高速摄像技术在火箭橇头罩分离试验中的应用
2016-09-12 11:45孙海波王晓斌吴瑞斌
航天器环境工程 2016年3期
孙海波,王晓斌,吴瑞斌,肖 健
高速摄像技术在火箭橇头罩分离试验中的应用
孙海波,王晓斌,吴瑞斌,肖 健
(北京强度环境研究所,北京 100076)
火箭橇头罩分离试验中,需要采集头罩分离前后的高速图像。由于火工品爆炸时间短,振动与冲击环境恶劣,普通摄像设备难以满足要求。文章介绍了一种小型化、低功耗、能够适应强振动与冲击环境的高速摄像系统,该系统由具有Camera Link接口的工业相机、图像采编单元和数据存储单元组成,图像采编单元对工业相机图像数据进行编码,并通过LVDS接口传输至数据存储单元;数据存储单元使用FPGA控制SATA接口固态硬盘实现无损图像数据的实时存储。通过减振和自动调光设计,此系统能够适应强振动与冲击环境,并能自动快速适应各种光照环境,已成功应用在某火箭橇头罩分离试验中,实现了分辨率为800×600、帧率为
120帧/s的连续图像存储,存储时间不低于30min,存储的图像数据完整可靠。
高速摄像;图像采集;图像存储;Camera Link接口
0 引言
高速摄像相对于传统试验测量手段,可以更直观地观察试验的全过程。在某火箭橇头罩分离试验中,需要对头罩附近图像进行高速、长时间的采集与存储,同时要求摄像系统小型化、低功耗,并能够适应强振动与冲击环境。K. Mochiki等人在中子透射光谱成像试验中采用大容量缓存和固态硬盘实现了105帧/s的超高速图像存储,但是该系统基于PC机,体积很大[1]。美国Vision Research公司和德国Optronis公司均推出了高分辨率、高帧率的小型化图像采集存储产品,但是价格昂贵。国内对小型化的高速图像采集存储技术有一定的研究,但是目前还没有形成成熟的产品。中国科学院长春光学精密机械与物理研究所通过FPGA控制2块IDE 固态硬盘实现了Camera Link相机的640×480、100帧/s 的图像存储[2]。王仕明博士采用PowerPC+FPGA+SSD架构,实现了100MByte/s的实时数据存储,并采用JPEG2000编码技术实现图像压缩,可达到1000MByte/s的图像数据带宽,但是有损压缩会使图像部分细节丢失[3]。
本文研制了一种高速无损压缩的图像实时采编摄像系统,即采用基于FPGA的LVDS(Low- Voltage Differential Signaling)接口来控制具有Camera Link接口的工业相机的图像数据采集,对采集的图像数据进行编码,并通过LVDS接口发送至数据存储单元。数据存储单元采用基于SATA接口的固态硬盘,最高存储速度可以达到90MByte/s[5]。该单元还增加了相机参数设置功能,以实现分辨率、帧率、曝光时间等参数的设置,而且可以兼容任何厂家的Camera Link接口相机;增加了时统信号输入接口,以方便后期数据处理时辨识开始采集时刻;进行了减振和自动调光设计,使得系统能够适应较强的振动与冲击,以及低照度和强光照的环境。与国内外其他系统相比,本系统可对高速图像进行无损压缩、实时、长时间采编与存储,且体积小、功耗低。
1 系统组成
高速摄像系统的组成如图1所示,由Camera Link接口工业相机、图像采编单元和数据存储单元组成。Camera Link是一种标准接口,多数高速相机均采用该接口方式[6]。图像采编单元通过RS422接口接收来自数据存储单元转发的相机参数指令,通过Camera Link接口实现相机的参数设置和图像的采集、编码功能,最后利用LVDS接口将数据发送至数据存储单元。数据存储单元采用基于SATA固态硬盘的高速数据存储模块[5]接收、解码LVDS数据,将数据存储至SATA接口固态硬盘中,并将来自上位机的相机参数指令转发至图像采编单元。数据存储单元通过千兆以太网接口完成相机参数传输、存储、控制和数据上传等功能。
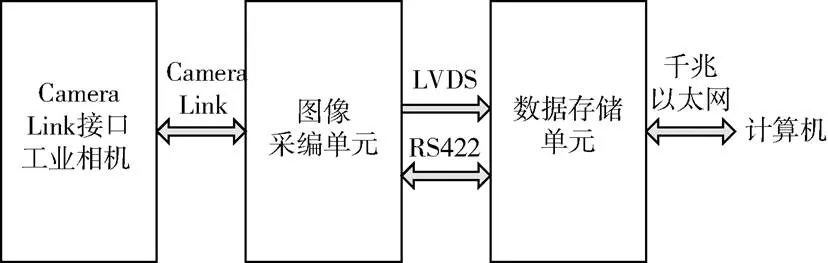
图1 高速摄像系统的组成
2 图像采编单元
2.1 图像采编单元组成
图像采编单元由Camera Link接口、图像编码和LVDS数据发送3个模块组成,如图2所示。
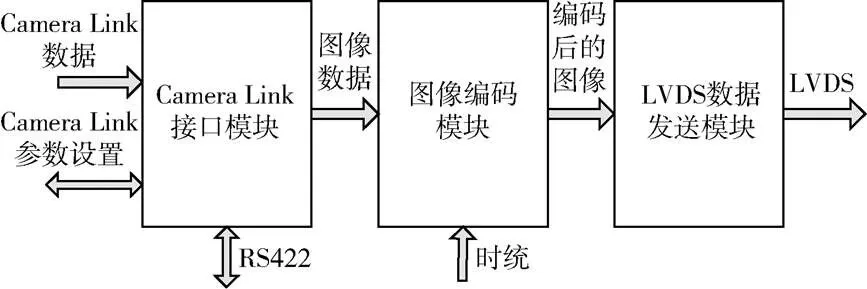
图2 图像采编单元组成
Camera Link接口模块实现Camera Link接口的LVDS串行数据转换为并行数据。利用FPGA内部丰富的解串器(ISERDES)、锁相环(phase locked loop, PLL)和延时(IODELAY)资源,可实现2∶1~16∶1的数据解串[7]。通过RS422接口接收数据存储单元转发的相机参数指令经Camera Link接口发送至相机,可设置相机的分辨率、帧率、曝光时间等参数。
图像编码模块完成图像数据的采集和图像帧、数据帧的编码功能。时统信号用于和其他测量系统保持时间同步。
LVDS数据发送模块将编码后的数据帧通过LVDS接口发送至数据存储单元。
下面仅介绍图像编码模块,其他部分见文献[4]。
2.2 图像编码模块
图像编码模块负责图像数据(图像帧和数据帧)采集与编码。图像帧编码用来标记每一帧图像,以便后期图像数据的恢复和丢失检验;数据帧编码用于和数据存储单元的数据格式相匹配,方便数据存储单元的数据判读、接收以及丢失检验。
图像编码模块的组成如图3所示。虚线左侧为Camera Link接口模块的LVDS_clk时钟域,实现图像采集和图像帧编码功能;虚线右侧为LVDS数据发送模块的tx_clk时钟域,执行数据帧编码和数据发送功能。两时钟域之间采用FIFO传递数据。
其中,LVDS_clk速率为80MHz,tx_clk速率为75MHz,由于FIFO的写入速度大于读取速度,需要设计足够容量的FIFO保证数据不丢失。以120帧/s、分辨率为800×600的图像为例,使用LVDS_clk传输1帧图像需要6ms,在该时间内,FIFO的写入数据量为80MByte/s×6ms=480kByte,读取数据量为75MByte/s×6ms=450kByte,二者相差30kByte,为留有一定的余量,选择深度为65535的FIFO。
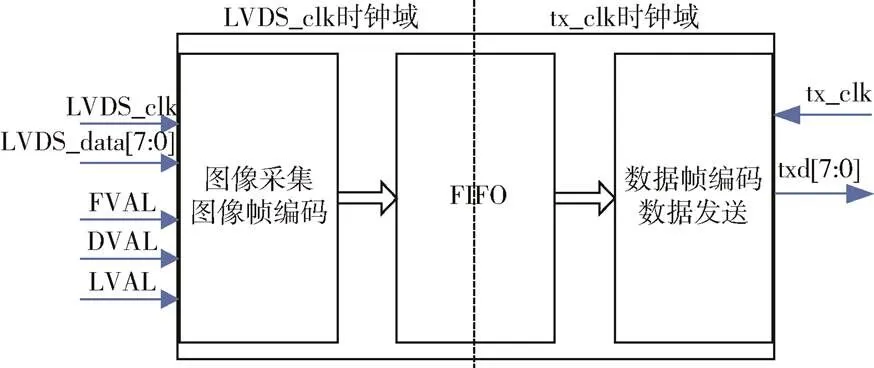
图3 图像编码模块组成
Camera Link接口模块输出的图像信号时序如图4所示。FVAL信号上升沿,表示1帧图像数据有效;当DVAL信号有效时,在每个LVDS_clk的上升沿,输出1次有效的图像数据。

图4 图像信号时序
图像编码模块从Camera Link接口模块采集1帧完整的图像数据后,再添加帧头、帧计数、帧长等内容,组成1图像帧(见表1),并将图像帧数据发送至FIFO缓存。当时统信号到来时,图像帧计数清零,用于标识关键时刻。当FIFO的深度达到4096(数据存储单元要求的数据帧的长度)时,读取FIFO中的数据,并添加帧头、帧计数、帧长、帧尾等内容,组成1数据帧(见表2)。最后将数据发送至LVDS数据发送模块。在图像帧格式中,以分辨率为800×600的图像为例,1帧图像的数据量为240000字,用1字表示帧长,这里采用总数据量除以16,即0x3A98。图像帧的帧计数为16位累加数据,当时统信号有效时,帧计数清零,以方便后期数据处理时区分时统有效时刻。后期将存储的数据上传至计算机,通过帧头、帧长和帧尾等信息完成数据的解析,最终还原成BMP格式的图像。即使图像数据中含有0xEB90、0xEB91等数据,但是通过结合帧长、帧尾等信息,可以保证上位机软件不会造成误判。

表1 图像帧格式
3 数据存储单元
对于分辨率为800×600,帧率为120帧/s的无压缩图像,数据存储量为55MByte,普通的存储方法难以满足要求。这里采用基于SATA接口的固态硬盘作为数据存储单元[5],其组成如图5所示。
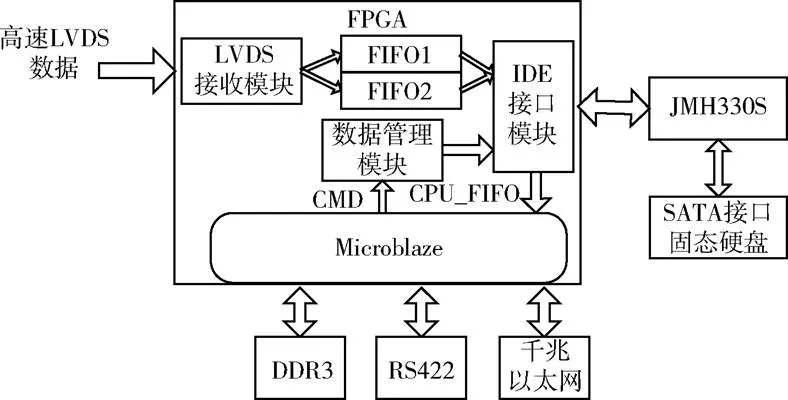
图5 基于SATA接口固态硬盘的数据存储单元组成
数据存储单元的工作原理为:存储数据时,FPGA内部的LVDS接收模块接收LVDS数据流并转换为并行数据,数据通过大容量FIFO1和FIFO2交替输入IDE接口模块,最后通过JMH330S芯片控制固态硬盘进行高速存储。读取数据时,IDE接口模块将读出的硬盘数据存入CPU_FIFO中,MicroBlaze软核通过DMA方式再将数据读入DDR3内存,并通过千兆以太网发送至上位机。用户可通过千兆以太网设置相机参数,并经过RS422接口将参数转发至图像采编单元。在LVDS接收模块和IDE接口模块之间的2个大容量FIFO,深度均为2M,利用DDR3 SDRAM使2个FIFO交替向IDE接口模块写数据,能实现数据缓冲,提高数据存储效率。
FPGA通过Ultra DMA5(uDMA5)方式读写硬盘。下面以该方式为例,描述写硬盘的过程,其流程见图6。根据ATA-6协议[8],初始化时,FPGA通过命令将IDE传输方式设置为uDMA5。每次Ultra DMA进行写操作时,首先设置48位起始逻辑地址和将要写入的扇区数,然后通过向状态控制寄存器的写命令0x35启动1次Write DMA操作。硬盘接收到该控制命令后,会向FPGA发送DMA 请求(DMARQ)信号,FPGA收到DMARQ 有效信号后,使能DMACK#进行应答并撤销STOP信号,在硬盘的DMA就绪信号(DMARDY#)有效后,FPGA开始读取FIFO中数据并驱动数据同步信号HSTROBE以及16位并行数据。写完数据后,进入空闲状态,继续等待上层的指令。
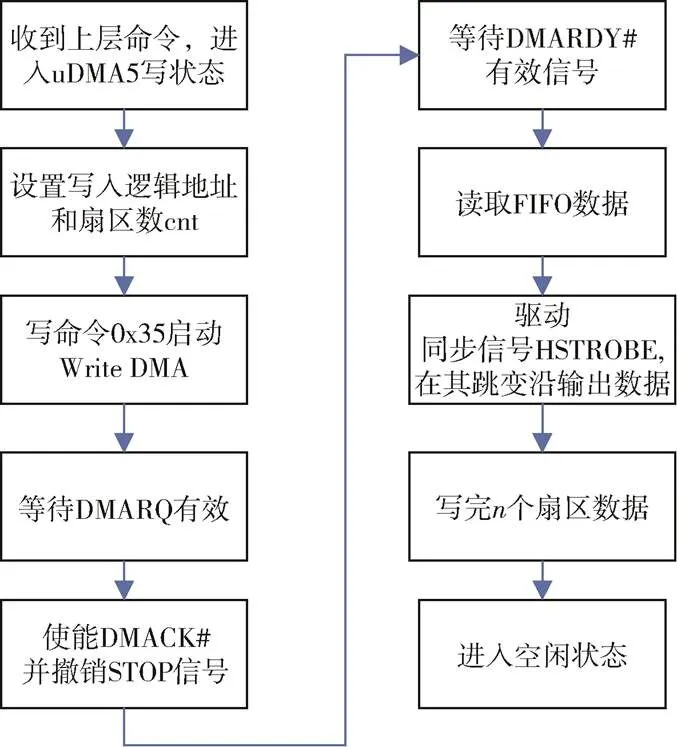
图6 uDMA5方式写硬盘流程图
经测试,数据存储单元的最高连续存储速度为90MByte/s,无丢包或误码现象。
4 减振设计
火箭橇头罩分离瞬间产生的振动和冲击较大,电路板上的元器件和工业像机的光学组件耐振动与冲击能力较差,需要进行加固和减振设计:采用数据采编存储器和相机模块分离的结构,在数据采编存储器内部使用硅胶灌封;在工业相机和壳体之间使用橡胶隔离(如使用硅胶,则液体可能会进入工业相机的光学镜头内部影响相机使用)。图像采编存储器和相机模块之间使用专用的Camera Link线缆连接。加固后的图像采编存储器和工业相机实物见图7。

图7 加固后的图像采编存储器(左)和工业
相机(右)实物图Fig. 7 The image acquisition and coding unit(left) and industry camera(right) after being reinforced5 自动调光
火箭橇头罩分离前后光照度的变化范围很大:头罩分离之前,火箭内光线非常暗;而头罩打开后,相机会暴露在外界较强光照下,这就需要图像亮度的自动调节功能。通常用调节光圈或曝光时间[9-10]
来调节图像亮度。调节光圈需要使用电机,而电机调节速度较慢,并且振动和冲击的环境适应性较差。
本文采用动态步长曝光时间调整技术[9],原理如下:设置图像的目标亮度值0(本文取150),根据当前图像的平均亮度与目标亮度之间的差Δ来确定曝光时间的调整步长Δ。具体调整方式如式(1)所示:
计算图像的平均亮度时,先使用32位寄存器缓存1帧图像的亮度和,再使用除法器计算平均值。式(1)中,Δ的符号和Δ的符号相反,即Δ>0时,表示当前图像过亮,Δ为负数,即应减小曝光时间。在Δ较大时,说明曝光时间远不能达到目标亮度要求,因此Δ也应加大,以便提高算法收敛速度。
实际测试中,在非常暗的光线下,即使将曝光时间调整至最大值,也难以看清图像。故本文增加了LED补光灯,当光照度低于10lx时,自动开启补光灯。通过自动曝光技术和LED补光相结合的方法,可以适应大多数光照环境。
6 试验结果和分析
本文的高速摄像系统采用Baumer公司HXC40高速工业相机,分辨率设置为800×600,帧率设置为120帧/s。高速摄像系统通过高低温试验、三轴随机振动试验、峰值为100持续时间为11ms的半正弦三轴冲击试验、过载试验(3个方向,35)以及低气压试验(1Pa)等地面环境试验充分验证了其环境适应性。
在某次火箭橇头罩分离试验中,该高速摄像系统成功拍摄到整个头罩分离过程。头罩分离瞬间的连续图像如图8所示,其中第2、3、4幅图像能够看到火工品爆炸,从第4幅开始,头罩已经开始分离。由于帧率为120帧/s,两帧图像间隔8.3ms,由此估计火工品爆炸时间约为30ms,和实际吻合。经过其他数据采集设备测量,头罩分离时产生的冲击为186,并具有持续的高量级振动和过载,普通的摄像设备难以经受如此严酷的环境。经过时统信号分析,冲击峰值时刻和图像拍摄的爆炸时刻吻合。按照要求,本高速摄像系统主要作为后期故障分析手段,本次试验共拍摄了试验前后30min的图像,拍摄到的图像完整可靠。试验结果充分验证了本文设计的高速摄像系统的可靠性。

(a) 第1幅(分离前)

(b) 第2幅(火工品爆炸瞬间)

(c) 第3幅
(d) 第4幅

(e) 第5幅(开始分离)
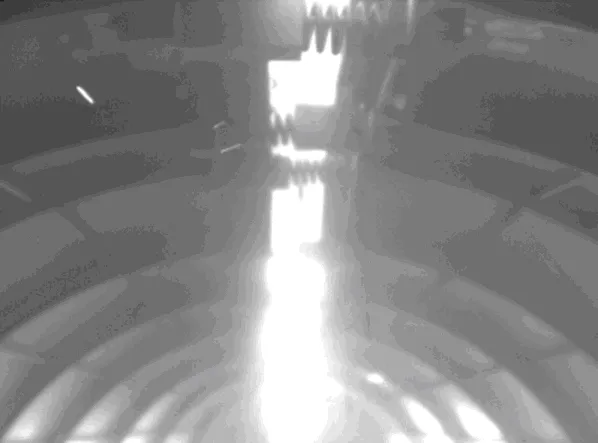
(f) 第6幅
图8 火箭橇头罩分离的图像
Fig. 8 Image of rocket shell separation7 结论与展望
本文的高速摄像系统首次在火箭内部成功拍摄了火箭橇头罩分离的全过程,获取了以往试验无法获取的信息,对丰富试验手段、提升试验能力具有重要意义,尤其对试验事故后的故障诊断具有很大帮助。该系统可以实现高速、长时间、高可靠性的无损图像采集与存储,并且结构简单、体积小、功耗低、高振动与冲击环境适应性强,能够自动快速适应各种光照环境,在航空、航天等高速图像采集记录和图像分析领域具有广阔的应用前景。
该系统最高存储速度为90MByte/s,最高可实现帧率为196帧/s、分辨率为800×600的图像采集。为了进一步观察头罩分离的细节,需要提高图像的帧率,下一次试验拟将图像帧率提升至190帧/s。
(References)
[1] Mochiki K, Ishizuka K, Morikawa K, etal. Development of a new high-frame-rate camera for pulsed neutron transmission spectroscopic radiography[C]//Proceedings of the 10thWorld Conference on Neutron Radiography, 2015(69): 143-151
[2] 吕耀文, 王建立, 曹景太. Base型Camera Link 脱机存储系统设计[J]. 光电子技术, 2012, 32(4): 242-245
Lü Yaowen, Wang Jianli, Cao Jingtai. Design of base camera link video storage system independent of computer[J]. Optoelectronic Technology, 2012, 32(4): 242-245
[3] 王仕明. 基于PowerPC的高速图像存储系统技术研究[D].
成都: 中国科学院光电技术研究所, 2015
[4] 孙海波, 吴瑞斌, 王晓斌, 等. 一种高速图像实时采编存储系统设计[J]. 遥测遥控, 2015, 36(3): 41-45
Sun Haibo, Wu Ruibin, Wang Xiaobin, et al. Design of high-speed real-time image acquisition-coding and storage system[J]. Journal of Telemetry, Tracking and Command, 2015, 36(3): 41-45
[5] 孙海波, 王晓斌, 李雅梅. 基于SATA接口固态硬盘的高速存储系统设计[J]. 遥测遥控, 2014, 35(2): 48-52
Sun Haibo, Wang Xiaobin, Li Yamei. Design of high-speed storage system based on sata interface solid state hard disk[J]. Journal of Telemetry, Tracking and Command, 2014, 35(2): 48-52
[6] Specifications of the camera link interface standard for digital cameras and frame grabbers: V2.0[G/OL], 2012. [2016-05-24]. http://www.docin.com/p-819308579.html
[7] Sawyer N. Source-synchronous serialization and deserialization[R]. Xilinx Corporation: Application Note XAPP1064 (v1.1), 2010
[8] T13/1410 Dr2a. American national standard for information technology atattachment with packet interface-6(ATA/ATAPI-6)[S], 2002
[9] 周荣政. 数码相机处理器设计及系统集成研究[D]. 上海: 复旦大学, 2004: 48-53
[10] 陈参宁, 邓华秋, 王健华. 基于光圈控制的自动曝光算法研究[J]. 传感器与微系统, 2011, 30(11): 46-48
Chen Canning, Deng Huaqiu, Wang Jianhua. Research on auto-exposure algorithm based on iris control[J]. Transducer and Microsystem Technologies, 2011, 30(11): 46-48
(编辑:冯 妍)
Application of high-speed image acquisition technology in rocket sledge head cover separation experiment
Sun Haibo, Wang Xiaobin, Wu Ruibin, Xiao Jian
(Beijing Institute of Structure and Environment Engineering, Beijing 100076, China)
High-speed images near separation are required in the rocket sledge head cover separation experiment. Due to the short time of explosion, the harsh environment of vibration and shock, common cameras cannot work properly. A small and low power high-speed image acquisition system is proposed, which is applicable in the vibration and shock environment. This system consists of a Camera Link interfaced camera, an image acquisition coding unit, and a data storage unit. The image acquisition and coding unit acquires images from the Camera Link interfaced camera and codes the image, and transmits the image to the data storage unit by the LVDS interface. A SATA interface solid-state hard disk is used in the data storage unit. By vibration absorption design and automatic light compensation, the system can work properly in a high shock environment, and can adapt to any light environment. The high-speed image acquisition system has been applied successfully in the rocket sledge head cover separation experiment. The resolution of 800×600, with 120 frame/s mono chrome camera is achieved. The saving time is no less than 30 minutes, and the image data is integral and reliable.
high-speed video; image acquisition; image storage; Camera Link interface
TN919
A
1673-1379(2016)03-0327-06
10.3969/j.issn.1673-1379.2016.03.017
孙海波(1987—),男,硕士学位,主要研究方向为计算机测量与控制。E-mail: haibo2806@163.com。
2015-10-12;
2016-05-24
http://www.bisee.ac.cn E-mail: htqhjgc@126.com Tel: (010)68116407, 68116408, 68116544
猜你喜欢
小学生学习指导(中年级)(2021年12期)2021-12-30
中学生数理化(高中版.高考理化)(2021年5期)2021-07-16
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
家庭影院技术(2020年7期)2020-08-24
汉字汉语研究(2020年2期)2020-08-13
作文小学中年级(2020年6期)2020-07-24
家庭影院技术(2020年1期)2020-06-24
电子制作(2019年22期)2020-01-14
网络安全和信息化(2019年7期)2019-07-10
疯狂英语·新读写(2018年3期)2018-11-29