
基于AHP-模糊综合评价法的轮履复合型搜索机器人性能评价及其软件开发
2016-09-05 11:23胡卫建
北京工业大学学报 2016年6期
赵 京,杨 聪,胡卫建
机械工程
基于AHP-模糊综合评价法的轮履复合型搜索机器人性能评价及其软件开发
赵京1,杨聪1,胡卫建2
(1.北京工业大学机械工程与应用电子技术学院,北京100124;2.中国地震应急搜救中心,北京100049)
针对中国在地震搜救机器人评价方面的研究尚浅,首先,介绍轮履复合型搜索机器人的运动模式,构建了一套性能评价指标体系,并制定了指标的详细测试标准,为实际测试提供参考依据.其次,根据指标多层次、多因素且定量与定性相结合的特点,提出应用AHP-模糊综合评价法对轮履复合型搜索机器人评价.第三,基于构建的性能评价指标体系与AHP-模糊综合评价法,提出了一套完整的轮履复合型搜索机器人的综合评价体系.第四,基于该评价体系开发了一套用于轮履复合型机器人性能评价的软件.该软件可管理机器人数据、专家数据、指标体系和评价标准,并可根据专家打分和实测数据得出评价结果.最后,通过实例验证了该评价体系和软件的有效性.结果表明:该轮履复合型搜索机器人的综合性能处于中等水平.
搜索机器人;层次分析法;模糊综合评价;系统软件
使用轮履复合型搜索机器人参与地震灾后搜索任务不仅可以有效增加搜索效率,为被困人员争取更多的生命时间,还能进入救援人员难以进入的复杂事故现场,减少救援人员伤亡,避免酿成更多的悲剧[1].同时,轮履复合型搜索机器人还可以搭载起缝模块、顶撑模块、剪切模块等完成扩大废墟缝隙、顶起废墟障碍物、切割金属或硬块等救援任务.目前,中国对轮履复合型搜索机器人的研究已有一定成效,然而对其综合性能的评价还处在探索阶段.
轮履复合型搜索机器人的性能评价是一个多目标决策问题,目前普遍的评价方法有灰色聚类法[2]、主成分分析法(principal components analysis,PCA)[3]、层次分析法(analytic hierarchy process,AHP)[4]、模糊评价法[5]等.鉴于目前国内的搜索机器人样本数量不大,因此要选用适合少量样本的评价方法.因为轮履复合型搜索机器人的性能指标有定性指标,也有定量指标,所以要选用定性定量相结合的方法.通过总结以往的综合评价方法,本文提出运用AHP-模糊综合评价法对轮履复合型搜索机器人性能进行综合评价.
AHP法是20世纪70年代由美国著名运筹学家、匹兹堡大学教授Saaty提出的[6],它是一种常用的定量与定性分析相结合的系统评价方法,适用于解决多目标、多准则、多要素、多层次的非结构化战略决策问题[7],它将评价对象的指标集按照事物的规律有意识地分为若干个条理化的层次和因素,通过将因素进行两两比较,得出因素之间的重要性关系,通过计算从而得出每个因素相对于上一层的权重.AHP法经过多年的发展,衍生出改进 AHP法[8]、灰色AHP法[9]、模糊 AHP法[10]等多种综合分析方法.模糊评价法运用模糊数学和模糊统计的原理,将事物的所有影响因子都纳入考虑范畴之内,进一步对该事物的优劣进行合理科学的评断.其特点是给出一个模糊隶属度来表示指标值,能有效地解决不确定、难以量化的问题.AHP法与模糊综合评价法相结合,使用AHP法确定评价指标体系中各项指标的权重,再用模糊综合评价法对模糊指标进行综合评价,2个方法相辅相成,共同提高了评价的可靠性、科学性和有效性.
本文介绍了轮履复合型搜索机器人的工作原理和运动模式,构建了轮履复合型搜索机器人指标体系,确立了各个指标的测试方法及评价标准,并采用AHP-模糊综合评价法对其进行综合评价.最后,开发了一套性能评价软件.
1 轮履复合型搜索机器人及其性能指标
1.1机器人简介
该机器人的行走机构是一种新型轮履复合变形移动机构平台,图1为实物样机图.这种平台能实现轮式和履带式2种运动模式,并能根据地面约束力进行轮履互换,具有更高的越障性、移动稳定性和机动灵活性.履带轮单元由1个四杆机构、1个履带驱动轮和3个履带支撑轮共同组成,履带的几何形状可根据路况做出调整.
机器人在不同环境、不同工作任务下可以切换不同的运动模式:
1)当机器人在平坦地面运动时,履带轮单元与地面线接触,如图2所示.此时运动轮与履带的线速度相同,这种运动方式称为轮式运动模式.
2)当机器人遇到障碍时,由轮式运动转化为履带式运动,此时运动轮单元脱离地面,履带轮单元与地面呈面接触,并根据垂直障碍高度(图3(a))、斜坡角度(图3(b))和连续台阶的高度和宽度(图3(c))调整出合适的运动姿态(几何形状).而当路面障碍超出机器人的越障能力时,就会出现停滞或倾翻.
3)当机器人越过废墟重新恢复到地面约束力较小的平坦硬路面时,会调整运动模式逐渐恢复到运动速度较大的轮式运动继续前行.
1.2性能指标体系
综合对搜索机器人性能指标的研究,遴选归纳出轮履复合型搜索机器人的整套性能指标体系,构建了如图4所示的层次结构,分别为目标层A、准则层B和指标层C.目标层为轮履复合型搜索机器人,其下准则层有4个因素,分别为生存能力、运动能力、搜索感知能力和通讯控制能力.准则层的每个因素下又有3~12个指标.指标层中防水防腐能力、耐热抗冻能力、路径规划能力、操作界面情况为定性指标,其余为定量指标.
1.3指标测试方法
本课题针对特定评价对象,参考工业机器人和现有的移动机器人的相关标准[11-12],制订了轮履复合型搜索机器人的各项指标测试标准,旨在为实际测试提供参考依据,并为测试结果的评价提供统一标度.
除防水防腐能力和耐热抗冻能力外,所有的指标都在人体适宜的正常温度、白天晴朗、风力小于3级、无水无污染的测试环境下进行.运动性能试验均在机器人的电池充满电的条件下进行.
以下列举其中部分重要指标测试方法:
防水能力:在机器人的开机性能和基本运动性能都正常的情况下关机,将其浸入其技术指标所述的防水深度的水中30 min(如未指定,10 cm),或用喷头向机器人喷淋净水2 min.取出机器人或停止喷水,再测试开机性能和基本运动性能是否正常.
防腐能力:在机器人开机性能和基本运动性能都正常的情况下,将系统关机,将机器人依次放入含SO2、氨水及U-238铀系的危险环境中,放置2 h.取出机器人并开机,再次测试开机性能和基本运动性能是否正常.
复杂路面行走平顺性:设置50 m复杂颠簸瓦砾路面,在机器人车身装置竖直方向加速度传感器,控制机器人以50%的最大轮式运动速度匀速行驶.运动结束,查看输出竖直方向加速度曲线,计算各峰值的平均值.
生命体辨识概率:取70%最大有效搜索半径及70% 最大有效搜索深度处置生命体,各实验5次,统计成功感知的概率.
最大无线控制距离:如果技术说明书上提供了,以说明书上的值为起始值,设置无线控制距离(如果技术说明书上没提供,以10 m为起始值),测量3次.3次中至少有1次成功操控机器人,则增加1个长度单位,若1次都没有成功,则减少1个长度单位,继续测量3次.依次循环,直至不能继续增加(或不用继续减少)为止,记录最大值.
2 AHP-模糊综合评价方法
AHP-模糊综合评价法的基本流程如图5所示.
2.1摇用AHP法确定指标权重
1)建立层次结构
根据评价目标及其涉及的各影响因素,将它们划分为目标层、准则层和指标层等多个层次,构建一套具有阶梯型层次结构的指标体系.层次结构模型建立后,上下级指标的从属关系就确定了,接下来需要对每一层次中各指标的相对重要性做出判断.
2)构造判断矩阵
设A层因素Ak与下一个层次B中的因素B1,B2,…,Bn有联系,则可以构造如表1所示的判断矩阵.其中bij表示Bi对Bj的相对重要性,其值一般可用数字1~9及其倒数表示.1表示同等重要,9表示绝对重要,数值越大则相对重要程度越高.
3)求解判断矩阵
先将判断矩阵进行标准化,求每行的和,然后进行归一化处理,即得到单一准则下各元素的权重向量w(w1,…,wn).

表1 判断矩阵Table 1 Judgment matrix
CR越小,表示判断矩阵的一致性越好.当CR<0.1时即认为判断矩阵的一致性较好,视为通过一致性检验,否则必须对判断矩阵重新进行校正,直到其具有满意的一致性为止.
2.2摇模糊综合评价
1)建立模糊对象因素集和评语集
建立因素集U={u1,u2,…,un},其中ui(i=1,2,…,n)为评价因素,n表示同一层次上单因素的个数.建立评语集V={v1,v2,…,vm},其中m为评语等级数.
2)建立隶属度矩阵
对于定性指标,统计出每个评语等级被评价次数与评价专家数的比例,即为定性指标的量化模糊隶属度;对于定量指标,可根据评价标准和实测数据,通过隶属度函数公式计算其量化模糊隶属度.本文采用的隶属度函数为降半阶梯形分布函数.
当j=1时,
当j=m时,
式中:rj表示第j个评价等级的隶属度;xi表示各个指标的实测值;uj表示各个评价等级的评价标准.因此,对于每一个因素集都可得到n行m列的隶属度矩阵
3)多级模糊综合评价
模糊综合评价是一个多级逆推的过程,先从最末2层相邻因素层开始计算,根据因素集的指标权重向量w(w1,w2,…,wn)与模糊隶属度矩阵R,不断往前推出上一级的模糊隶属度B=wR,从而可得到顶级目标层的模糊隶属度.
3 基于AHP-模糊综合评价法的轮履复合型搜索机器人性能综合评价
1)指标权重计算
根据专家提供的判断矩阵表,可以分别得到准则层B对目标层A(记为A-B)、指标层C对准则层B(记为B-C)的指标权重结果,并进行一致性检验,结果如表2所示.

表2 指标权重及其一致性检验Table 2 Index weight and its consistency check
2)准则层的模糊隶属度矩阵
请10位专家参与定性指标的评语确定,得出定性指标的模糊隶属度,如表3所示.

表3 定性指标专家评语统计表Table 3 Qualitative index expert comment statistics table
定量指标的实测数据如表4所示.得到该层单因素隶属度矩阵如下:
生存能力
运动能力
搜索感知能力
通讯控制能力
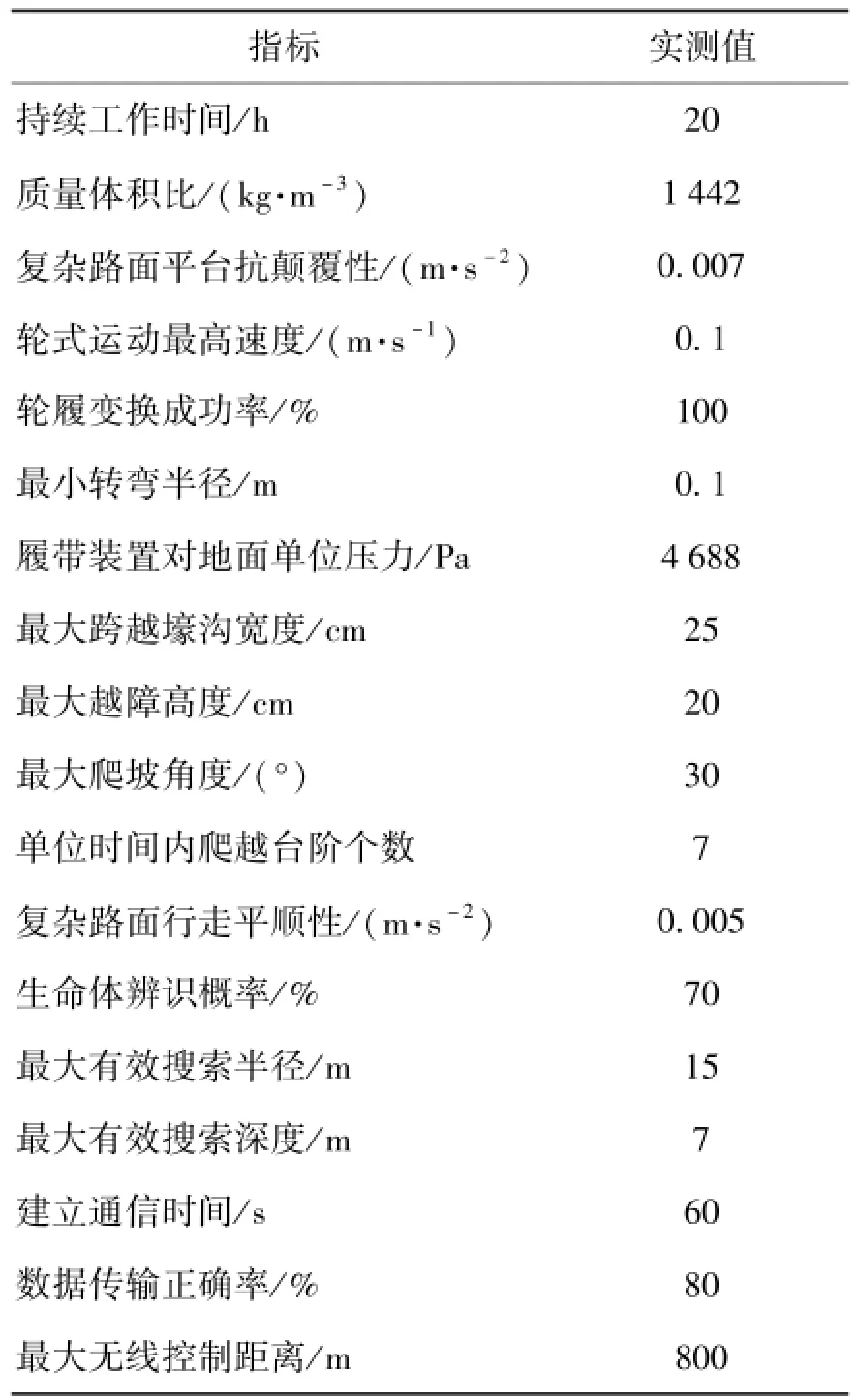
表4 定量指标实测数据Table 4 Quantitative index measured data
将这些模糊隶属度矩阵分别与表2中对应的权重向量相乘,可得到准则层的隶属度矩阵
3)目标层的模糊综合评价
同理将目标层模糊隶属度矩阵与表3中对应权重向量相乘,可得到目标层的隶属度矩阵
4)评价结果
根据评价结果可知,轮履复合型搜索机器人有35.43%的可能属于“好”,有49.54%的可能属于“中”,有15.03%的可能属于“差”.根据最大隶属度原则,可能性最大的“中”等级即最终的评价结果.
4 评价系统软件的开发
根据该评价体系开发了一套适用于地震搜救机器人性能评价的软件,该软件名为“机器人效能评估系统”,采用Microsoft Visual Studio 2010 C#编制.软件主界面如图6所示.下面仅以轮履复合型搜索机器人介绍该软件.
4.1软件结构设计
本软件设计严格遵循AHP-模糊综合评价法的形式和流程,包含数据管理和效能评估两大模块.
数据管理模块包含机器人信息管理、专家信息管理、效能指标体系、定量数据映射4个功能.该模块的主要任务是管理基础数据,是开启性能评价的必备前提.
效能评估模块包含判断指标权重、录入实测数据、查看评估结果3个功能,该模块的主要任务是录入评价数据,通过后台运算得出评价结果.
4.2软件功能设计
软件功能介绍如表5所示.
4.3软件使用文档
使用该软件的必备资料如下:1)定量数据映射表(1份);2)专家判断矩阵表(1份或以上);3)定量指标实测数据表(1份);4)定性指标专家评语表(1份).
4.4软件使用流程
1)基础数据录入
先录入待评价的机器人数据,再录入参与该机器人评价的专家数据(如已录入则无需再次录入),然后检查并确认机器人性能指标体系,最后将评价标准录入定量数据映射表.
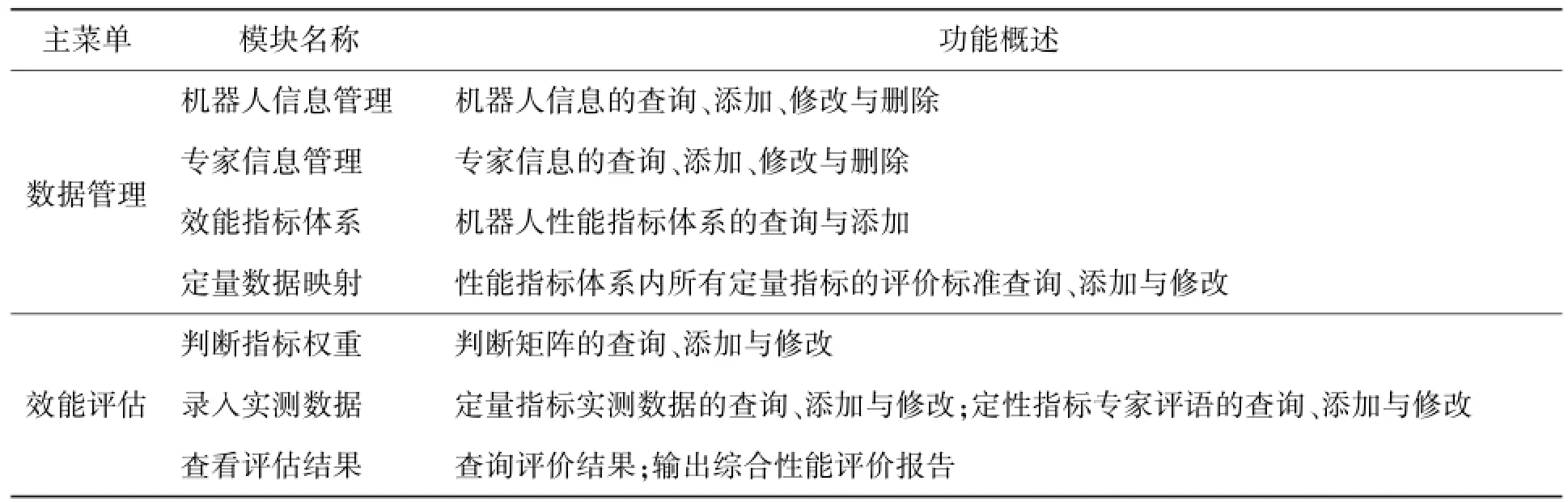
表5 软件功能介绍Table 5 Software function introduction
2)机器人性能评价
判断指标权重的界面如图7所示.用户选中要评价的机器人,再选择参与评价的专家,点击“开始”即可录入判断矩阵,点击“下一级”进入下一个判断矩阵.软件可根据所输入的数据自动计算各个指标的权重.如有多个专家参与该过程,软件会自动算出其平均值作为指标的权重.
录入实测数据的界面如图8所示.用户选中要评价的机器人,点击“开始”即可录入定量实测数据和定性专家评语.软件可根据实际录入情况自动计算出平均值.同样,根据定性指标的实际录入评语等级情况,点击“完成并汇总”得出定性指标结果汇总.录入完成后点击“保存并显示得分”即可弹出最终评价结果.
查看评估结果界面可以查看历史评价结果,并可输出1份word形式的性能评价报告.报告内包含该机器人所有数据、参与专家的数据、评价过程原始数据以及最终的评价结果.
5 结论
1)建立了完整的轮履复合型搜索机器人的评价指标体系,并制定了定性和定量指标的测试方法和评价标准,采用AHP-模糊综合评价法对该搜索机器人的性能进行了综合评价.该种评价方法简单易懂,实际操作性强,适用于地震搜救特种机器人的性能评价,得出的结果科学可靠.
2)从准则层的隶属度结果可以看出,该轮履复合型搜索机器人的运动能力较弱,还处于较差的水平;通信控制能力较强,处于较好的水平.
3)从目标层的隶属度结果可以看出,该轮履复合型搜索机器人样机的综合性能处于中等水平,还有很大的发展空间.
4)开发了一套完善的轮履复合型搜索机器人性能评估系统软件,为机器人性能评估提供了有效的工具.
[1]JENNIFER C,ROBIN R M.How UGVs physically fail in the field[J].IEEE Transactions on Robotics,2005,21(3):423-437.
[2]史国庆,高晓光,吴梦舒.基于灰色聚类法的惯导仿真系统可信度评估[J].西北工业大学学报,2011,29(6):960-964.
SHI G Q,GAO X G,WU M S.A better credibility evaluation of inertial navigation simulation system using grey clustering method[J].Journal of Northwestern Polytechnical University,2011,29(6):960-964.(in Chinese)
[3]赵京,李立明,尚红,等.基于主成分分析法的机械臂运动灵活性性能综合评价[J].机械工程学报,2014,50(13):9-15.
ZHAO J,LI L M,SHANG H,et al.Comprehensive evaluation of robotic kinematic dexterity performance based on principal component analysis[J].Journal of Mechanical Engineering,2014,50(13):9-15.(in Chinese)
[4]丁忠军,高翔,王成胜,等.基于层次分析法的载人深潜器潜航员职业特征研究[J].海洋工程,2014,32(6):111-118.
DING Z J,GAO X,WANG C S,et al.Studies for the job characteristics of manned deep submersible pilot based on analytic hierarchy process[J].The Ocean Engineering,2014,32(6):111-118.(in Chinese)
[5]尚淑丽,顾正华,赵世凯,等.基于模糊逻辑的水电工程生态效应综合评价[J].浙江大学学报(工学版),2014,48(9):1603-1609.
SHANG S L,GU Z H,ZHAO S K,et al.Comprehensive evaluation of ecological effect of hydropower projects based on fuzzylogic[J].JournalofZhejiangUniversity(Engineering Science),2014,48(9):1603-1609.(in Chinese)
[6]SAATY T L.Modeling unstructured decision problems-the theory of analytical hierarchies[J].Mathematics and Computers in Simulation,1978,20(3):147-158.
[7]王建,黄凤岗,景韶光.AHP中判断矩阵一致性调整方法研究[J].系统工程理论与实践,2005(8):85-91.
WANGJ, HUANGFG, JINGSG.Studyon consistencyregulation for the judgment matrix in AHP[J]. Systems Engineering-Theory&Practice,2005(8):85-91.(in Chinese)
[8]段若晨,王丰华,顾承昱,等.采用改进层次分析法综合评估500 kV输电线路防雷改造效果[J].高压电技术,2014,40(1):131-137.
DUANRC, WANGFH, GUCY, etal. Comprehensiveevaluation of500kVtransmissionline lightning protection effect based on improved analytic hierarchy process[J].High Voltage Engineering,2014,40(1):131-137.(in Chinese)
[9]罗英,乔锋,吴立东,等.基于AHP法和灰色关联法的辣椒果实外观品质评价[J].中国农学通报,2010,26(2):157-161.
LUO Y,QIAO F,WU L D,et al.Evaluation of fruit appearance quality for pepperbasedontheanalytic hierarchy process and the grey correlation method[J]. Chinese Agricultural Science Bulletin,2010,26(2):157-161.(in Chinese)
[10]兰继斌,徐扬,霍良安,等.模糊层次分析法权重研究[J].系统工程理论与实践,2006(9):107-112.
LAN J B,XU Y,HUO L A,et al.Research on the priorities of fuzzy analytical hierarchy process[J]. Systems Engineering-Theory&Practice,2006(9):107-112.(in Chinese)
[11]中华人民共和国.GB/Z 19397—2003工业机器人电磁兼容性试验方法和性能评估准则指南[S].北京:中国标准出版社,2004.
[12]中国国家标准化管理委员会.GB/T 12642—2013工业机器人性能规范及其试验方法:GB/T 12642—2013[S].北京:中国标准出版社,2014.
[13]张维迎.博弈论与信息经济学[M].上海:上海人民出版社,2004.
(责任编辑杨开英)
Performance Evaluation for Search Robots With Wheel-Track Based on AHP-Fuzzy Comprehensive Evaluation and Development of Evaluation Software
ZHAO Jing1,YANG Cong1,HU Weijian2
(1.College of Mechanical Engineering and Applied Electronics Technology,Beijing University of Technology,Beijing 100124,China;2.China Earthquake Emergency Rescue Center,Beijing 100049,China)
Currently,there is no integrated research in evaluation of earthquake search robots in China. Therefore,the evaluation of earthquake search robots is systematically studied in this paper.First,motion patterns of the search robots with wheel-track were introduced,a performance evaluation index system was established for the search robots with wheel-track,and a testing standard for each index was constructed to provide a useful reference for actual tests.Second,due to the multiple levels,multiple factors,and the combination of quantitative and qualitative indices characteristics of the index system,AHP-Fuzzy comprehensive evaluation could be applied to evaluate performance of the search robots with wheel-track.Third,an evaluation system for search robots with wheel-track was proposed based on the performance evaluation index system and AHP-Fuzzy comprehensive evaluation method.Fourth,software was developed according to this evaluation system.This software could manage robotic information,experts蒺information,the evaluation index system and the evaluation index table.Besides,the evaluation results could be calculated by this software based on the scores given by experts and the measured data.Finally,the effectiveness of the evaluation system and software could be proven by an example.Result shows that the comprehensive performance of search robots with wheel-track is middle level.
search robot;analytic hierarchy process(AHP);fuzzy comprehensive evaluation;software
TP 242
A
0254-0037(2016)06-0801-08
10.11936/bjutxb2015060064
2015-06-24
国家科技支撑计划资助项目(2013BAK03B01)
赵京(1961—),男,教授,主要从事机器人运动学和动力学方面的研究,E-mail:zhaojing@bjut.edu.cn
猜你喜欢
今日农业(2022年14期)2022-09-15
纺织标准与质量(2022年1期)2022-07-12
成都信息工程大学学报(2021年5期)2021-12-30
口腔护理用品工业(2021年4期)2021-11-02
逻辑学研究(2021年3期)2021-09-29
纺织科技进展(2021年5期)2021-07-22
家庭影院技术(2019年8期)2019-08-27
读与写·教育教学版(2017年10期)2017-11-10
燕山大学学报(2015年4期)2015-12-25
南都周刊(2015年4期)2015-09-10
