
基于里程计和超声测距的图像扫描定位方法研究
2016-09-08 07:12韩海韦
公路交通技术 2016年4期
林 东,赵 妍,刘 恒,韩海韦
(1.西安公路研究院,西安 710075;2.长安大学,西安 710054)
基于里程计和超声测距的图像扫描定位方法研究
林东1,赵妍1,刘恒2,韩海韦1
(1.西安公路研究院,西安710075;2.长安大学,西安710054)
针对公路桥梁外观病害的定位问题,基于霍尔里程计和超声测距仪提出一种桥梁外观图像横向和纵向摄像机扫描定位方法,并将其应用于智能化桥检车,可推算出图像相对于桥梁起始位置的精确坐标,实现对桥梁的纵向和横向的扫描定位。
桥检车;定位方法;超声测距;里程计
随着交通行业的快速发展,公路桥梁建设数量也迅速增多。而在长期运营过程中,桥梁会出现各种病害,主要包括分层、开裂、冻融损坏、钢筋生锈或腐蚀等,这些病害的最终外在表现为桥梁裂缝[1]。因此,通过有效监测桥梁表面裂缝及损伤,便能够快速监管和确保公路桥梁运营的安全性。目前,桥梁表面裂缝检测方法主要是图像采集与智能识别,其检测过程是通过摄像机扫描桥梁外观,并对桥梁病害进行自动图像智能识别。智能化桥检车是完成图像采集与智能识别的重要手段,其图像采集与智能识别功能由高性能工控计算机、高清摄像机、专业镜头、高速视频采集卡、摄像机定位模块等设备结合图像智能分析算法共同完成。图像分析处理的结果数据包括桥梁病害特征、病害程度评价和病害位置,该数据是桥梁维护与保养的关键数据参数。通过智能化桥检车摄像机定位模块可快速、便捷地定位桥梁外观病害,并准确定位病害位置[2],便于修复桥梁病害。因此,摄像机定位是智能化桥检车完成图像采集与智能识别的关键。
1 图像定位方法选择
图像定位是摄像机在扫描过程中对其所处位置的判断,并将摄像机相对于桥梁横向与纵向的位置换算成桥梁病害所在的位置。常用定位系统包括GPS定位、雷达定位、移动基站定位等。
1)GPS定位[3]。
GPS定位是利用GPS卫星和用户接收机天线之间的距离(或距离差),根据已知卫星瞬时坐标来确定用户接收机所对应点位的三维坐标(X,Y,Z),结果表现为经度、纬度和高度。利用GPS定位仅能确定一个方向的位置X(桥梁纵向),而Y(桥梁横向)无法获得。
2)雷达定位[4]。
雷达无源定位是指利用侦察设备接收雷达辐射信号,并经过处理来确定它的空间或地理位置的定位技术。通常采用二维平面测向定位方法进行目标定位,二维平面测向定位方法是在已知的2个或多个不同位置布设雷达接收设备,测量雷达辐射电磁波的方向时差数据,通过三角测量法交会计算雷达位置。雷达定位通常应用于军事领域、资源探测、环境监测等行业,但其成本相对较高。
3)移动基站定位[5]。
与GPS定位类似,利用GSM信号源与多个基站之间的通信来实现对GSM信号源的定位。其定位精度较差,误差约为150 m,且在公路桥梁现场,通常少有多个基站同时覆盖的情况,因此该方法不适用。
综上所述,上述常用定位方法都存在一定不足。若采用智能化桥检车,则由于公路桥梁的起始和终止桩号已知,仅需确定桥梁横向和纵向的相对位置即可。本文所提出的桥检车摄像机定位方法结合使用了里程计和超声测距装置,可分别完成桥梁纵向和横向位置的精确定位。
2 定位扫描方法及结构
智能化桥检车图像扫描采用单摄像机扫描模式,通过里程计记录桥检车自身移动的位移量以实现桥梁纵向扫描(X方向),同时利用超声测距模式记录摄像机滑动位移以实现垂直桥梁方向扫描(Y方向)。桥检车的X方向行驶与摄像机的Y方向运动时所形成的扫描过程如图1所示。

图1 桥检车行驶时摄像机运动扫描过程示意
2.1桥梁纵向(X方向)
X坐标定位采用霍尔传感器。霍尔传感器在应用于汽车时常常用于测量速度、里程等。桥检车摄像机定位模块利用霍尔传感器计数,从而可以换算出里程值[6]。
霍尔里程计的安装方式是:在车轮上固定一个圆盘,圆盘上按极性交替方式安装2圈磁铁,分别固定2个传感器,其位置刚好分别对准2圈磁铁,如图2所示。车轮转动时,2个传感器的磁场交替变化,且相位相差90度,即传感器交替输出相位相差90度的方波。车辆前进时,外圈比内圈相位超前90度;车辆倒退时,内圈比外圈超前90度,如图3所示。

图2 磁盘与传感器固定示意

图3 车辆移动时传感器输出
利用上述车辆前进、后退时传感器的输出波形,控制器可以进行可逆计数,然后通过RS232总线把数据送给计算机,计算机根据车轮直径和圆盘磁铁数量计算车辆行驶里程S。里程计算公式为:

式中:N为当前计数值;D为车轮直径;M为每圈磁铁数量。
2.2桥梁横向(Y方向)
Y方向定位采用无接触测量式超声波测距法测量相机与滑竿一端的距离并将其作为运动中摄像机的Y坐标。其测距量程上能达到100 m,精度能达到厘米数量级,完全满足桥梁横向定位要求。摄像机定位模块通过测量超声波的发射与接收时间差来计算摄像机到滑竿一端的距离,该测量方式检测目标物体的反射波信号[7-9],称为反射式超声波测量方法。测距示意如图4所示。

图4 反射式超声测距
测距公式为:

式中:L为被测距离的长度;c为超声波在空气中的传播速度;T为超声波从发射到接收的时间差。
实际上,超声波传输路径上都存在障碍物,且障碍物的反射波很有可能比目标物体的反射波更快到达接收器,从而导致接收器误把障碍物的距离当成目标物体的距离。含障碍物的反射式超声波测量示意如图5所示。

图5 含障碍物的反射式超声波测量示意
为了解决障碍物的干扰问题,采用对射式超声波测量方式来测量目标物体的距离,布局如图6所示。
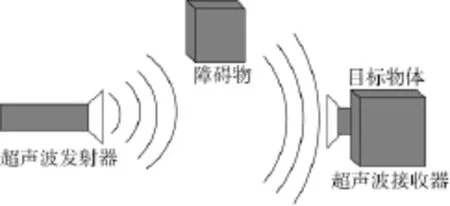
图6 对射式超声波测量示意
要测量超声波发射器到目标物体的距离,需把超声波接收器安装在目标物体上,由于超声波发射器和接收器安装在同一个水平线上,2点之间直线距离最短,因此即使发射器和目标物体之间有障碍物,也不会对超声波测量造成干扰。超声波对射式测距模块如图7所示。

图7 超声波对射式测距模块示意
发射传感器固定在一端,接收传感器固定在摄像机旁边,其随摄像机一起运动,可以实时测量摄像机的运动位置,即Y坐标。控制器通过RS232总线与计算机通信。
对射式超声测距公式为:

3 控制过程
3.1里程计控制过程
控制器与计算机通信协议定义如下。
计算机命令:“AF”启动命令;“5F”停止命令。
计算机向控制器发送“AF”命令,控制器便开始测量,并回传结果数据。若计算机发送“5F”命令,控制器便停止测量。
控制器回传数据格式为:

其中:FF是数据起始标志符;high是数据的高8位;low是数据的低8位。数据内容为公式(1)计算后的里程数值结果。
3.2超声测距控制过程
计算机与控制器之间的控制命令与里程控制器一致。
超声传感器通电3 ms后,超声传感器和控制器处于稳定状态,然后给传感器一个初始化信号,传感器就开始以49.4 kHz的频率发射16个脉冲串。同时,传感器内部产生一个2.38 ms的内部消隐信号,以防止该脉冲串产生超声信号回声,导致接收错误。因此,即使目标物体距离非常近,也至少要等2.38 ms后才会接收到回声。传感器发送时序如图8所示。

图8 超声传感器发射时序
常温下超声波传播平均速度c=344 m/s,因此由内部消隐信号产生的测量盲区距离为2.38 ms× 344 m/s≈0.8 m,摄像机横向定位不允许有如此大的测量盲区。为消除测量盲区,控制器需先初始化接收传感器3 ms。整个超声波测距时序如图9所示。

图9 超声传感器测距接收时序
4 测量误差计算与分析
4.1霍尔里程计
根据里程计算公式(1),相邻2个磁片之间的距离为最小测量单元,当要求误差小于0.1 m时,可推导出内外圈磁片数量计算公式:

4.2超声测距
根据超声波测距公式(3),可知超声波速度和测量时间均可能影响距离测量误差。
1)超声波传播速度。
超声波的传播速度与空气的密度密切相关,密度越高则传播速度越快。在现场环境下该参数无法人为干预,故该误差无法消除,属于系统固有误差。
2)测量时间误差。
当要求测距误差小于1 mm时,假定忽略传播误差。根据公式(3),测距误差△t=L/c= (0.001/344)≈0.000 002 907 s,即2.907 us。
因此,忽略系统固有误差,且时间值测量精度达到微秒级,就能保证智能化桥检车摄像机Y方向定位测距误差小于1 mm。
5 结束语
本文基于霍尔里程计和超声测距仪提出了智能化检车摄像机定位扫描方法,介绍了该方法的硬件组成、测量控制逻辑与处理过程,并分析了定位模块的测量误差。利用该方法,可实现对桥梁纵向和横向的扫描定位,定位结果可为实现摄像机多次扫描成像的图像融合与分析提供位移坐标数据,并可准确确定图像与桥梁起始的相对位置,便于及时根据桥梁病害位置对桥梁进行修复。
[1]吴轩.智能桥梁检测车工作臂定位于避障控制的研究[D].长沙:湖南大学,2011.
[2]李淑慧.智能化桥检车图像采集分析系统设计与研究[J].现代电子技术,2010(3):154-156,160.
[3]关桂霞,朱虹,关永,等.GPS定位误差分析与状态估计[J].计算机工程,2008(34):236-238.
[4]何缓,杨春山,傅文斌.无源雷达定位精度分析[J].现代雷达,2007(29):1-3.
[5]郭英龙,赛景波,乐丽琴,等.移动通信基站定位系统[J].微型机与应用,2010(5):42-45.
[6]蔡海永,钟若飞,曾凡阳,等.车载LiDAR中基于霍尔开关的里程计构建[J].测绘技术装备,2013(15):43-46.
[7]王峰,葛立峰.一种高精度超声测距系统的设计[J].计算机技术与发展,2008(1):229-231,236.
[8]杨庆,陈桂明,董振旗.一种改进的高精度超声测距方法研究[J].计算机技术与发展,2010(12):209-212.
[9] 王荣扬,钱振华,殷勇辉.基于FPGA的互相关无串扰超声测距系统[J].计算机工程,2013(8):308-313.
Study on Image Scan Positioning Method Based on Mileage and Ultrasonic Range Finder
LIN Dong1,ZHAO Yan1,LIU Heng2,HAN Haiwei1
Targeting at positioning of exterior defect of road bridges,This paper suggests a bridge image horizontal/vertical camera scan positioning method based on Holzer mileage meter and ultrasonic range finder,and we apply this method to intelligent bridge inspection vehicle,it can reckon precise coordination of image from the start/end position of bridge,so to realize horizontal/vertical scan positioning of bridge.
bridge inspection vehicle;positioning method;ultrasonic range finder;mileage meter
1009-6477(2016)04-0092-04
U442.4
A
10.13607/j.cnki.gljt.2016.04.021
国家自然科学基金(20120930,211000120307)
2016-02-25
林东(1984-),男,福建省建瓯市人,硕士,工程师。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
数字通信世界(2019年12期)2020-01-14
科学(2020年3期)2020-01-06
中国惯性技术学报(2019年1期)2019-05-21
电子制作(2017年7期)2017-06-05
中国公共安全(2017年11期)2017-02-06
办公自动化(2016年18期)2016-12-17
导航定位与授时(2016年6期)2016-03-16
新闻前哨(2015年2期)2015-03-11
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
