
航母多机出动甲板作业流程研究*
2016-09-09 09:21杨炳恒毕玉泉吴国庆
舰船电子工程 2016年8期
杨炳恒 毕玉泉 张 彪 吴国庆
(海军航空工程学院青岛校区 青岛 266041)
YANG Bingheng BI Yuquan ZHANG Biao WU Guoqing
(Qingdao Branch, Naval Aeronautical and Astronautical University, Qingdao 266041)
航母多机出动甲板作业流程研究*
杨炳恒毕玉泉张彪吴国庆
(海军航空工程学院青岛校区青岛266041)
航母飞行甲板环境差、空间狭窄、保障设施特殊等特点决定了航母多机出动需要合理的甲板作业规划,否则会造成甲板作业环境拥塞、无序混乱。论文以俄航母舰载机一个批次四架飞机出动为研究原型,创建了多机出动甲板作业流程图,通过对流程图分析,给出了计算整个任务作业总时间、关键作业活动过程及各个甲板子作业活动最晚开始时间和最早开始时间的方法,可为航母多机出动甲板保障方案的制订提供决策支持。
舰载机; 多机出动; 甲板作业; 作业流程图; 航空母舰
YANG BinghengBI YuquanZHANG BiaoWU Guoqing
(Qingdao Branch, Naval Aeronautical and Astronautical University, Qingdao266041)
Class NumberU674.771
1 引言
航空母舰至今仍是世界各军事强国海军最重要的主战装备之一,其绝大多数作战使命都需要并且只能由舰载机来承担和完成。在实际作战及训练任务中,舰载机多以多机编队的形式出动,以形成最大的战斗力。与岸基战斗机保障作业环境相比,航母舰载机飞行甲板作业环境有着环境差、空间狭窄、保障设施特殊等特点。舰载机的起飞、降落、停泊、维护等很多工作都要在飞行甲板上完成,在这样的复杂环境下,指挥人员需要在舰载机多机出动时精准地制定各种保障作业计划,如加油、供气、挂弹及引导等作业的时间、地点和资源调度安排;因此,舰载机多机出动时甲板作业流程直接影响着舰载机出动效率和大型舰船作战能力[1~4]。
外军航母发展较早,对于航母舰载机甲板作业路程有着比较成熟的经验,以俄罗斯“库兹涅佐夫”号航母舰载机起飞时的甲板作业为例,为了顺利地完成多架航母舰载机的起飞作业调度,航母配备了专门的指挥系统来规划设计舰载机的甲板作业流程,甲板作业流程的规划要考虑环境、设施、人员及作业时间等。航母舰载机多机出动时,出动的飞机严格按照预先制订的甲板作业流程进行机务及勤务的保障直至最后的起飞,每架飞机的甲板作业要严格按照预先规定的时间完成,否则会影响下一架飞机的正常起飞,因此,多机出动时的舰载机甲板作业流程的制订和执行需要经过充分的分析和优化,这样才能最大效率地提高航母多机出动安全和效率[5]。下面以俄罗斯“库兹涅佐夫”号航母舰载机一个批次四架飞机出动为例,对航母多机出动甲板作业流程进行研究与分析。
2 多机出动甲板作业流程
2.1单机甲板作业流程
实际工作中,舰载机甲板作业主要是由航空保障部门舰员和航空联队的机务人员协同飞行员完成的,每架执行任务的舰载机在甲板都要完成舰载机调运、通风除潮、充氧、加油、充氮、弹药保障、通电检查、惯导对准、按路线检查飞机、滑行至起飞位、偏流板保障、止动装置保障以及舰载机起飞等作业。由于飞机甲板保障资源及设施的限制,舰载机一般需要在多个站位完成以上的甲板作业。利用拓扑学原理,以点表示具体的工作起止节点,以线表示工作过程,单机甲板作业可以用下面的有向图1表示。
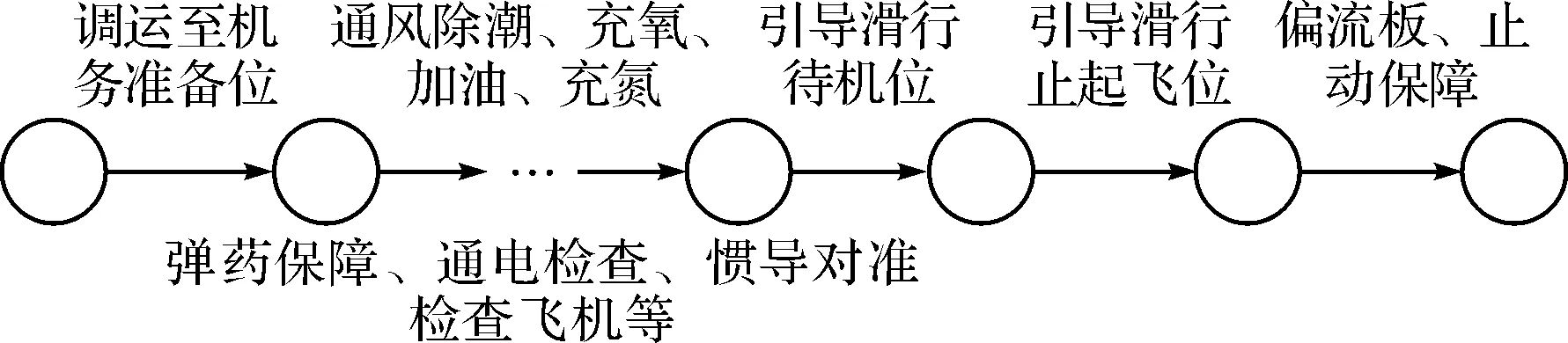
图1 单机甲板作业流程图
2.2多机甲板作业流程
多机出动时,由于舰载机起始停机位以及使用的甲板机务保障站位的不同,每架舰载机的单机甲板作业流程虽然有差异,但基本作业流程结构都与图1类似,考虑以俄罗斯“库兹涅佐夫”号航母舰载机一个批次四架飞机出动为实例,不考虑其他因素,四架舰载机的甲板作业流程可用图2来表示。
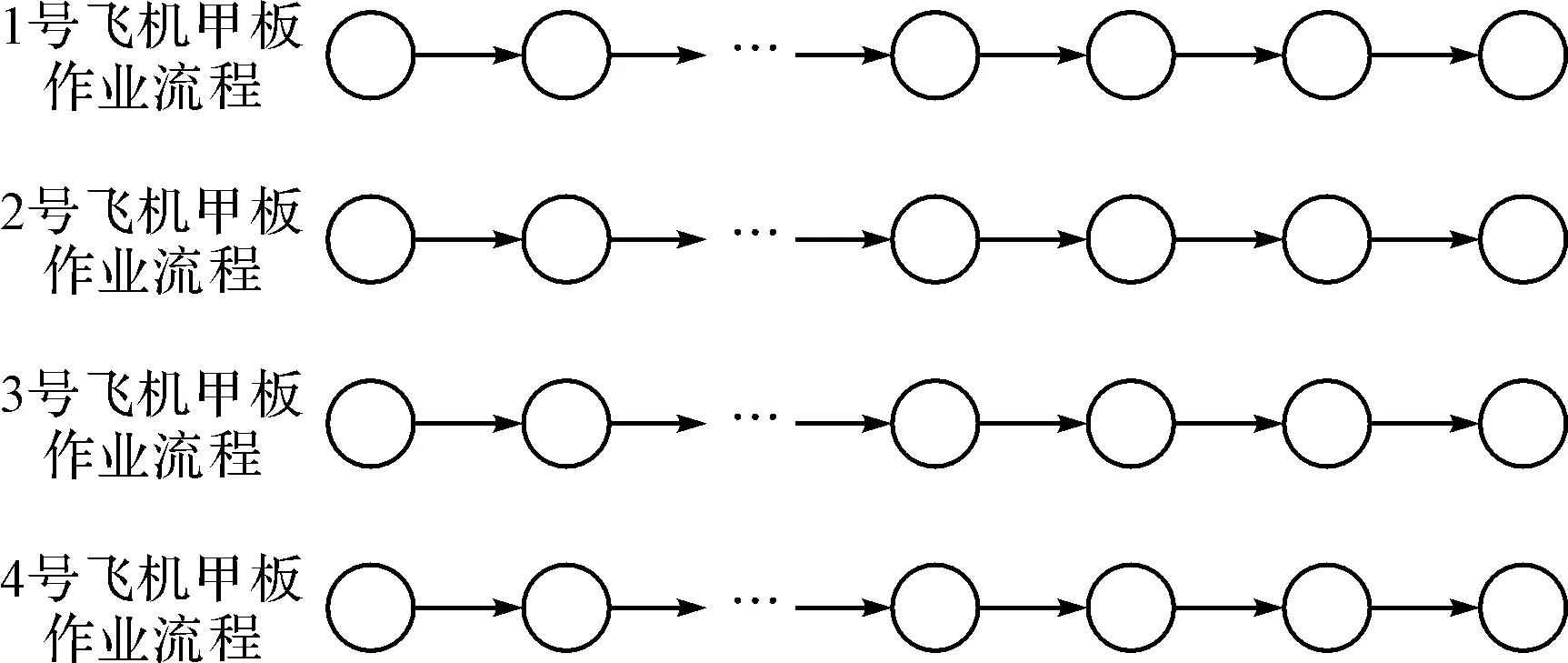
图2 多机甲板作业流程图
在实际的多机出动甲板作业实施中,由于甲板保障设施及保障人员的限制,舰载机只有部分的甲板作业可协调同步进行,如在舰载机机务保障位的氧气、氮气、弹药等保障作业;大部分的甲板作业只能串行的进行,如“引导滑行至待机位”作业,一般情况下,甲板保障设施及人员同一时间只能保障一架飞机实施该作业。因此,用并行的拓扑路径表示可并行的作业,用串行的路径表示只能串行完成的作业,多机出动时实际的甲板作业流程图可用图3表示。
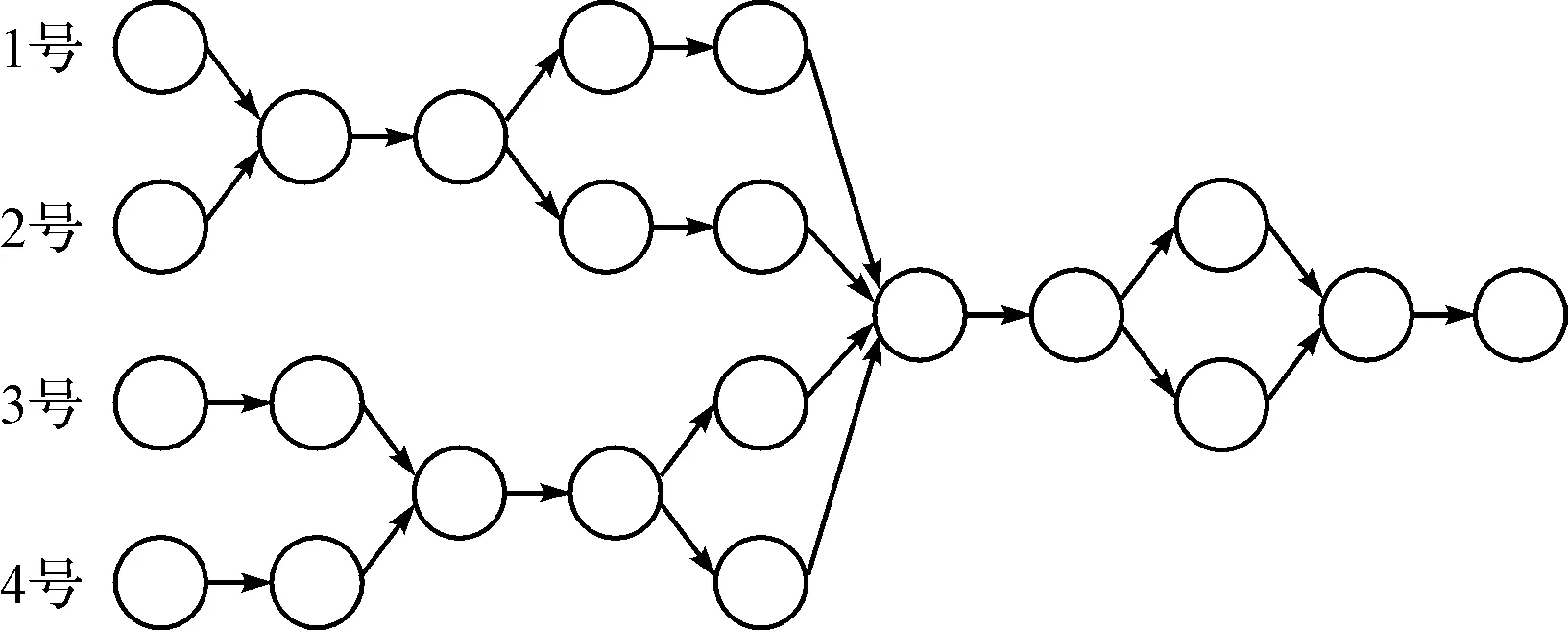
图3 实际的多机甲板作业流程图
3 多机出动甲板作业流程分析
3.1多机出动甲板作业流程网
为了便于研究,对图3的多机甲板作业流程图进行改造,为流程图中的每个工作起止节点进行编号,同时根据每项作业的时间为每条路径进行加权,得到如图4所示的加权多机甲板作业流程图,称之为多机出动甲板作业流程网[6~8]。
图4中的节点Ti表示舰载机相邻两项作业的结束及开始的时间界面,如图中T2节点可表示“1号舰载机加油完毕”以及“1号舰载机开始弹药保障”,此时,a1表示1号舰载机加油所需要的时间。
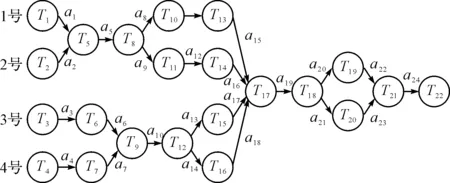
图4 多机甲板作业流程图网
注意:图4中的ai表示的作业时间,不是实际的作业时间,而是在作舰载机保障计划时根据经验数据和保障需求规划的时间,即计划时间[9~10]。
3.2多机出动甲板作业流程研究
从图4的多机甲板作业流程图网中可以得出,有向边的权ai表示该有向边代表的作业活动需要的完成时间,这样多机出动时1号舰载机甲板作业的总时间T(1#)可用时间序列a1a5a8a11a15a19a20a22a24,作业过程A(1#)可用节电序列T1T5T8T10T13T17T18T19T21T22;同样的可以得到2、3、4号舰载机甲板作业的总时间T(2#)、T(3#)、T(4#)和作业过程A(2#)、A(3#)、A(4#)。分析多机甲板作业流程图网可以直接得出:
1) 整个多机出动的作业任务完成需要的总时间Ti总为T(1#)、T(2#)、T(3#)、T(4#)中最大的时间;
2) 决定多机出动总时间的作业过程A(i#)为整个多机出动任务的关键作业过程;
3) 减少关键作业过程的作业时间可在一定范围内提高整个作业任务完成需要的总时间。
作业流程交通网中串行的单一路径为关键作业,关键作业所耗费时间变化直接影响着整个舰载机作业的完成时间,提高关键作业完成效率可直接对舰载机作业流程进行时间优化。
定义在舰载机甲板作业任务实施中,作业活动在最晚的时刻内开始也不影响舰载机整个流程的总完成时间的时刻称之为最晚开始时间Ti晚,作业活动满足开始时间可以开始实施的最早开始时间为Ti早,从图中分析可以得出,作业活动Ti的最早开始时间为前项任务作业过程完成的最后时间;作业活动Ti的最晚开始时间为总的任务时间减去后续作业所需的总时间。
为简化公式表达,抽取图4中的部分流程子网进行研究分析(见图5),研究分析的结果可直接映射到整个的作业流程图网中。
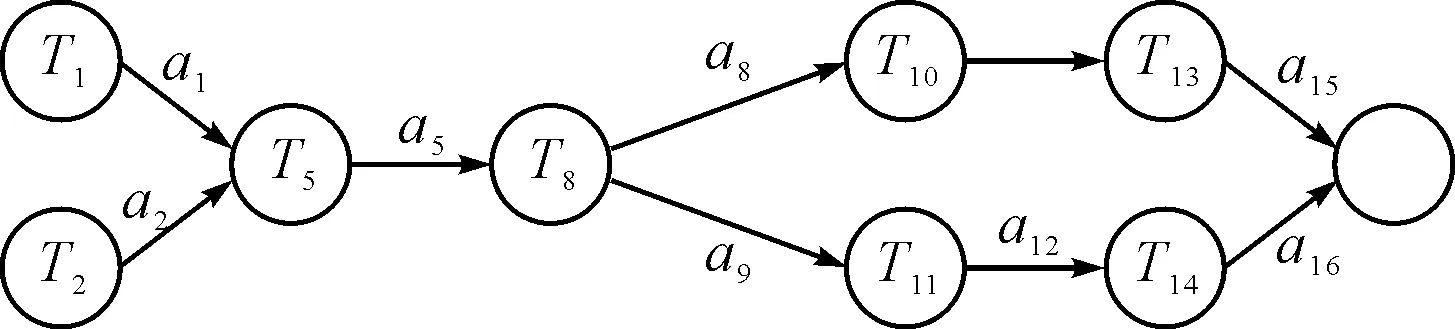
图5 多机甲板作业流程图子网
在图5中不考虑其他特殊的因素,作业活动T1的最早开始时间为T1早0,最晚开始时间为T1晚=T8总-a5-a1。如作业过程序列T1T5T8为任务阶段A8的关键作业过程,则T1晚=0。
作业活动T5的最早开始时间为T5早为a1和a2的最小值,即T5早=Min(a1,a2);作业活动T5的最晚开始时间为后续作业活动T5晚=T8晚-a5。
利用同样的分析计算方法我们可以得到:
活动T2最早开始时间及最晚结束时间:T2晚=0;T2晚=T8总-a5-a1。
活动T8最早开始时间及最晚结束时间:T8早=T5早+a5;T8晚=T17总-Min(a8+a11+a15,a9+a12+a16)。
活动T10最早开始时间及最晚结束时间:T10早=T8早+a8;T10晚=T17总-Min(a11+a15,a12+a16)。
活动T11最早开始时间及最晚结束时间:T11早=T8早+a9;T11晚=T17总-Min(a11+a15,a12+a16)。
活动T13最早开始时间及最晚结束时间:T13早=T10早+a11;T13晚=T17总-Min(a15,a16)。
活动T14最早开始时间及最晚结束时间:T14早=T11早+a11;T14晚=T17总-Min(a15,a16)。
活动T17最早开始时间:T17早= Min(a1+a5+a8+a11+a15,a2+a5+a9+a12+a16)。
在求得了各个甲板作业活动的Ti早、Ti晚后,可以在多机出动甲板作业流程规划时,根据舰载机状态、人员配置及保障设施的情况合理地协调各个保障小组及人员的作业时序,编制最为合理的多机出动甲板作业流程,使人员和装备得到最大的利用效率,保障整个多机出动任务的快速顺利安全实施。
4 结语
通过对俄罗斯“库兹涅佐夫”号航母舰载机一个批次四架飞机出动的甲板作业的流程模型建立及分析,给出了计算整个任务作业总时间、关键作业活动过程以及各个甲板子作业活动最晚开始时间和最早开始时间的方法。
在航母舰载机多机出动任务中,可以利用本文提出的方法对甲板作业进行分析研究,从而对航母多机出动甲板作业流程进行合理规划,以保障舰载机甲板作业的安全、快速有序的实施,为编制舰载机甲板保障方案提供决策支持。
[1] 张勇,周益.美国舰载航空甲板运动准则[J] .中国舰船研究,2012,7(1):30-42.
[2] 陈传铮.航母的飞行甲板[J].航母经纬,2005(5):39-41.
[3] 陈练.美国海军提高舰载机出动架次率的新招数[J].现代舰船,2008(10):24-26.
[4] 史文强,李彦庆,陈练.航空母舰飞行甲板作业及弹药转运系统分析[J].中国舰船研究,2012,7(3):9-14.
[5] 赵登平,李彦庆,陈练.航空母舰研制面面观[M].北京:海潮出版社,2012:197-199.
[6] 杨炳恒,毕玉泉,徐伟勤.一种舰载机调运作业流程优化模型[J].舰船科学技术,2011,33(1):118-121.
[7] 杨炳恒,王海东,韩峰,等.舰载机调运作业流程优化研究[J].科学技术与工程,2010,22(10):5602-5605.
[8] Maegegor M H,Grover WD.OPtimized k-shortest Paths algorithm for faeitity restoration[J].Software Praetice and ExPerienee,1994,24(9):823-828.
[9] EPPstein D. Finding the k shortest Paths[J]. SIAM Joumal on ComPuting,1999,28(2): 652-673.
[10] Gliu, K G Ramakrishnan. A*Prune:An algorithm for finding k shortest Paths subject to multiple constraints[C]//Proceedings of the INFo-COM 2001 Confereee, IEEE, Anehorage, Alaska,2001:743-74.
Deck Workflow of Carrier Multi-aircraft Sortie*
The poor environment, confined space, and special support equipment of aircraft carrier flight deck determine that deck workflow of carrier multi-aircraft sortie needs to be designed properly, otherwise it will make deck work environment congested and out-of-order. In this paper, a batch of four aircrafts’ sortie of Russian carrier is researched as model, and deck workflow chart of multi-aircraft sortie is presented. Through the analysis of flow chart, the calculating methods for operation all time, the first and last time of key operation and all deck sub-operation are proposed, which can provide decision support on deck support plan of carrier multi-aircraft sortie.
aircraft, multi-aircraft sortie, deck operation, work flow chat, aircraft carrier
2016年2月4日,
2016年3月11日
杨炳恒,男,硕士,副教授,研究方向:舰面保障、装备保障信息化等。毕玉泉,男,硕士,副教授,研究方向:舰面保障。张彪,男,硕士,讲师,研究方向:计算机应用。吴国庆,男,硕士,讲师,研究方向:监视技术。
U674.771
10.3969/j.issn.1672-9730.2016.08.037
猜你喜欢
小哥白尼(军事科学)(2022年7期)2022-09-20
百科探秘·航空航天(2022年6期)2022-06-28
舰船科学技术(2022年10期)2022-06-17
船舶标准化工程师(2020年1期)2020-06-12
船舶标准化工程师(2020年1期)2020-06-12
计算机与数字工程(2019年4期)2019-05-07
学与玩(2018年5期)2019-01-21
国防(2017年12期)2017-04-09
