感应电机分区弱磁控制方法分析
2016-09-12 08:02:48付兰芳付少波何惠英
电子设计工程 2016年6期
付兰芳,付少波,何惠英
(1.军事交通学院 天津 300161;2.河北工业大学 天津 300130)
感应电机分区弱磁控制方法分析
付兰芳1,2,付少波1,何惠英1,2
(1.军事交通学院 天津300161;2.河北工业大学 天津300130)
通过数学模型分析感应电机电压、电流和转矩的特点,研究弱磁控制中的电压轨迹,确定了分区的控制策略,即以电压变化相对应的空间电压矢量作用时间控制恒功率区给定参考电流,以d轴的最大电压控制恒压区的q轴电流限值,从而实现分区弱磁控制,实现了弱磁控制区最大转矩输出和鲁棒控制,且三区平滑过渡。对感应电机进行仿真实验,结果表明控制方法的可行性。
感应电机;弱磁控制;分区;电压轨迹
感应电机在作为动力牵引时,经常会运行于恒功率区,即转速高于基速,此时由于电源、变流器电压和电流的限制,多采用弱磁控制,即以降低磁通,满足提速的目的,但最大转矩也会随之降低。
研究感应电机弱磁控制时电压和电流的工作轨迹,当到达一定速度时,电机电流不能再达到最大值[1-2],能实现恒功率控制,所以感应电机弱磁区一般分为恒功率区和恒压区,在恒功率和恒电压区分别采用不同的控制策略,以实现弱磁区域电机的最大转矩的输出,并尽可能少的利用电机参数,增加控制的鲁棒性和实用性。
1 感应电机数学模型
以转子磁场定向的鼠笼式感应电机数学模型的电压方程、磁链方程、转矩和机械运动方程写为公式(1)~(3)所示,利用电机数学模型建立其仿真模型。当电机高速稳态运行忽略电阻时,式(1)~(3)可写为公式(4)。
下式中ud1、uq1、id1、iq1、ψd1、ψq1分别为定子dq轴电压、电流和磁链;
id2、iq2、ψr分别为转子dq轴电压、电流和d轴磁链;
ω1、ωr分别为同步电角速度和转子机械角速度;

2 感应电机弱磁控制分析
感应电机的弱磁控制就是在电机和变流器容量限制的条件下,超过基速运行时,以减小励磁磁通,达到提速的目的。感应电机在理想工作状态下,可实现如图1所示的电压电流和转矩特性曲线[3],按照速度可分为3个区,基速以下的区域为恒转矩区,即电压未达到限值,为提高带负载能力,多采用恒磁通控制策略,本文采用恒定励磁电流给定。当速度超过基准速度时,即电压达到限制值,不能随着速度的增加而增大,随着速度的增加,磁通减小,励磁电流也会随之减小,即进入弱磁区,弱磁区分为两个区域,一个是恒功率区,转矩电流可调,总电流可达最大;一个是恒电压区,也是深度弱磁区,此时随着速度增加,励磁电流减小,转矩电流也减小,电流不能达到最大,转矩与速度的平方成反比。
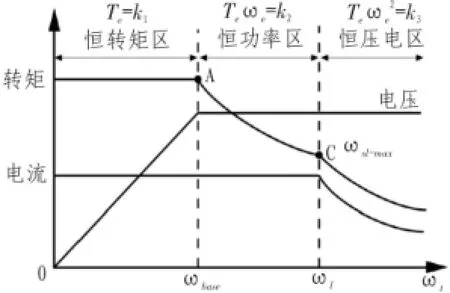
图1 电机的3个工作区的电压、电流和转矩
公式(5)是电机定子电压和电流限幅方程,将公式(4)代入即可得到公式(6),用电压表示的电流限制方程,在电压平面内画出电压电流限制圆如图2所示。
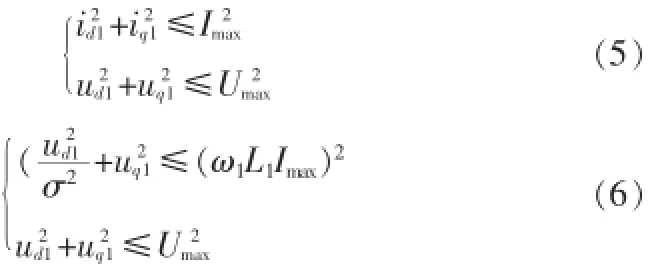
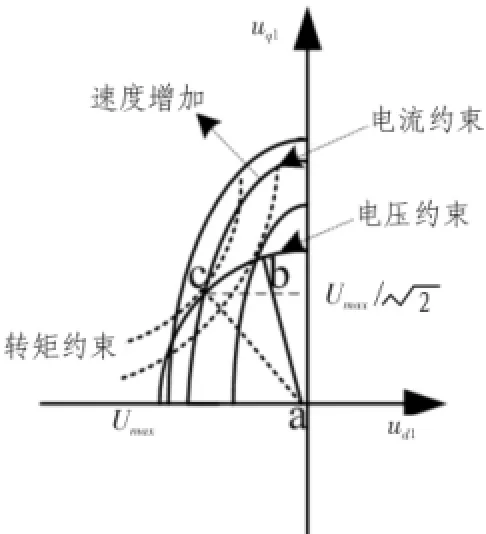
图2 电压平面内的电压与电流约束
3 感应电机分区弱磁控制
弱磁控制时,d轴电流的给定值按3个控制分区分别给定。
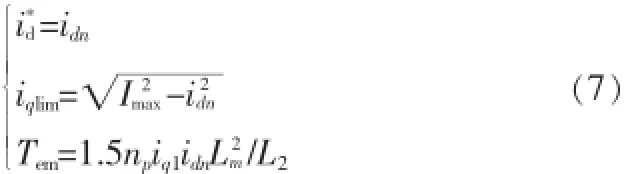
3.1恒转矩控制
恒转矩控制时,id的给定值恒定,即磁链恒定(为磁链的额定值),一般计算可用额定电压除以额定角频率估算额定磁链,然后利用式idn=ψr/Lm给出i*d。转矩只与电流的转矩分量iq有关,有关计算公式见式(7)。
3.2恒功率弱磁区
恒功率弱磁区,也是弱磁的开始区,电压达到最大限值时,随着速度的增加只有id减小才能满足电压方程;如图2 的bc段。随着速度的增加,由电流限制方程得到的电压约束椭圆随之增大,ud1负向增大,励磁电流的给定值i*d随速度减小,目前的研究有多种方法可实现弱磁时励磁电流给定。第一种是直接计算法,可根据公式(4)和公(5)联立求解得到公式(8)。第二种是按照弱磁原理图2所示,电压达到极限值即进入弱磁区,控制框图见图3(a)所示,得到参考励磁电流值[4]。第三种方法是利用SVPWM调制原理,当电压达到参考电压时,非零矢量的作用时间大于等于采样周期,控制如图图3 (b)得到励磁电流的参考值[5-7]。第四种方法,为提高控制的鲁棒性,减小参数的依赖,采用恒定电压控制法,即uq1恒定,一般取值为最大电压0.8~0.9倍,此时励磁电流根据(4)式随速度反比例减小。控制框图见图3(c)。转矩电流由负载决定,由于该分区为恒功率控制,电流可达到最大,转矩电流的限制值见式(8)的第二个式子。根据式(3)和(4)可以得到该分区的最大电磁转矩可写为式(8)的第三个式子。
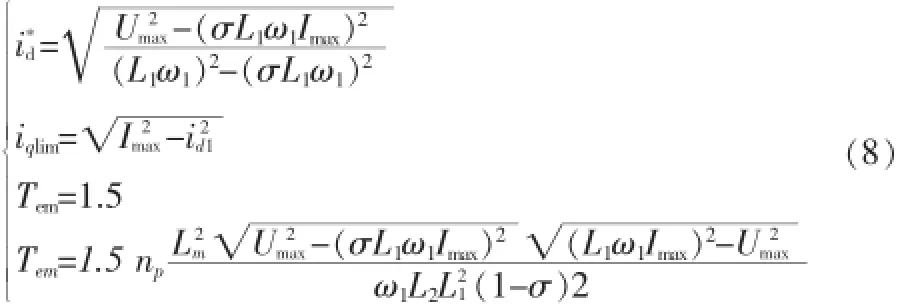

图3 励磁电流参考值的给定
3.3恒压弱磁区
对电磁转矩求极值,d轴电压和q轴电压相等时,即当电压轨迹随着速度的增加运行到c点时,电磁转矩将达最大值,因此将控制这一区电压保持在c点。深度弱磁区,依据转矩最大确定励磁电流,即式(9)中的第一个式子,转矩电流的极限值则根据此区电压电流的特点,按照电流法(公式9)或电压法(图4)可分别实现。
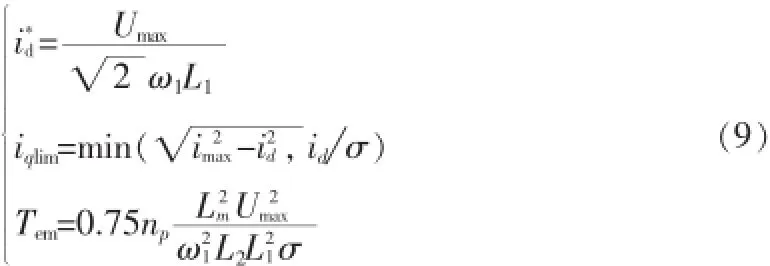

图4 最大d轴电压
4 仿真实验分析
应用matlab/simulink对三相异步电动机进行了仿真,图5是控制部分仿真框图,对于恒转矩区依然采用恒磁控制;恒功率区为增加系统的鲁棒性,采用空间矢量脉宽调制的时间等效电压控制法;恒压控制区,采用d轴电压环控制。对于电机参数为额定功率9 kW,额定电压45 V,额定频率100 Hz,额定转速 314 rads-1,互感 1.22 mH,定子漏感 0.035 69 mH,转子漏感0.035 69 mH,定子电阻0.013 Ω,转子电阻0.012 Ω。
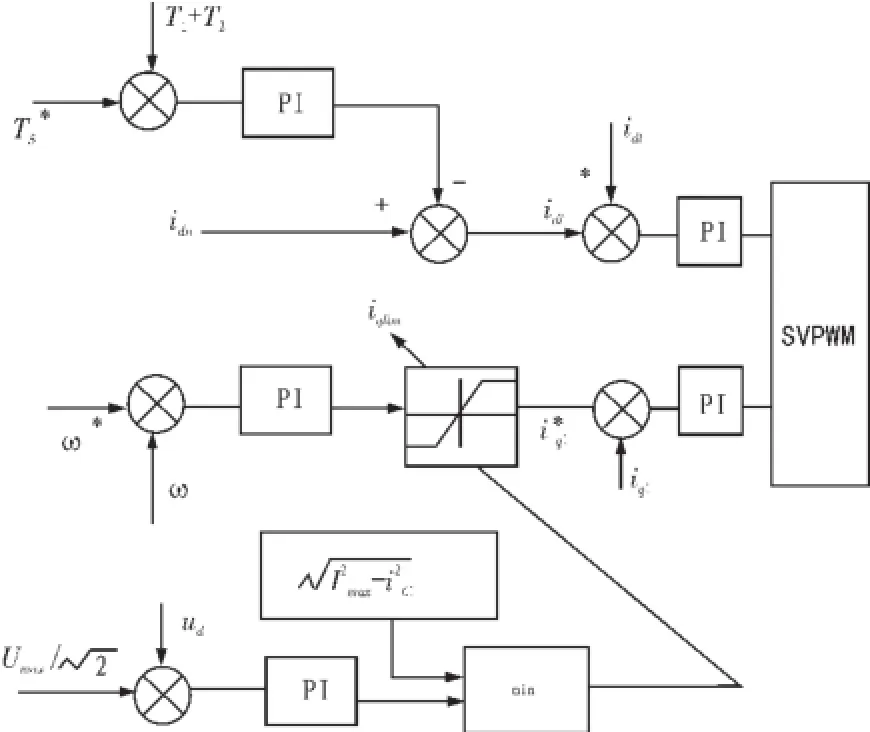
图5 控制仿真框图

图6 输出速度
图6是电机仿真的输出速度,参考速度是固定值700 rads-1。图7是电机的d轴电流及其参考值,可以看出在1.2秒左右进入恒功率弱磁区,电流从恒定值开始减小;图8是d轴电压,在2.6秒左右进入恒压弱磁控制区。电机在弱磁控制过程中,电流的参考值,与电机参数无关,具有较好的鲁棒性,恒压弱磁区,电压恒定在最大转矩点,可实现最大转矩。
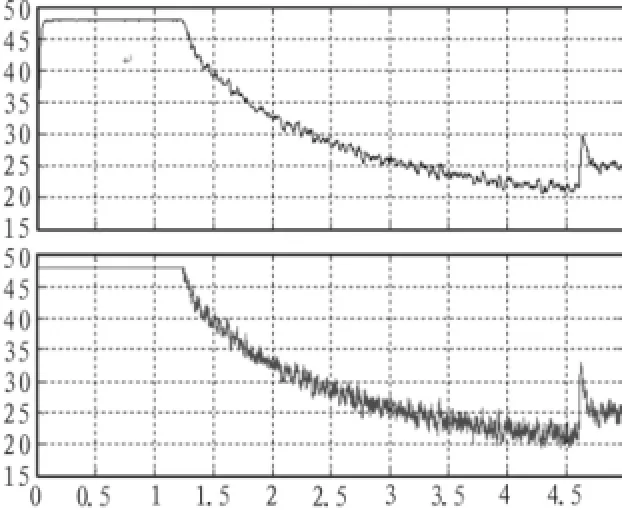
图7 d轴电流及其参考值

图8 d轴电压
5 结束语
从异步电机转子磁场定向控制的稳态数学模型出发,分析了电机在不同区域运行时电压、电流、转矩特点以及控制方法,特别是弱磁区中的恒功率和恒电压控制,根据弱磁区中电压轨迹的特点,确定了弱磁区控制策略,该方法尽可能少的依赖电机参数,保证电机最大输出转矩,并且实现了三区的平滑过渡。
[1]伍岳,仇磊.电动汽车驱动控制策略研究综述[J].汽车实用技术,2014,(3):1-7.
[2]Lin P Y,Lai Y S.Novel voltage trajectory control for fieldweakening operation of induction motor drives[J].IEEE Trans actions on Industry Applications,2011,47(1):122-127.
[3]谭延良,胡燕娇,盛碧云,等.纯电动汽车交流感应电机控制系统设计[J].电气传动,2012,42(4):7-9,14.
[4]李珂,张承慧,崔纳新.电动汽车电驱动系统高速区快响应控制策略[J].电工技术学报,2007,22(6):41-47.
[5]Mengoni M,Zarri L,Tani A,et al.Stator flux vector control of induction motor drive in the field weakening region[J]. IEEE Transactions on Power Electronics,2008,23(2):941-949.
[6]陈琼良.电动汽车感应电机的弱磁控制方法研究[M].重庆:重庆大学,2011.
[7]樊扬,瞿文龙,陆海峰.一种考虑负载转矩的异步电机弱磁控制策略[J].清华大学学报:自然科学版,2009,49(4):473-476.
Induction motor zoning field-weakening control method
FU Lan-fang1,2,FU Shao-bo1,HE Hui-ying1,2
(1.Military Transportation University,Tianjin 300161,China;2.Hebei University of Technology,Tianjin 300130,China)
Based on the mathematic model of the induction motor,analyze the characteristics of voltage、current and torque. Research voltage trajectory of field-weakening control,determine the zoning control strategies,that is the work time of space voltage vector control given reference current in constant power region,the d-axis voltage controlling the q-axis current limited value in constant voltage region,in order to achieve partition field-weakening control and a maximum torque output and robust control,and to achieve a smooth transition of the three districts.Induction motor simulation results show the feasibility of the control method.
induction motor;field weakening control;zoning;voltage trajectory
TN0
A
1674-6236(2016)06-0185-03
2015-05-12稿件编号:201505102
军事交通学院院校基金(2014D15)
付兰芳(1970—),女,河北承德人,硕士,副教授。研究方向:电机控制与电力电子技术。
猜你喜欢
环球时报(2022-03-29)2022-03-29 17:14:11
河北电力技术(2021年2期)2021-07-29 09:16:30
四川冶金(2018年1期)2018-09-25 02:39:26
知识经济·中国直销(2018年7期)2018-07-27 02:49:52
电子制作(2018年1期)2018-04-04 01:48:34
大电机技术(2017年3期)2017-06-05 09:36:02
通信电源技术(2016年1期)2016-04-16 04:57:26
电测与仪表(2015年8期)2015-04-09 11:50:16
电测与仪表(2015年7期)2015-04-09 11:40:16
电机与控制应用(2015年3期)2015-03-01 03:49:59