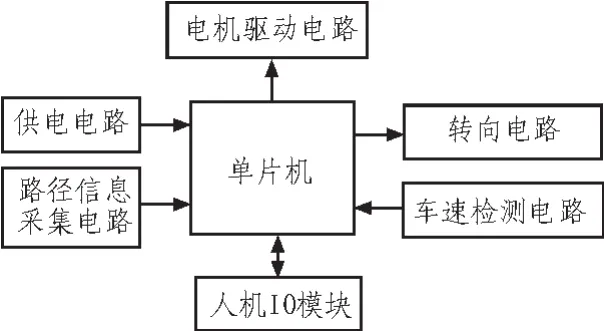
图1 硬件整体框图Fig.1 Whole block diagram of hardware
3 激光电路的原理及硬件设计
3.1 激光管的原理
根据赛道信息,跑道外铺以深色幕布,则对于赛道识别传感器来说,跑道主要区分为白色区域与黑色区域。如果使用激光管作为路径识别传感器,激光管发射激光照射跑道,跑道的白色部分与黑色部分具有不同的反射强度,此时根据激光接收管接收到的光线强弱,并设计相应的硬件电路,使得单片机通过接收端口的“0”“1”信息,区分反射的强弱光[5]。
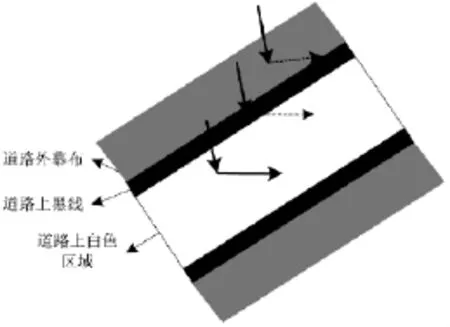
图2 激光管反射光示意图Fig.2 Light reflection of laser tube
由此可见,激光传感器由两部份构成,一部分为发射部分,一部分为接收部分。而接收部分之所以能只接收来自发射部分从赛道的反射光,是由于发射部分是由一个振荡管发出180KHz频率的振荡波,而接收部份由一个相匹配180 KHz的接收管接收返回的光。即激光传感器使用了调制处理,接收管只接受相同频率的反射光。
3.2 激光管的布局
根据上述的原理,一对激光发射接收管可以获得一个道路信息,同一时间如果要获得当前前瞻下的所有信息,则需要多对激光发射接收管的组合,这就是激光管的布局问题[6]。
首先根据文献,考虑简单易行性,选择“一”字型布局。其次肯定是要考虑道路的基本信息。根据要求,道路宽度(含黑线)约为450 mm,黑线宽度25 mm,分布于道路两侧。由此本文将“一”字型布局进行改进,即将激光对集中于两侧,使得能够获得较高的黑线提取精度,如图3所示。并且激光发射管的间隔也对赛道信息的提取具有一定的影响[6],过大则容易在间隔区出现空白现象,过密则不利于整体对传感器个数的要求及成本的考虑。根据经验选择间隔约18 mm。最后,采用三发一收的模式采集信息,及3个发射管对应一个接收管,并通过单片机实现分时接收。
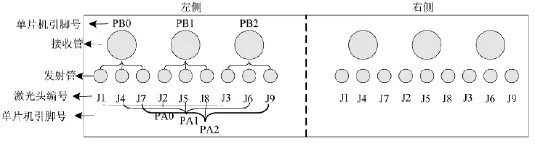
图3 激光管布局图Fig.3 Distribution for laser tubes
3.3 激光电路的硬件设计
3.3.1 发射部分电路
图4为一侧激光发射部分电路,以其中一组为例,包括激光头电路、驱动电路、反相电路。激光管的导通端接3 V电源,截止端每3个为一组,由单片机信号控制其分时点亮,如A1为低电平,则J1~J3亮,反之为高电平,则灭。
如上所述,激光发射管发出180 kHz频率的振荡波后,必须还要经过三极管放大,方可发射出激光,因此激光头的阴极A1需接入SN7452DP。SN7452DP是带有与非门的三极管,可以再接74HC04反相器将信号反相,如图4所示。一个SN7452DP有两组三极管放大,则左右两侧激光管A1~A6需要3片SN7452DP,且需要2片74HC04反相A1~A6共6路信号。
如此,单片机引脚PA0~PA5用以控制左右两侧共18个激光管分时点亮,若PA0~PA5为低电平,则激光管点亮。
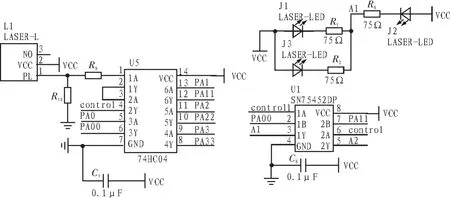
图4 激光发射部分电路(以一组3个激光头为例)Fig.4 Electrical circuit of laser emission(take a group of 3 lasers for example)
3.3.2 接收部分电路

图5 激光管接收电路Fig.5 Receiving circuit of laser tubes
图5为左侧激光接收电路,加上右侧共6路信号进入单片机引脚PB0~PB6。当激光照射到白色区域,接收管接收同频率光,则光敏管导通,PB0~PB6为高电平,反之为低电平。其中,PB0对应左侧J1、J4、J7的激光管反射情况,PB1对应左侧J2、J5、J8的激光管反射情况,PB2对应左侧J3、J6、J9的激光管反射情况,PB3~PB5分别对应右侧激光管的反射情况,如图所示。如此则在硬件上实现了激光路径识别。
硬件PCB布局可参照图3,由于PA0控制激光发射管J1、J2、J3,在布局时,J1、J2、J3每隔两个激光管布局,即单片机一个引脚控制3个位置的激光管发射激光,从而提高路径识别的分辨率。
4 激光路径识别的程序设计
4.1 总体设计
在主程序里,先是各参数初始化,单片机各项功能初始化,而后就是采用定时中断的方式,每10 ms一个中断,取读取并识别路径信息,而后根据路径信息调用舵机控制程序调整方向,调用电机控制程序调整速度。
4.2 路径采集设计
由于是三发一接的模式,因此如果需要读取所有的激光头的反射信息,需要三轮的读取操作,并且将读取信息根据激光头排列依次存入相应的存储位置后,而后根据所得的信息提取黑线。
如流程图6所示,每10 ms一个中断用来读取一轮激光头信息,并将信息存储在相应数组空间里,30 ms后一排共18个激光头的信息即被存储在数组a[1]~a[9],a[11]~a[19],且当为黑线信息时,赋值±2n用以区别不同位置的黑线信息。

表1 三组激光头采集数据记录表格Tab.1 Record of data collected by laser sensor in three teams
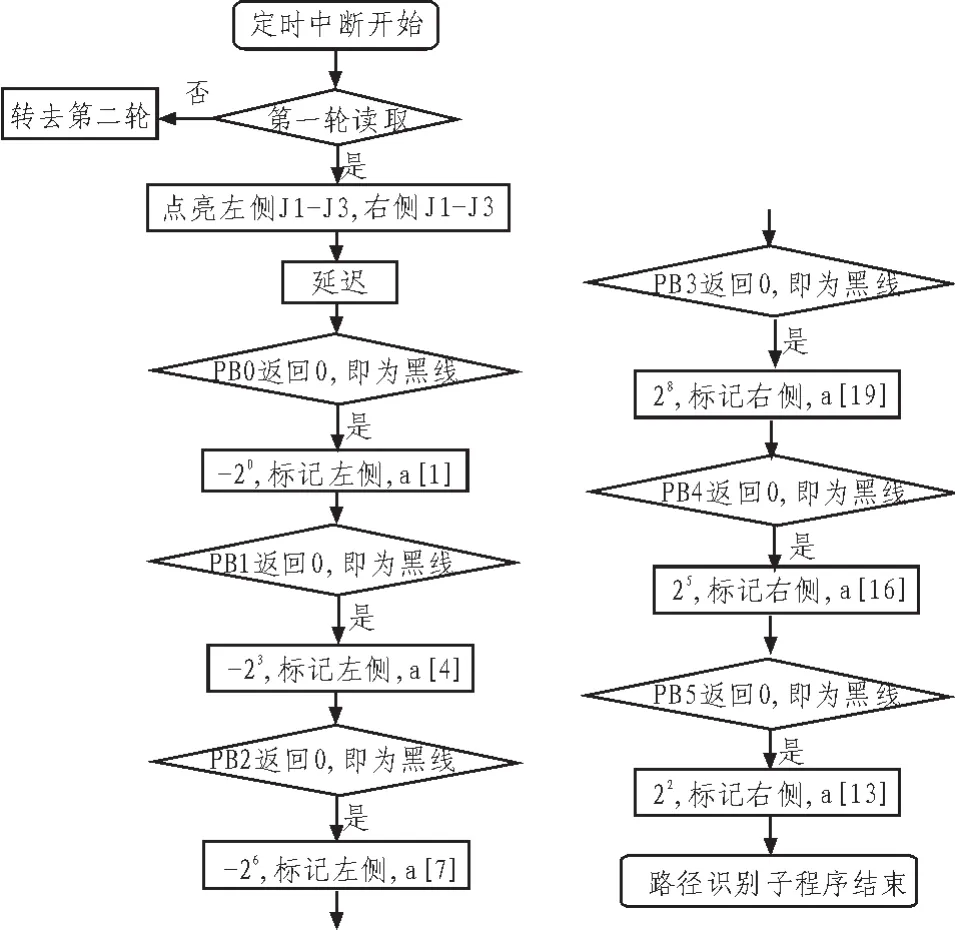
图6 激光路径识别算法流程图Fig.6 Flow chart of algorithm for path recognition of laser
之后,在主程序中可调用黑线提取子程序。先分左右侧,如左侧有标记,则表示黑线在左侧,若右侧有标志,则表示黑线在右侧,而后在左右侧分区段讨论黑线位置。例如,如果记录的黑线信息出现在-20~-23以及20~23,此时意味在直道部分;如果记录的黑线信息出现在-23~-25且右侧区域无黑线时,此时意味着赛道开始左弯,需要给控制舵机的PWM寄存器赋值并调用舵机PID子程序,使舵机相应左摆。可以看出,在此段程序编写中,区段越细化则分辨率越高。
5 结束语
经实验验证,文中所设计的硬件电路结合本文所提的路径提取算法,应用在智能车上,具有较高的可靠性和稳定性。本文方法电路设计比较简单,检测信息快,最大的优点是单片机易于处理。然而,激光传感器本身所带有的缺点,如易受外光源干扰、受限于道路信息、易损坏等。因此可以考虑使用其他路径获取方法,而将激光作为一种辅助检测手段,去检测道路中的路障等额外道路信息。
[1]梁静.一种基于光电传感的路径识别智能车[J].科学技术与工程,2011,11(1):39.
[2]卓晴,黄开胜,邵贝贝,等.学做智能车[M].北京:北京航空航天大学出版社,2007.
[3]章登鹏,谭彧.巡线导航智能车的路径优化[J].计算机工程,2011,37(1):184-186.
[4]张淑军,孟庆春,吴槟,等.移动机器人智能寻线导航与策略控制[J].控制与决策,2005,20(5):529-532.
[5]张迪洲,李增彦.基于激光传感器的智能车路径识别算法研究[J].电子设计工程,2012,20(18):51-52.
[6]吴怀宇.大学生智能汽车设计基础与实践[M].北京:电子工业出版社,2008.
Algorithm and realization of path recognition based on laser sensor
WANG Ling-ling1,SUN Yan-li2,WANG Kang3
(1.Department of Control Engineering,Naval Aeronautical and Astronautical University,Yantai 264001,China;2.Department of Basic Experiment,Naval Aeronautical and Astronautical University,Yantai 264001,China;3.Department of Strategic Missile Engineering,Naval Aeronautical and Astronautical University,Yantai 264001,China)
In the research of intelligent vehicle,laser sensor was widely used to identify the path because of its high precision and high real-time performance.In this paper,the electric circuit of laser sensor was designed to identify the parameters of specific path,and under this sensor distribution,a kind of algorithm was proposed to recognize the information of path accurately.It was demonstrated that this method was feasible and had higher accuracy.
laser sensor;path recognition;layout of hardware;algorithm of software
TN247
A
1674-6236(2016)04-0026-03
2015-03-15 稿件编号:201503202
王玲玲(1984—),女,安徽铜陵人,硕士,讲师。研究方向:自动控制原理与检测技术。
猜你喜欢
昆明医科大学学报(2021年6期)2021-07-31
科学(2020年5期)2020-11-26
少年文艺·我爱写作文(2020年11期)2020-11-23
电子制作(2019年13期)2020-01-14
电子制作(2019年15期)2019-08-27
电子制作(2019年11期)2019-07-04
电子制作(2019年9期)2019-05-30
小哥白尼(趣味科学)(2019年2期)2019-04-17
饮食与健康·下旬刊(2017年12期)2017-12-06
儿童故事画报·发现号趣味百科(2016年3期)2016-06-24
