基于无人机搭载数码相机的小麦育种表型信息解析
2016-09-10 01:53:20陆国政李长春杨贵军于海洋赵晓庆
中国种业 2016年8期
陆国政 李长春 杨贵军 于海洋 赵晓庆
(1河南理工大学测绘与国土信息工程学院,焦作454000;2国家农业信息化工程技术研究中心,北京100097)
基于无人机搭载数码相机的小麦育种表型信息解析
陆国政1,2李长春1杨贵军2于海洋2赵晓庆2
(1河南理工大学测绘与国土信息工程学院,焦作454000;2国家农业信息化工程技术研究中心,北京100097)
以江苏里下河地区农业科学研究所小麦育种基地为研究区域,利用八旋翼无人机搭载高清数码相机监测小麦育种小区,并开展了针对小麦育种表现形态的信息解析。通过无人机遥感试验,获取了覆盖小麦育种基地的高清数码影像,基于高清数码正射影像可以进行株高提取和叶色分类。可以快速获取小麦的株高、叶色差异和病虫害的程度等育种关键表型参量,最终方便有效的辅助小麦育种。
无人机;遥感;高清数码相机;育种;小麦
小麦品种繁多,品种间的地区性差异也比较明显。在小麦育种工作中,往往需要大量的数据,传统方法收集数据缓慢,不可能短时间内周期性的获取育种信息[1]。遥感技术具有宏观、客观、重复、廉价等优势,同时能做常规方法做不到的事[2]。近年来,无人机遥感相比卫星遥感和航空遥感具有机动灵活、成本低、操作简便、快速有效按需获取数据、空间分辨率高、受天气影响小等优点,因此无人机遥感这一技术手段在农业遥感监测中起到了重要作用[3]。
目前,在无人机遥感农情监测领域中,国内外许多学者进行了研究与探索。董梅等[4]应用无人机遥感影像提取烟草种植面积及其分布信息。高林等[5]利用无人机搭载多光谱相机对大豆的叶面积指数进行了监测。杨贵军等[6]研发了一套农业多载荷无人机遥感辅助小麦育种信息获取系统。总体来看,无人机遥感技术已经成为农情监测的又一个重要手段,而利用无人机搭载传感器对株高、叶色等农学性状进行解析的还鲜有报道。
针对小麦育种中的关键农学参数获取与解析的需求,本文利用多旋翼无人机搭载高清数码相机获取高清数码影像数据,通过自主研发的AgriHawk无人机影像数据处理软件实现数据处理与解析,获取农情信息,为辅助小麦育种提供一种快速有效的手段。
1 材料与方法
1.1研究区概况试验区位于江苏省扬州市里下河地区农业科学研究所小麦育种基地,该区属淮河流域湿地区,西起里运河,东至串场河,北自古淮河,南抵通扬运河,大约在32~33.5°N,119~120°E之间,亚热带温润季风气候,农作物主要以小麦和水稻为主。
1.2数据收集在试验基地选取育种小麦品鉴和品比种植区作为试验区,试验利用八旋翼电动无人机(无人机净重约6kg,飞行时间20min,飞行高度50m),同步搭载高清数码相机(表1)对研究区进行3次连续飞行监测,依次为拔节期(3月17日)、抽穗期/开花期(4月12日)和灌浆期(5月8日),获取到小麦3个关键生育期的遥感数据,包括研究区高清数码影像。
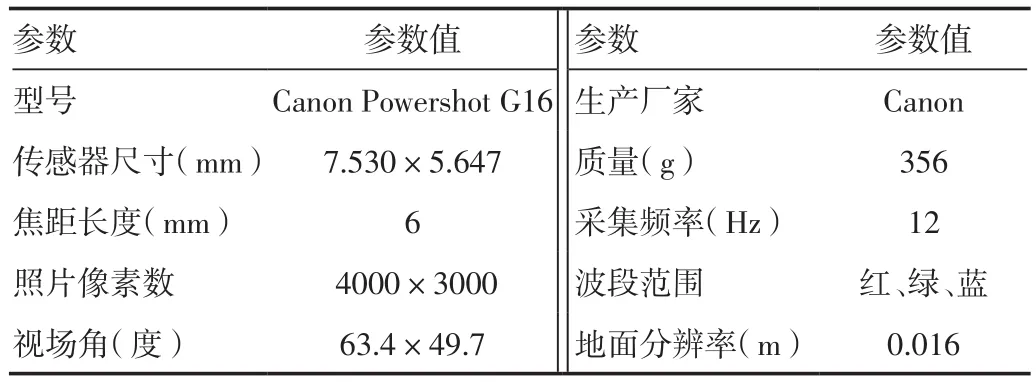
表1 高清数码相机的主要参数
1.3分析方法本文采用监督分类-最大似然法对冬小麦叶色进行提取和分类,叶色分为深绿、绿和浅绿3个等级。根据高清数码正射影像,通过目视解译判别出小麦叶色差异和小麦白粉病程度。
根据高清数码影像及影像拍摄时刻的POS信息(无人机飞行经纬度、高度、翻转、俯仰及旋转角度),采用测绘学自由网平差方法,经高精度空三加密解算得到育种田块的DSM分布图。通过精确DSM图,可提取得到育种小区离散地面高程值,采用克里金差值法得到育种基地地形趋势。最后利用育种基地DSM与育种基地地形趋势图相减,并利用少量实测株高进行标定后得到小区高分辨率株高。
2 结果与分析
2.1基于高清正射影像的小区自动分割采用自主研发的AgriHawk无人机影像数据处理软件,精确拼接生成一景高清数正射影像,育种基地小麦试验田正射影像如图1所示;在高清数码正射影像中可以清晰查看小麦叶色差异、成熟度差异及小麦病虫害的情况。

图1 育种小区正射影像(基地东侧)
小麦试验田正射影像共覆盖8块育种试验田(西1至西8试验区)。利用高空间分辨率正射影像对小麦试验田由西向东依次编号,共提取出966个育种小区,小区分布如图2所示。所有小区根据对应育种编号统一分配ID号,红色区域为地面取样点。

图2 育种小区空间分布图
2.2基于高清数码正射影像的育种区冬小麦叶色分类
基于育种基地小麦试验田正射影像,采用监督分类-最大似然法对冬小麦叶色进行提取和分类。叶色分为深绿、绿和浅绿3个等级(图3)。分类结果显示:从基地整体来看,深绿色类别以西4区和西6区居多,主要是由于块地土壤肥力好,小麦具有较好的长势,并且西6区属于早播,小麦生长健壮。靠近育种试验田保护行为数居多。浅绿色类别多数分布在西5区、西7区和西8区,这主要是由于晚播引起的,分类结果与实际情况相符。同时通过小麦育种试验田的正射影像,可以清楚的辨别出同一块地不同品种间叶色的差异。最终,通过目视解译的方法,随机抽取20个小区的叶色与实地考察的这20个小区的叶色基本上一致,分类精度达到80%以上。因此,通过监督分类-最大似然法对冬小麦叶色进行提取和分类,这一分类方法是可行的。2.3基于育种小区DSM的小麦株高估算根据高清数码影像及影像拍摄时刻的POS信息(无人机飞行经纬度、高度、翻转、俯仰及旋转角度),采用测绘学自由网平差方法,经高精度空三加密解算得到育种田块的DSM分布图(图4)。
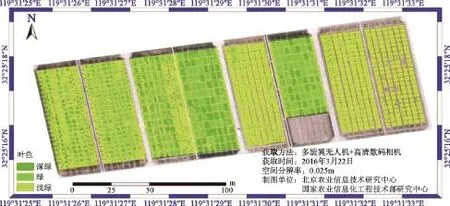
图3 育种小区冬小麦叶色分类

图4 小麦育种小区DSM平面图
由图4所示精确DSM图,可提取得到每个育种小区离散地面高程值,采用克里金差值法得到育种基地地形趋势,如图5所示,育种基地地面海拔高度呈由东向西逐步增高的态势。

图5 小麦育种小区地面趋势图
利用育种基地DSM与育种基地地形趋势图相减,并利用少量实测株高进行标定后得到小区高分辨率株高(图6)。
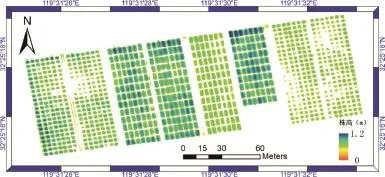
图6 小麦育种小区高分辨率株高
在地面测量上,随机选择63个小区,通过实测63个小区的株高与上述方法预测的株高进行精度验证(图7)。从图7中可以看出,预测株高和实测株高基本上在一条直线上,株高验证精度R2达到了0.72,基本上可以用我们预测的株高来代替实测的株高。
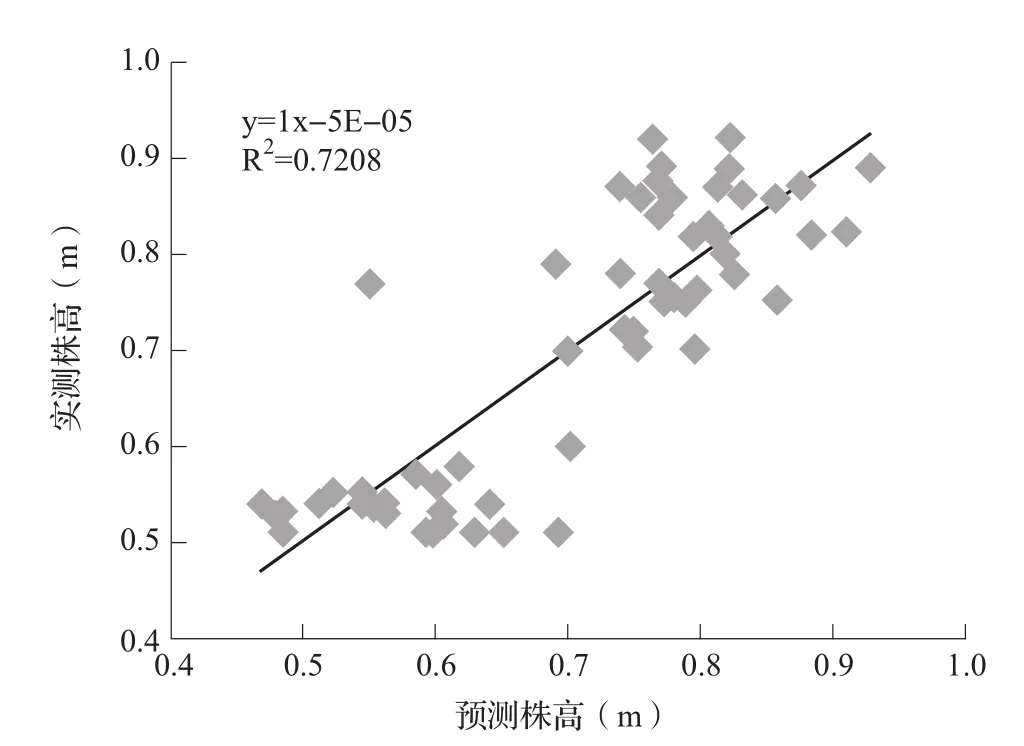
图7 小麦育种小区实测与预测株高的对比分析
3 讨论与结论
无人机遥感相比卫星遥感和航空遥感具有机动灵活、成本低、操作简便、按需获取数据且空间分辨率高、快速有效获取所需数据、受天气影响小等优点,因此无人机遥感这一技术手段在农业遥感监测中起了重要作用。在江苏里下河地区农业科学研究所小麦育种基地无人机遥感试验结果表明,采用自主研发的AgriHawk无人机影像数据处理软件,将八旋翼无人机航拍的高清数码照片精确拼接生成一景高清数正射影像,在高清数码正射影像中可以清晰查看小麦叶色差异、成熟度差异及小麦病虫害的情况;基于育种基地小麦试验田正射影像,采用监督分类-最大似然法对冬小麦叶色进行提取和分类。叶色分为深绿、绿和浅绿3个等级。经目视解译,分类精度达到80%以上,证明此分类方法是可行的;根据高清数码影像及影像拍摄时刻的POS信息(无人机飞行经纬度、高度、翻转、俯仰及旋转角度),采用测绘学自由网平差方法,经高精度空三加密解算得到育种田块的DSM分布图进行株高提取,将预测株高与实测株高进行对比分析,株高验证精度R2达到了0.72,基本上可以用我们预测的株高来代替实测的株高。
本文研究表明,利用无人机搭载高清数码相机能快速有效的获取小麦育种的一些表型信息,为辅助作物育种提供了技术支持。然而,本文中只利用无人机搭载单一传感器进行小麦育种表型信息获取,最终获取到的表型信息很少。通过无人机搭载多个传感器能够全方位的快速有效的获取作物育种表型信息。针对无人机搭载的多个传感器、信息的解析等工作还需进一步研究。
[1]陈晨.基于多旋翼无人机的大豆育种遥感监测应用研究.黑龙江科技信息,2016(5):140-141
[2]陆登槐.农业遥感的应用效益及在我国的发展战略.农业工程学报,1998(3):64-70
[3]刘刚,许宏健,马海涛,等.无人机航测系统在应急服务保障中的应用与前景.测绘与空间地理信息,2011,34(4):177-179
[4]董梅,苏建东,刘广玉,等.面向对象的无人机遥感影像烟草种植面提取和监测.测绘科学,2014,39(9):87-90
[5]高林,杨贵军,王宝山,等.基于无人机遥感影像的大豆叶面积指数反演研究.中国生态农业学报,2015(07):868-876
[6]杨贵军,李长春,于海洋,等.农用无人机多传感器遥感辅助小麦育种信息获取.农业工程学报,2015(21):184-190
河南省基础与前沿研究项目(152300410098);国家地理测绘信息局公益项目(201412020)
杨贵军
2016-05-21)
猜你喜欢
语文世界(小学版)(2021年5期)2021-06-04 16:30:11
山东林业科技(2019年2期)2019-06-03 10:10:58
华东师范大学学报(自然科学版)(2018年3期)2018-05-14 10:27:18
天然产物研究与开发(2018年4期)2018-05-07 06:47:55
山东农业科学(2018年3期)2018-03-29 10:27:08
中国医院院长(2017年9期)2017-06-15 12:59:24
知识经济·中国直销(2016年7期)2016-11-07 09:36:18
公民与法治(2016年6期)2016-05-17 04:10:35
遥感信息(2015年3期)2015-12-13 07:26:50
电测与仪表(2015年22期)2015-04-09 11:42:14