全向车测量轮导引方式的设计与仿真
2016-09-08 07:53:22朱艳杰宜亚丽景常海戴勇波
工程设计学报 2016年4期
朱艳杰, 宜亚丽, 景常海, 戴勇波
(1. 燕山大学 机械工程学院, 河北 秦皇岛 066004; 2. 北京星航机电装备有限公司, 北京 100074)
全向车测量轮导引方式的设计与仿真
朱艳杰1, 宜亚丽1, 景常海1, 戴勇波2
(1. 燕山大学 机械工程学院, 河北 秦皇岛 066004; 2. 北京星航机电装备有限公司, 北京 100074)
针对全向车位姿检测中由于麦克纳姆轮驱动打滑引起的整车运行精度测量误差大的问题,提出了测量轮自主导引方式,建立数学模型,并对AGV系统结构进行了阐述.设计方案中的整车六轮布局,采用四驱两从动,俩从动轮作为测量轮,运用差速原理获取自动导引全向车的路径信息,同时解决了现有单测量轮全向车原地回转状态下位姿无法精确检测的难题.提出浮动三自由度测量轮结构设计,实现实时接触地面,保证位姿检测的准确性,并对直线、曲线、原地自转三种典型运动状态下的位姿检测进行了ADAMS仿真,结果表明,此种导引方式可满足灵活设置路径下全向车位姿的精确检测,适用范围广.
全向车; 测量轮导引; 麦克纳姆轮; 运动学仿真
自动导引车(automatic guided vehicle,AGV)即全向车,是现代化生产及柔性制造系统中的关键设备,已广泛应用于仓储业、制造业、自动化物流等领域[1-3].它具有柔性好、运输效率高及作业可靠等优点,并在众多行业中替代人工,甚至完成人工很难完成的一些操作,从而减轻了工人的劳动强度,降低危险性[4-6].
导引方式是AGV的研究核心之一[7],也是实现AGV自动化、智能化的关键技术.基于导引传感器的不同,可将AGV的导引方式分为有线导引[8-10]和无线导引[11-13].郑炳坤等[14]提出了一种基于控制器局域网络(controller area network, CAN)总线、易于扩展的磁导航AGV控制系统,其路径设置较容易,但磁带易受污染和损伤,需定期更新与重涂.童峰等[15]设计出一种用于AGV的超声波导引系统,介绍了其工作原理及结构,并进行了各项导引功能的测试,该导引方式的优点是在特定环境下具有较好的柔性,缺点是需要较大的反射面,在生产车间内应用较为困难.陈顺平等[16]采用激光导引方式设计出AGV小车,其优点是定位准确,路径变更较容易,缺点是对作业环境中光线要求较高.Jung等[17]提出基于ANFIS的AGV视觉导引方式,通过不同角度获取周围环境的图像并整合成立体影像,进而确定AGV的位置和姿态(简称位姿)并导引,优点是路径设置灵活,适用范围广,但由于技术限制,该方法并未进入实用阶段.
为设计一种稳定性好、可靠性高、路径自由且适应性强的全向车产品,本文提出一种双测量轮导引方式.现有单测量轮方式,测量轮处于全向车平面几何中心,当全向车作原地回转运动时,测量轮转轴即整车回转中心,致使全向车原地回转状态下位姿无法精确检测.双测量轮不仅可以避免此现象,还改善了运行过程中单测量轮转轴波动的随机性.用编码器记录2个测量轮的旋转圈数和水平旋转角度,数据经中央控制器处理,获得AGV的位置和姿态,进而得出其位姿偏差,CPU发送信号给四轴运动控制器,由其实时调整整车的运动方式,使 AGV沿着预定的路线行驶.
1 测量轮导引方式的工作原理
1.1测量轮导引方式
如图1所示,在全向车中心线两侧对称安装2个测量轮,即六轮结构布局形式.通常差速原理运用于驱动轮(麦克纳姆轮)上,但因麦克纳姆轮结构的特殊性,在运动过程中不可避免地出现打滑现象,会影响位姿检测的精度,因此将差速原理应用在从动轮(测量轮)上,通过这2个测量轮的速度差与水平旋转角度实现AGV位姿的检测.俩测量轮上均装有增量式编码器和绝对值式编码器,增量式编码器记录测量轮旋转的圈数,安装在俩测量轮的水平旋转轴上,俩轮圈数和方向一致说明AGV直线行驶,圈数或方向不一致说明AGV曲线行驶.绝对值式编码器记录测量轮水平方向转动的角度,当全向车直线前行时,绝对值式编码器计数为0,曲线行驶或原地自转时,编码器计数为相应的转动角度值.

图1 全向车车轮布局图Fig.1 The wheel layout of omnidirectional vehicle
测量轮导引方式路径变更灵活,只需改变软件程序即可实现[18],在导引区域内,AGV可依据程序设定的路径自由行走并精确定位,且导引路径可根据实际情况随时变动,充分发挥了AGV的导引柔性,提高了工作效率.
1.2测量轮导引方式的数学模型
全向车的位姿检测通过2个测量轮的速度差来实现,假设运动学模型在理想状态下建立,即:车体为刚性,地面水平,测量轮与地面间无相对滑动.基于双测量轮的全向车运动简化模型如图2所示.
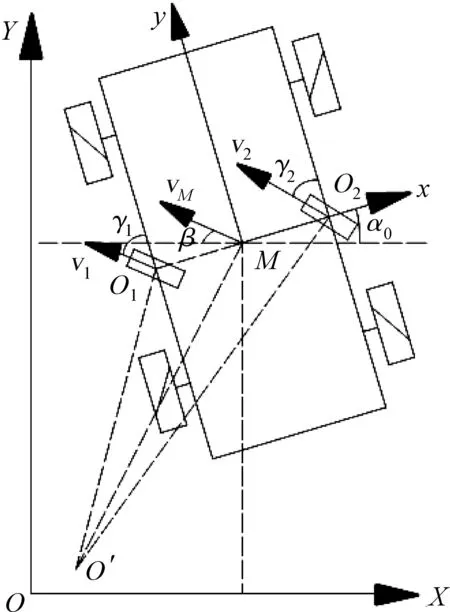
图2 基于双测量轮的全向车运动简化模型Fig.2 The simplified model of omnidirectional vehicle movement based on two measuring wheels
图中XOY为大地坐标系,O1,O2为俩测量轮的轮心,M为O1O2中点,即车体几何中心,且O1O2=2L,轮1、轮2与车体之间的夹角分别为γ1,γ2,轮半径为r,瞬时转弯半径OM=R(t),v1,v2,vM分别为俩测量轮1,2及M点的瞬时速度.

ω1(t)=Δθ1/Δt=dθ1/dt,
(1)
ω2(t)=Δθ2/Δt=dθ2/dt,
(2)
v1(t)=rω1(t),
(3)
v2(t)=rω2(t),
(4)
式中:θ1,θ2分别为测量轮1,2的旋转角度;ω1,ω2为其对应的角速度.
由速度瞬心法分析式(3)和式(4)可得
vM(t)=v1(t)·

(5)
由
ω(t)=vM(t)/R(t),
得

(6)
由式(1)至式(5)可得:

(7)

(8)
则t时刻全向车的位姿向量为

(9)
1.3AGV系统结构框图
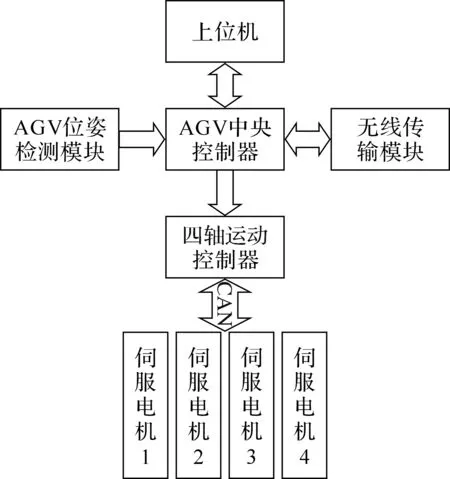
图3 AGV系统结构框图Fig.3 The structure diagram of AGV system
AGV系统结构框图如图3所示.首先,上位机通过程序设定方式给AGV制定运行路径,位姿检测模块中通过俩测量轮实时检测AGV的位置和姿态,并将检测数据传输给中央控制器,经其运算处理,得出AGV的真实运行情况及行驶偏差,CPU发送信号给四轴运动控制器,由其控制4台电机的转速及转向,实时调整整车的运动方式,以完成上位机发送的指定任务.
2 测量轮的结构设计
为满足各行业对全向车应用的需求,AGV对不同的道路环境及复杂的气候条件应具有良好的适应性.针对位姿检测的高精度要求,测量轮的设计中应保证俩轮时刻与地面接触以防止打滑,并能自动适应路面不平引起的上下浮动.测量轮整体结构如图4所示.
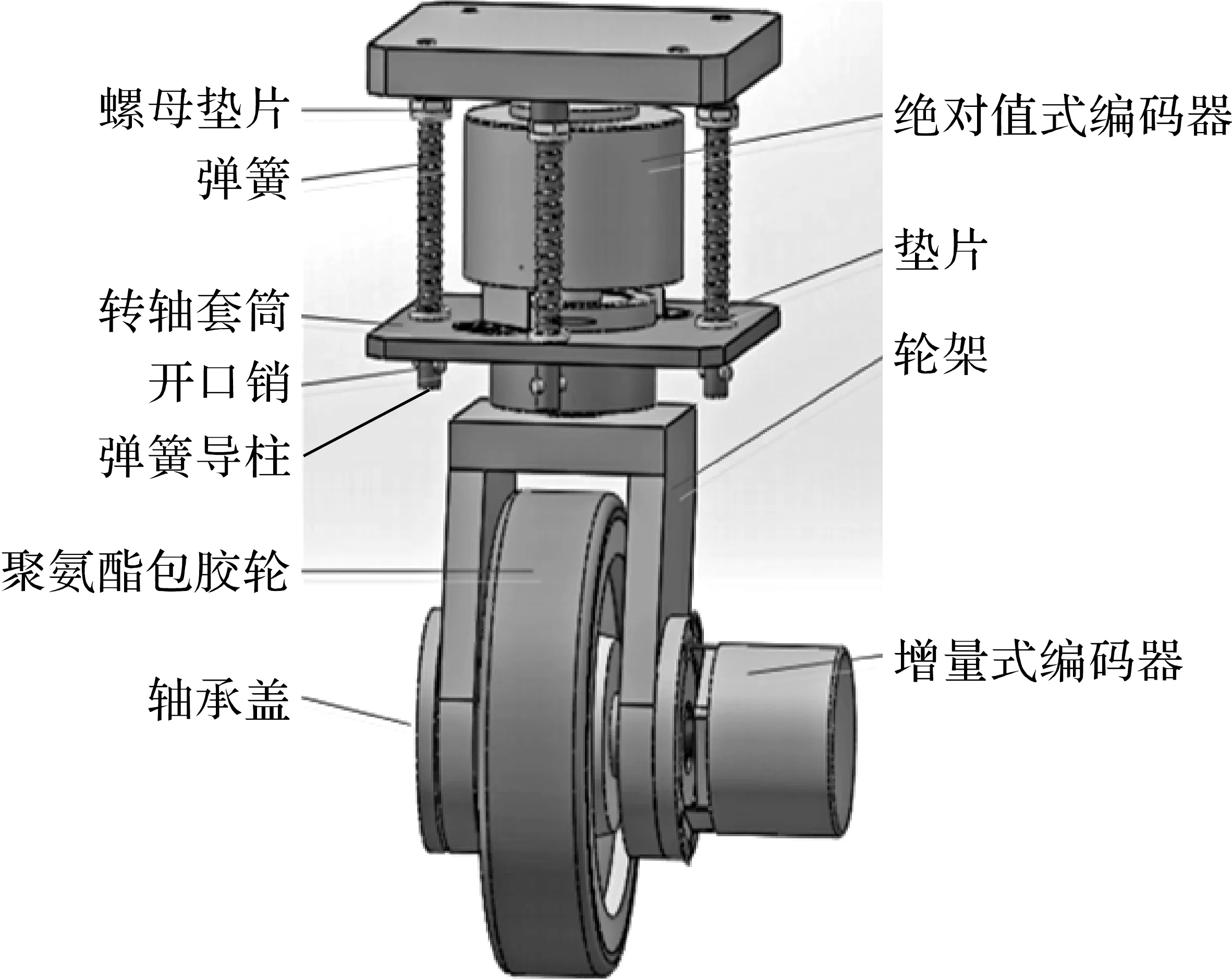
图4 测量轮整体结构图Fig.4 The overall structural diagram of measuring wheel
测量轮主要由聚氨酯包胶轮、轮架、转轴套筒、弹簧导柱、增量式编码器和绝对值式编码器等组成.整个测量轮有3个自由度:绕水平轴线的转动,用于增量式编码器信号采集,实现位移检测;绕竖直轴线的转动,用于绝对值式编码器信号采集,实现转角检测;沿弹簧导柱的上下移动,使弹簧时刻处于压紧状态,在路面不平状态下,保证聚氨酯包胶轮时刻与地面保持接触,提高地面不平度适应性,避免打滑现象的产生,从而保证了编码器计数的准确性.
3 测量轮导引方式的运动学仿真
3.1模型建立及参数设置
三维建模主要运用SolidWorks软件,车体几何尺寸为2 854 mm×1 424 mm×478 mm,四轮连心线尺寸为2 000 mm×1 210 mm,俩测量轮位于车体中间位置,且关于几何中心对称.麦克纳姆轮的小辊子母线利用椭圆弧方程,取点拟合的方法,绕轴线旋转即成辊子体;轮毂的设计在满足强度、刚度要求的同时,还应使加工制造方便.整轮装配时,使小辊子轴线与轮毂轴线成45°夹角,并满足小辊子外轮廓线为圆形.整车模型如图5所示.

图5 全向车模型Fig.5 The model of omnidirectional vehicle
将建立好的模型导入ADAMS中,并对相关参数进行设置,运动副主要包括4个麦克纳姆轮与车架之间的转动副、32个小辊子与4个轮毂之间的转动副、测量轮与地面之间的转动副和测量轮与转轴套筒之间的转动副.小辊子与地面之间、测量轮与地面之间的静摩擦系数均为0.3,动摩擦系数均为0.25,AGV行驶速度设置为0.5 m/s.
3.2仿真及分析
为了验证测量轮导引方式的可行性,运用ADAMS软件,模拟全向车的几种运行方式,分别为直线行驶、曲线行驶和原地自转运动,得出俩测量轮的运动速度和旋转角度曲线图.
1) 直线行驶.
因纵向行驶(Y向)、斜向行驶、横向行驶(X向)在运动特性中均属于直线运动,所以以Y向行驶为例,进行仿真分析.由图6可知,测量轮1和2在Y和X方向上的分速度分别为v1.Y,v2.Y,v1.X,v2.X,曲线基本吻合,Y方向上的速度由0逐渐增加到0.5m/s,而X方向上的速度为0,与初始设定速度吻合,仿真结果符合设计要求.
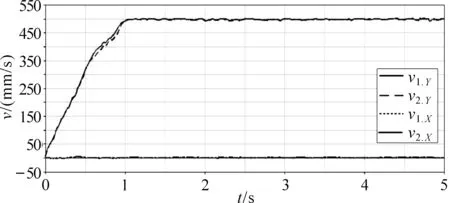
图6 直线行驶时测量轮的速度曲线Fig.6 The speed curve of measuring wheel when driving in a straight line
图7中θ1.Z,θ2.Z(下同)分别表示俩测量轮绕竖直轴线Z转动的角度,俩曲线基本重合,且在0°附近波动,即:Y向行驶时,测量轮水平转动角度为0°,与前述原理吻合.说明通过采集测量轮的速度和转动角度能够正确反映全向车的位置和姿态.
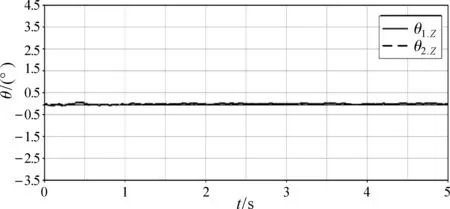
图7 直线行驶时测量轮的水平转动角度曲线Fig.7 The horizontal rotation angle curve of measuring wheel when driving in a straight line
2) 曲线行驶.
以转弯半径2.5 m为例,图8为全向车曲线行驶时俩测量轮合速度v1,v2的曲线,均从0逐渐增加到稳态值,且测量轮1的速度小于测量轮2的速度,证明全向车逆时针转弯且速度稳定后仍有波动的主要原因是测量轮随车身旋转的滞后性及运动中转轴方向的左右摆动.
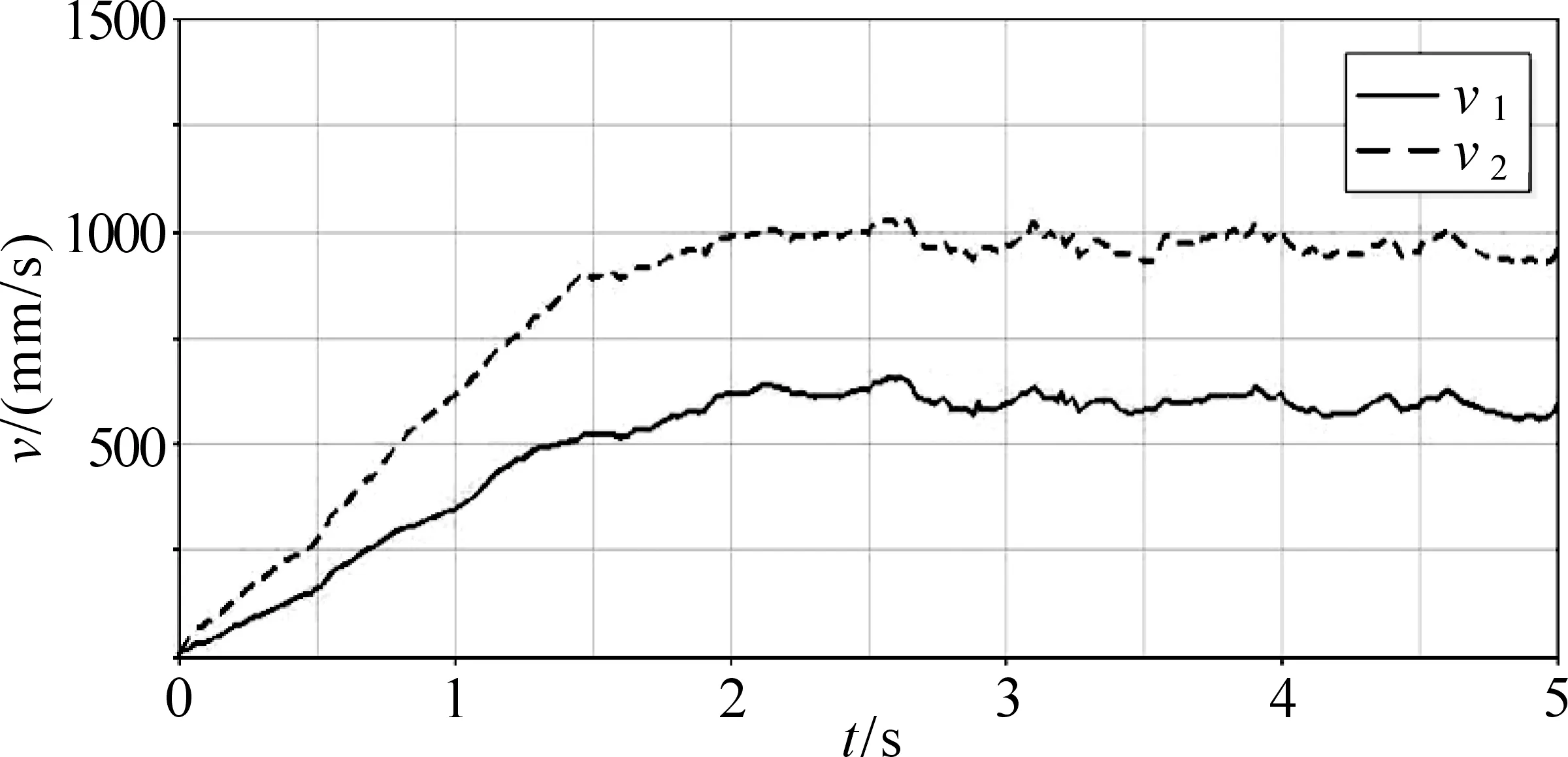
图8 曲线行驶时测量轮的速度曲线Fig.8 The speed curve of measuring wheel when driving in a curve
图9为曲线行驶时俩测量轮绕竖直轴线Z转动的角度θ1.Z,θ2.Z,俩轮曲线基本吻合,且由起始值0°逐渐增加到稳态值,并在稳态值附近上下波动,是由测量轮转轴在水平方向的转动引起的.图8、图9能够清晰地示出全向车曲线运动时位姿的变化过程.
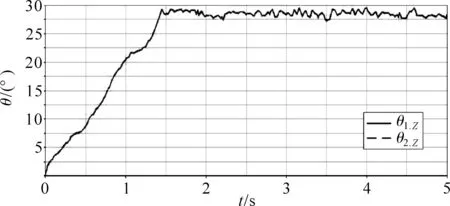
图9 曲线行驶时测量轮的水平转动角度曲线Fig.9 The horizontal rotation angle curve of measuring wheel when driving in a curve
3) 原地自转.
由图10和图11可知,俩测量轮的合速度v1,v2和转动角度基本一致,在0.8 s时测量轮1的曲线出现了大的波动,原因是:全向车逆时针旋转时,测量轮1需调整自身方位,由+Y向转至-Y向,以适应原地旋转的状态.

图10 原地自转时测量轮的速度曲线Fig.10 The speed curve of measuring wheel when in situ rotation
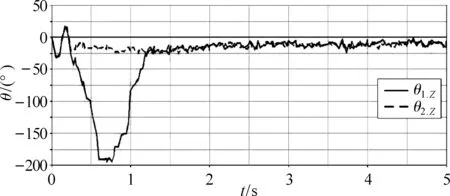
图11 原地自转时测量轮的水平转动角度曲线Fig.11 The horizontal rotation angle curve of measuring wheel when in situ rotation
4 结 论
1) 提出了测量轮导引方式,采用双测量轮,利用差速原理,依靠编码器计数,获取全向车运行状态信息.该导引方式适应性好,性能可靠,导引路径完全自由,发展前景广阔.
2) 建立了测量轮导引方式的数学模型,为运动控制提供了理论依据.介绍了测量轮的结构设计,实现了俩轮与地面时刻接触及自适应不平路面的功能,为位姿检测的准确性提供了保证.
3) 通过ADAMS仿真,得到了全向车在直线行驶、曲线行驶和原地自转三种运行方式中俩测量轮的速度和转动角度曲线图.经分析可知,通过测量轮检测全向车的位置和姿态能够满足设计要求,验证了此导引方式的可行性.
[1] 叶锦华,李迪,叶峰.多信息融合定位的自动导向车鲁棒导引控制[J].电机与控制学报,2013,17(9):111-118.
YE Jin-hua,LI Di,YE Feng.Robust guidance control of nonholonomic AGV with localization based on multi-source information fusion[J].Electric Machines and Control,2013,17(9):111-118.
[2] 蒲亮亮,张小栋.光导AGV智能循迹测控系统的建模与仿真[J].测控技术,2011,30(5):85-88,97.
PU Liang-liang,ZHANG Xiao-dong.Modeling and simulation of intelligent tracking control system for a photoconductive AGV[J].Measurement and Control Technology,2011,30(5):85-88,97.
[3] 武星,楼佩煌,唐敦兵.自动导引车路径跟踪和伺服控制的混合运动控制[J].机械工程学报,2011,47(3):43-48.
WU Xing,LOU Pei-huang,TANG Dun-bing.Integrated motion control of path tracking and servo control for an automated guided vehicle[J].Journal of Mechanical Engineering,2011,47(3):43-48.
[4] 武启平,金亚萍,任平,等.自动导引车(AGV)关键技术现状及其发展趋势[J].制造业自动化,2013,35(5):106-109.
WU Qi-ping,JIN Ya-ping,REN Ping,et al.Present situation and developing trend of AGV key technology[J].Manufacturing Automation,2013,35(5):106-109.
[5] 王荣本,储江伟,冯炎,等.一种视觉导航的实用型AGV设计[J].机械工程学报,2002,38(11):135-138.
WANG Rong-ben,CHU Jiang-wei,FENG Yan,et al.Design for a new type of AGV based on machine vision[J].Journal of Mechanical Engineering,2002,38(11):135-138.
[6] 张文,张作雷,曾连荪,等.基于超声波雷达传感器的AGV导航参数选择[J].传感器与微系统,2014,33(12):34-37.
ZHANG Wen,ZHANG Zuo-lei,ZENG Lian-sun,et al.Selection of AGV navigation parameters based on ultrasonic wave radar sensor[J].Transducer and Microsystem Technologies,2014,33(12):34-37.
[7] 王皖君,张为松,杜亚玲,等.自动导引车导引技术研究现状与发展趋势[J].传感器与微系统,2009,28(12):5-7.
WANG Wan-jun,ZHANG Wei-song,DU Ya-ling,et al.Research state and development trend of guide technology for automated guided vehicle[J].Transducer and Microsystem Technologies,2009,28(12):5-7.
[8] 摆玉龙,杨利君,董存辉.基于MC9S128的电磁导航智能车的设计与实现[J].测控技术,2011,30(11):59-64.
BAI Yu-long,YANG Li-jun,DONG Cun-hui.Electromagnetic navigation smart car control system based on MC9S128[J].Measurement & Control Technology,2011,30(11):59-64.
[9] 季冉鸣,王芳.一种基于磁钉和惯导系统的机器人导航控制算法[J].制造业自动化,2014,36(2):52-54.
JI Ran-ming,WANG Fang.A new method based on magnetic medium and inertial navigation system for the navigation control of AGV[J].Manufacturing Automation,2014,36(2):52-54.
[10] 王伟,白玉成,吴功平,等.一种基于信息融合的巡线机器人电磁导航方法[J].电力系统自动化,2013,37(16):73-79.
WANG Wei,BAI Yu-cheng,WU Gong-ping,et al.An electromagnetic navigation method based on information fusion for inspection robot[J].Automation of Electric Power Systems,2013,37(16):73-79.
[11] 张晓霞,汪传龙,韩刘柱,等.AGV用GPS /DR组合导航信息融合[J].沈阳建筑大学学报(自然科学版),2011,27(1):173-177.
ZHANG Xiao-xia,WANG Chuan-long,HAN Liu-zhu,et al.On the GPS/DR integrated navigation system for AGV [J].Journal of Shenyang Jianzhu University (Natural Science),2011,27(1):173-177.
[12] SEELINGER M,YODER J.Automatic visual guidance of a forklift engaging a pallet[J].Robotics and Autonomous Systems,2006,54(12):1026-1038.
[13] LOW C B,WANG D.GPS-based tracking control for a car-like wheeled mobile robot with skidding and slipping[J].IEEE/ASME Transactions on Mechatronics,2008,13(4):480-484.
[14] 郑炳坤,赖以宗,叶峰.磁导航AGV控制系统的设计与实现[J].自动化与仪表,2014,29(3):6-10.
ZHENG Bing-kun,LAI Yi-zong,YE Feng.Design and implementation of the magnetic navigation AGV control system[J].Automation and Instrumentation,2014,29(3):6-10.
[15] 童峰,许天增,许鹭芬.一种用于自动导引车(AGV)的超声波导航系统[J].高技术通讯,2002,15(8):47-50.
TONG Feng,XU Tian-zeng,XU Lu-fen.An ultrasonic navigation system used for automatic guided vehicle[J].High Technology Letters,2002,15(8):47-50.
[16] 陈顺平,梅德庆,陈子辰.激光导引AGV的自动引导系统设计[J].工程设计学报,2003,10(5):279-282.
CHEN Shun-ping,MEI De-qing,CHEN Zi-chen.Design of intelligent navigation system for laser assisted automated guided vehicle[J].Chinese Journal of Engineering Design,2003,10(5):279-282.
[17] JUNG K,LEE I,SONG H,et al.Vision guidance system for AGV using ANFIS[C].5th International Conference on Intelligent Robotics and Applications.Montreal,Oct.3-5,2012.
[18] 黄玉美,史恩秀,史文浩,等.AGV的混合式导航功能设计[J].制造技术与机床,2004 (4):45-47.
HANG Yu-mei,SHI En-xiu,SHI Wen-hao,et al.Hybrid navigation function design for AGV[J].Manufacturing Technology and Machine Tool,2004 (4):45-47.
Design and simulation of measuring wheel guidancemode for omnidirectional vehicle
ZHU Yan-jie1, YI Ya-li1, JING Chang-hai1, DAI Yong-bo2
(1. College of Mechanical Engineering, Yanshan University, Qinhuangdao 066004, China;2. Beijing Xinghang Mechanical-Electrical Equipment Co.,Ltd., Beijing 100074, China)
Aiming at solving the large measurement error of vehicle operating accuracy caused by the slip of driving Mecanum wheel in the detecting of the position and attitude of omnidirectional vehicle,measuring wheel guiding approach is proposed.Mathematical model is established,and the structure of AGV system is expounded.The layout structure of omnidirectional vehicle was made up of six wheels,including four driving wheels and two driven wheels in the design.The two driven wheels were used as measuring wheels,and the differential principle was applied to the two measuring wheels to get the path information of automatic guided omnidirectional vehicle,at the same time,the problem that the existing omnidirectional vehicle with single measuring wheel couldn’t detect accurately in-situ rotary posture was solved.The structure of measuring wheel with floating three freedoms was put forward.It could maintain contact with ground in real time and ensure the accuracy of position detection.ADAMS simulation for the pose detection of three typical movements which were straight line,curve and in situ rotation is performed.The results show that this guidance mode can meet the accurate detection of position and attitude of omnidirectional vehicle on flexible path setting and has a wide application range.
omnidirectional vehicle; measuring wheel guidance; Mecanum wheel; kinematics simulation

2015-11-27.
本刊网址·在线期刊:http://www.journals.zju.edu.cn/gcsjxb
国家国防科技工业局科工一司资助项目(2012764).
朱艳杰(1987—),女,河北唐山人,硕士,从事自主导引车本体设计与运动性能分析等研究,E-mail:zhuyanjie1987@163.com.http://orcid.org//0000-0002-5465-9658
通信联系人:宜亚丽(1976—),女,山西永济人,副教授,博士,从事新型机械传动的理论与应用技术研究,E-mail:yiyali@ysu.edu.cn.http://orcid.org//0000-0001-8123-4172
10.3785/j.issn. 1006-754X.2016.04.006
TH 11
A
1006-754X(2016)04-0333-05
猜你喜欢
高技术通讯(2021年7期)2021-08-30 08:36:52
现代信息科技(2021年21期)2021-05-07 02:54:12
家庭影院技术(2020年8期)2020-09-11 06:45:22
福建质量管理(2019年18期)2019-10-14 03:56:20
成都信息工程大学学报(2018年3期)2018-08-29 01:08:40
电子设计工程(2017年20期)2017-02-10 03:39:29
光学精密工程(2016年5期)2016-11-07 09:05:55
光学精密工程(2016年4期)2016-11-07 09:05:11
湖北工业大学学报(2016年5期)2016-02-27 13:14:48
电子器件(2015年5期)2015-12-29 08:42:24