基于模糊PID的海洋立管疲劳试验装置控制系统设计
2016-09-07 05:51何新霞
计算机测量与控制 2016年1期
冯 鑫,何新霞
(中国石油大学(华东)信息与控制工程学院,山东 青岛 266580)
基于模糊PID的海洋立管疲劳试验装置控制系统设计
冯鑫,何新霞
(中国石油大学(华东)信息与控制工程学院,山东 青岛266580)
海洋立管作为海洋油气开发的关键设备,在运行期间面临疲劳失效的风险,需要对立管进行疲劳试验;针对海洋立管共振弯曲疲劳试验法,提出基于 S7-300 PLC实现海洋立管共振弯曲疲劳试验装置控制系统的设计思想;采用黄金分割法,寻找确定试件共振频率点;同时,为保障系统能够在该共振频率点稳定运行,采用S7-300 PLC作为核心控制器,结合参数自调节模糊PID控制算法,设计完成疲劳试验装置中转速模糊PID控制器,实现对系统转速的精确控制,使得海洋立管疲劳试验装置控制系统在具有PLC控制灵活、可靠性高等特点的同时,大大提高了其自动化程度。
立管;疲劳试验装置;共振弯曲;黄金分割法;模糊控制;PLC
0 引言
立管是海洋油气开发的关键装备,在运行期间,会因波浪、海流等因素的作用,在立管两侧形成脱离频率与立管固有频率相同的漩涡[1],引起立管的强烈震动,使得立管面临疲劳失效的风险。
为了精确地预报和提高立管疲劳寿命,需要对立管进行疲劳试验[2]。目前,国内外立管结构疲劳试验方法主要包括四点弯曲疲劳试验法、旋转弯曲疲劳试验法和共振弯曲疲劳试验法。本文选用的共振弯曲疲劳试验法优点在于试验频率高,可大大减少试验时间,在试验时只需控制立管试件在其固有频率振动。鉴于此,本文以西门子S7-300PLC为核心控制器[3],变频器和异步电机为执行机构建立疲劳试验平台,首先采用黄金分割法搜寻立管共振频率,然后利用参数自调节模糊PID控制算法,实现对电机转速的精确控制,完成对试验机控制系统的高效、精确控制。
1 共振弯曲疲劳试验原理
图1为海洋立管共振弯曲疲劳试验机控制结构示意图。由计算机、PLC、变频器、连有旋转编码器的异步电机、偏心质量块、动载室、静载室和支撑座构成。PLC为核心控制器,电动机为动力源,带动偏心质量块旋转,动载室将偏心质量块引起的离心力传递至立管试件,通过不断地改变电动机的转速,测得各个转速对应的应变值,认为应变值最大对应的频率为立管试件共振频率,并控制电机在此共振频率点恒速稳定运行[4]。
在确定立管试件时,需先进行模态分析,确保试件的一阶固有频率在20~40 Hz。若试件固有频率过低,试验时间将会延长,失去了该方法的优势;若立管试件固有频率过高,超过50 Hz,由于电机与试件之间没有加、减速装置,立管共振频率即为电机转动频率,这时对电机的转速要求就超过了3 000 r/min,异步电机型号难以确定。

图1 共振疲劳试验机控制结构图
2 黄金分割法寻优
由于立管试件结构和材料的不同,每根立管的固有频率也是不同的,因此在试验时都需要先确定试件的固有频率,为疲劳试验装置提供一个明确的控制目标。
黄金分割法是控制寻优的典型算法,适用于区间[a,b]上的一维单谷函数求极小值问题,该方法以寻优速度快,算法简单,效果明显著称。其基本原理是:按照“去劣存优”原则、对称原则、以及等比收缩原则来逐步收缩搜索区间[5-6]。本文将其改进,运用黄金分割法寻找函数极大值,用以判断海洋立管的共振频率点。具体流程图如图2所示。

图2 黄金分割法控制流程图
初始频率分割区间为[fa0,fb0],根据黄金分割法基本思想,在该区间上取两个点X10和X20,使满足:
测量这两点的应变值S1和S2,通过比较应变值S1和S2的大小确定出新的频率区间。如此反复进行,每次搜索后区间将按照黄金比例0.618来缩小,而应变最大值都会包含在新区
间内。这样不断的优化,直到满足预先设置好的精度,选择最后一个频率区间的中点作为最优值,即为立管的共振频率点。
3 疲劳试验装置模糊PID控制的PLC实现
立管试件固有频率确定后,需控制试验装置带动试件在该频率点稳定振动。由于交流电机是一个非线性时变的控制对象,很难获得准确的数学模型,常规闭环PID控制不能获得极佳的控制效果。
为此,本设计选用型号为CPU314C-2DP的西门子PLC为核心控制器,与模糊PID控制算法相结合,采用直接查表方式(即先通过MATLAB进行模糊PID控制器离线设计,获得模糊控制查询表,再利用PLC在线查询的方式)来实现参数自调节模糊PID控制器的设计。
3.1模糊PID控制器设计
转速参数自调节模糊PID控制器结构图如图3所示,选定的模糊控制器采用二维模糊控制器[7],输入变量均为转速误差e和转速误差的变化率ec,输出变量分别为PID控制器比例系数Kp的调节量ΔKp、积分系数Ki的调节量ΔKi和微分系数Kd的调节量ΔKd。与PID各参数的初值相加,得到一个控制变频器输出控制量,实现对电机的调速。
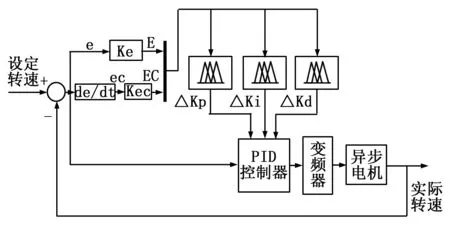
图3 参数自调节模糊PID控制器结构图
设定模糊语言变量E和EC的模糊论域均为[-6,6],输出模糊语言变量dKp、dKi和dKd的模糊论域均为[-10,10]。考虑到实现的快速性,模糊语言的子集E、EC、dKp、dKi和dKd均为{负大(NP),负中(NM),负小(NS),零(ZO),正小(PS),正中(PM), 正大(PB)}。根据控制要求,按照上述模糊变量论域量化等级,建立模糊控制规则表[8-9],如表1所示。进而可得到模糊控制查询表,如表2所示。
利用MATLAB建立系统仿真模型,常规PID控制与参数自调节模糊PID控制进行对比仿真研究。电机转速设定为1 000 r/min,t=2.5 s系统受到扰动。转速仿真波形如图4所示。
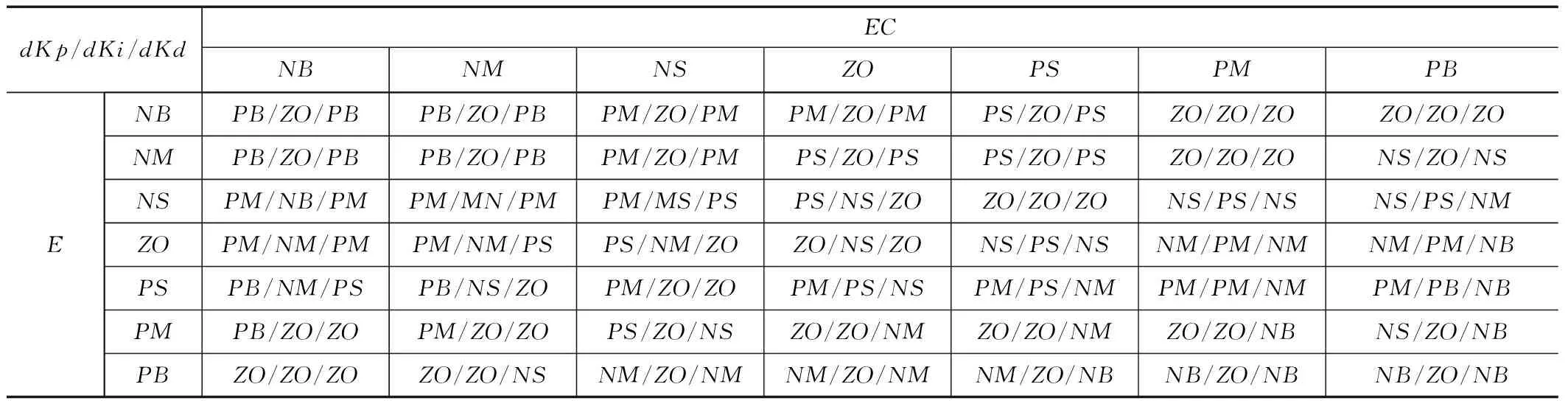
表1 模糊控制规则表
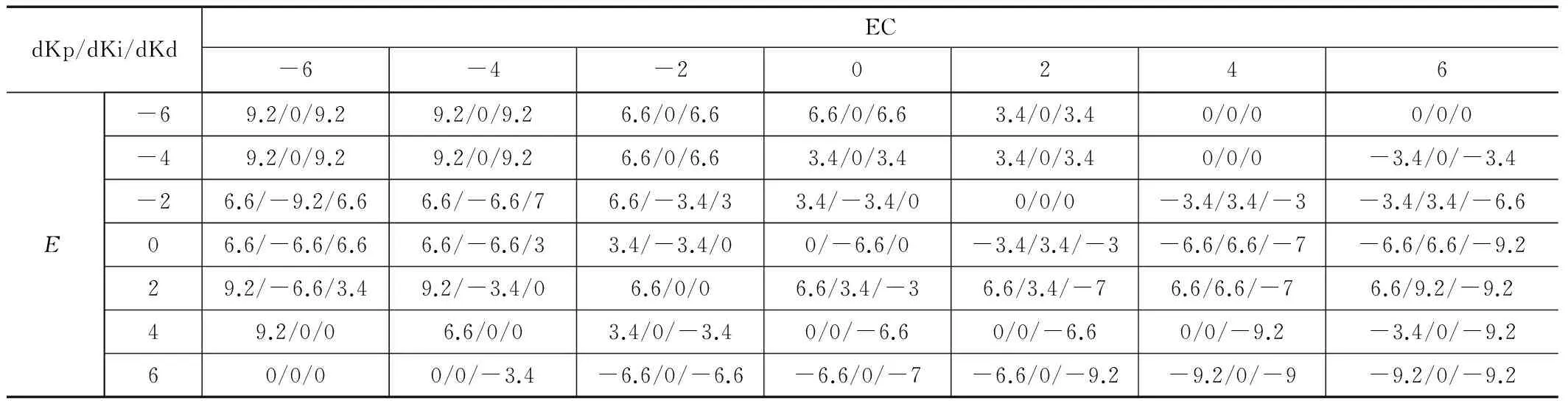
表2 模糊控制查询表
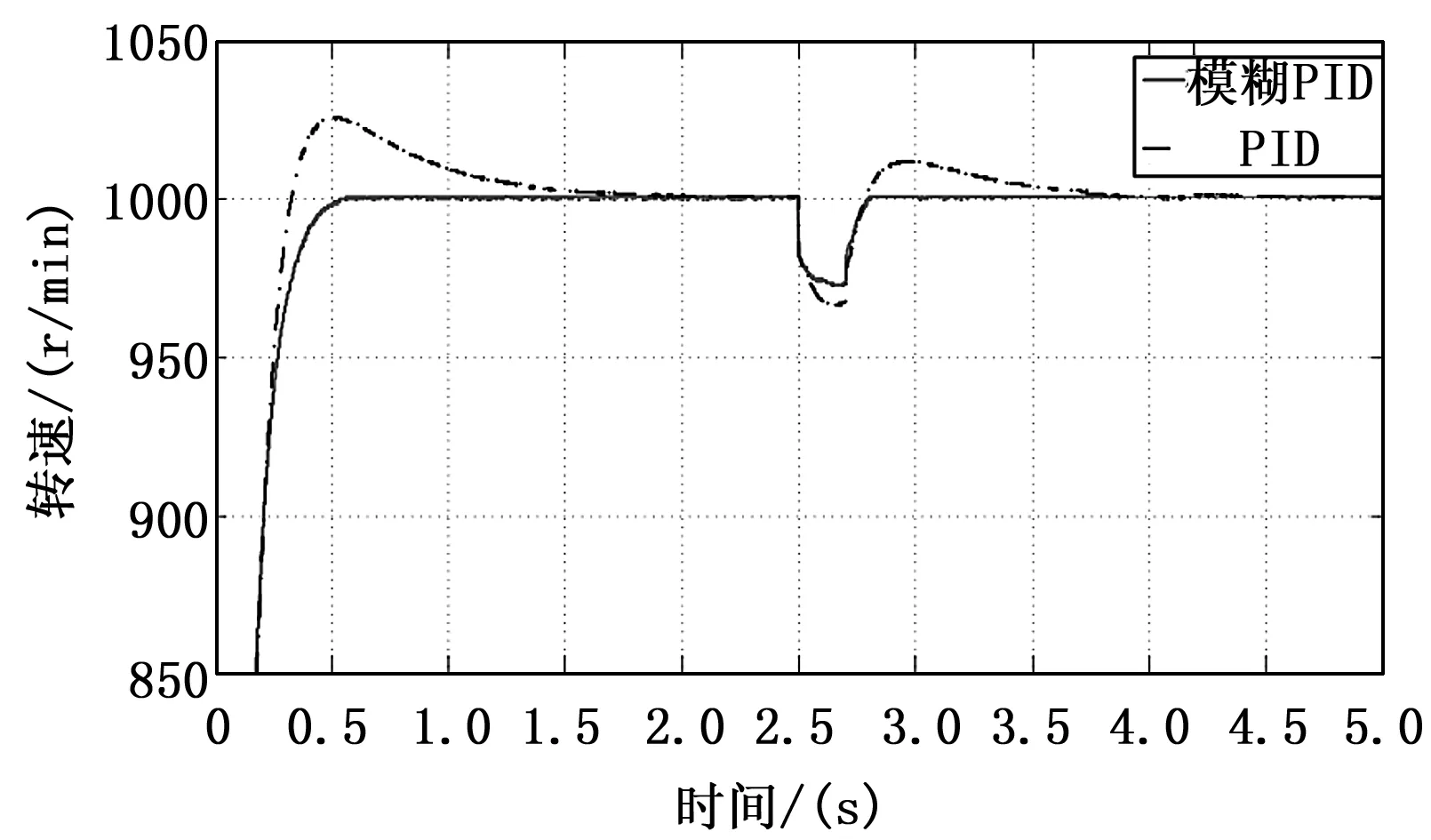
图4 系统仿真模型图
结果表明,采用参数自调节模糊PID控制比常规PID控制超调小,到达稳态时间短,且鲁棒性得到明显增强。
3.2PLC程序设计
在整个控制系统设计中,PLC模糊控制器程序的设计是整个系统设计的核心。其控制程序流程图如图5所示。
可以看出模糊控制器程序设计[10]包含以下5个步骤:①编码器等测量部件将转速反馈值和设定值传给PLC,PLC定时的计算出误差e和误差变化率ec。②将误差e和误差变化率ec分段模糊化为E和EC。③根据MATLAB仿真得到输出模糊语言变量dKp、dKi和dKd的查询表,建立共享数据块存储模糊数据。④由E和EC查询共享数据块中的数据,确定当前的输出模糊语言变量dKp、dKi和dKd的值,并乘以各自的量化因子得到PID控制器各参数的调节量。⑤最后通过西门子S7-300的PID控制模块输出控制值,实现对疲劳试验装置的控制。
3.3试验结果与分析
调试过程中,PLC分别采用常规PID控制算法和模糊PID控制算法对电机转速进行对比控制。模糊控制器的误差量化因子Ke=6/1 410,误差变化率量化因子Kec=6/30,输出的比例量化因子KU1=0.03,输出的积分量化因子KU2=50,输出的微分量化因子KU3=10;PID控制器的各初始值分别为p=0.7,i=2 000,d=200。利用WINCC监控,其试验结果如图6所示,其中图(a)采用了常规PID控制算法,图(b)采用了模糊PID控制算法。

图6 WINCC监控图
从图6可以看出:(1)采用常规PID控制算法的电机需要1分钟的时间到达设定转速;而在模糊PID控制下的电机只需40多秒就能达到设定值,响应速度明显比常规PID控制的快。(2)在电机刚启动时,转速直线上升,这个过程模糊PID控制算法和常规PID控制算法的控制效果基本一致。(3)在4~10 s时,采用常规PID控制的电机,转速存在微弱的波动;而模糊PID算法控制下的电机不存在这种现象。(4)在10 s之后的时间段,采用模糊PID控制的电机转速上升速度明显比常规PID控制的快。综其原因在于模糊PID控制的系统可以在线实时修改参数,根据现场需要对PID各参数进行微调,使得系统控制更加灵活高效,更好地满足了共振弯曲疲劳试验机稳定,快速的性能要求。
4 结论
本文结合海洋立管共振弯曲疲劳试验法,采用黄金分割法快速寻找到试件共振频率点,有效的提高了试验装置的效率。同时,将模糊控制与PLC技术相结合,采用MATLAB离线设计和PLC在线查询的方法实现模糊PID控制器的设计,使得立管共振弯曲疲劳试验装置控制系统既具有了PLC控制灵活、可靠、抗干扰能力强等特点,又大大提高系统自动化程度。
[1]胡勇, 代峰燕, 周灿丰, 等. 海洋深水立管涡激振动实验研究的发展状况[J]. 北京石油化工学院学报, 2014(2) :50-55.
[2] 刘秀全, 陈国明, 畅元江, 等. 海洋油气立管疲劳试验方法[A]. 第十三届中国科协年会第13分会场-海洋工程装备发展论坛论文集[C]. 2011.
[3] 瞿枫, 徐中宏, 孙冀. 基于西门子S7-300 PLC的模糊控制实现[J].南京师范大学学报.2007,7(4):23-27.
[4] 孙友义, 鞠少栋, 蒋世全, 等. 超深水钻井隔水管-井口系统涡激振动疲劳分析[J]. 石油学报, 2011,32(6):1050-1054.
[5] 宋永东, 张玉强, 张建华. 黄金分割法用于PID参数优化整定技术的研究[J]. 西安工程科技学院学报, 2007, 21 (2):262-266.
[6] 韩伟, 王宏华, 贾艳刚. 改进黄金分割法在光伏发电MPPT中的应用[J]. 电源技术, 2014(2):282-285.
[7] 杨璐, 雷菊阳. 基于MATLAB的参数自整定模糊PID控制器的两种设计方法[J]. 计算机测量与控制, 2015,23(4):1212-1214.
[8] 李敬兆, 张崇巍. 基于PLC直接查表方式实现的模糊控制器研究[J]. 电气应用, 2001(9):18-21.
[9] 朱斌, 罗益民, 袁启昌, 等. 基于模糊PID控制的循环水自动加药与监测系统[J]. 计算机测量与控制, 2008,16(6):796-798.
[10] 李剑, 刘渭苗, 徐长安, 等. 模糊PID方法用于液压比例阀的高精度定位控制[J]. 重型机械, 2012, (1):14-16.
Design of Marine Riser Fatigue Testing Machine Control System Based on Fuzzy PID
Feng Xin, He Xinxia
(College of Information and Control Engineering, China University of Petroleum(East China),Qingdao266580,China)
During operation marine riser is susceptible to fatigue failure, so riser fatigue tests should be carried out. The design concept of realizing marine riser resonant bending fatigue testing machine control system by using S7-300 are fully described. Golden section method is used to find the resonance frequencies of the specimen. Meanwhile, in order to make the system running at resonant frequencies, the S7-300 PLC is taken as the core controller and combined with the parameters self- adjusting fuzzy PID algorithm to design Fuzzy PID controller. It is not only own the control characteristics of flexible and reliable of PLC, but also greatly improved the automation level of the marine riser testing machine control system.
riser; fatigue testing machine; resonant bending; golden section; fuzzy control; PLC
2015-07-27;
2015-09-17。
国家科技重大专项课题(2011ZX05026-001-05)。
冯鑫(1991-),男,山东济宁人,硕士研究生,主要从事电力电子与电力传动方向的研究。
何新霞(1966-),女,河南滑县人,副教授,硕士,主要从事油气测控技术、电力传动及控制系统方向的研究。
1671-4598(2016)01-0119-03
10.16526/j.cnki.11-4762/tp.2016.01.033
TP273+.4
A
猜你喜欢
建材发展导向(2019年11期)2019-08-24
中国特种设备安全(2019年2期)2019-04-22
中国自行车(2018年11期)2018-12-03
中国自行车(2018年9期)2018-10-13
舰船科学技术(2016年1期)2016-02-27
Beijing Review(2015年43期)2015-11-25
云南电力技术(2015年2期)2015-08-23
航空制造技术(2015年3期)2015-05-30
西南石油大学学报(自然科学版)(2015年5期)2015-04-16