
基于ZigBee技术控制机器人运动监控系统的设计
2016-09-02 09:37李志沈阳工学院
数码世界 2016年7期
李志沈阳工学院
基于ZigBee技术控制机器人运动监控系统的设计
李志
沈阳工学院
本文基于ZigBee技术设计了机器人运动及视频监视系统,PC机做上位机,控制机器人的单片机为下位机,采用多个Zigbee DTK模块构成中继网络解决机器人控制信号的盲区问题,视频监控采用1.3GHz无线视频模块,用网络摄像头和WiFi、3G技术作为机器人图像监控的备份信道。
机器人 ZigBee技术 视频传输
1 系统整体设计
本系统硬件分为上位机和下位机2个部分,共有四个功能模块,监控中心的PC上位机模块,下位机系统模块,视频监控和DTK模块。上位机通过Zigbee模块发送控制机器人的运动指令,下位机控制机器人运动并将传感器采集的信息通过Zigbee模块传送给上位机,下位机上的视频采集模块把机器人周围的环境信息通过视频信道传送给上位机,系统整体功能模块如下图所示。
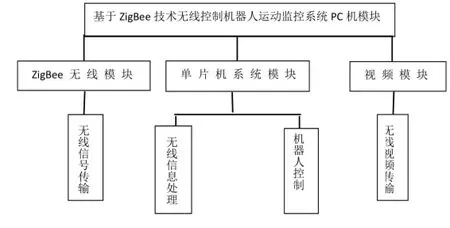
图1 基于ZigBee技术无线控制机器人运动监控系统功能模块图
2 上位机系统
上位机在PC机Windows平台上用VB语言设计控制界面,用视频采集卡接收下位机发送的视频信号,在嵌入视频监控图像的上位机编写下位机(机器人)运动功能键程序,从而实现用功能键对机器人的运动控制。
3 下位机系统
下位机是控制机器人运动的核心,机器人上还安装了无线视频、ZigBee模块。下位机(单片机)编写控制程序和与上位机的通信程序,上位机和下位机之间通过DTK模块传输ASCII码控制信息,在上位机上通过机器人的视频模块观察到小车机器人周围环境,根据观察情况给下位单片机发送机器人运动指令。
4 ZigBee模块
ZigBee是一种无线自组网通信技术,本系统采用的DTK模块工作在2.4GHz段上,具有最高250kbit/s的传输速率,它的传输距离在10-75m的范围内,但可以根据Zigbee模块自组网中继延长通信距离。ZigBee采用了基于循环冗余校验(CRC)的数据包完整性检查功能,应用上可以灵活配置DTK模块参数。机器人一旦收到的控制信息减弱,就可以随时放下一个DTK模块作为中继器来使用,通过设立ZigBee中继模块来提高其传输的距离,在有障碍物的情况下,控制信号传输距离可达2百米以上,从而扩大了机器人的运动范围。
5 运动控制部分
控制机器人运动下位机连接了一个电机驱动模块,分别控制四个电机,四个电机又是两两同向,考虑到布局和操作的方便性,只用了一个驱动电机模块,用于控制左侧两个电机和右侧两个电机,没有对四个电机单独进行控制。前进和后退时,左右两侧的电机同向而行。向左拐弯时,左侧电机需要向后转动,右侧电机需向前转动;向右拐弯时,左右两侧电机需互换转动方向。
6 视频监控模块
本系统的视频监控模块采用了双摄像头、双备份信道的技术来保证监控视频无死角,一个摄像头为机器人无线视频传输模块提供图像采集,支持短距离无线传输,另一个摄像头是网络摄像头,支持WiFi技术和公网的3G技术。
一般情况下以无线视频采集传输模块传输的视频信号作为监控信号,当这种方式受到距离限制或障碍物干扰的情况下,监控系统转为由网络摄像头采集视频信号并通过Wi Fi网络传给上位机,如果Wi Fi的信号也没有,还可以通过插在网络摄像头服务器上3G上网卡通过3G网传输视频信号,通过这样视频监控的备用信道,提高了本系统的距离延展性。
7 系统测试
本系统首先测试了用VB编写的上位机的显示视频监控画面以及控制机器人下位机的功能键,上位机监控画面显示正常,上位机通过界面上的功能键实现了对下位机的运动控制,在有障碍物遮挡的情况下,通过上位机的监控视频和功能键也能实现对机器人的运动控制。
机器人上ZigBee的DTK模块的作为传输控制信息的通信设备,通过ZigBee网克服无线数据传输问题,实现PC上位机和机器人下位机数据采集与控制的双工通信。
李志(1965年出生),男,辽宁省沈阳市人,教授,沈阳工学院信息与控制学院通信工程专业教研室主任。
猜你喜欢
无线互联科技(2021年4期)2021-04-21
小猕猴智力画刊(2019年3期)2019-04-19
电子制作(2018年23期)2018-12-26
科技与创新(2018年1期)2018-12-23
电子制作(2018年19期)2018-11-14
车迷(2018年12期)2018-07-26
中国老区建设(2016年3期)2017-01-15
山东工业技术(2016年15期)2016-12-01
现代工业经济和信息化(2016年2期)2016-05-17
北京纪事(2016年5期)2016-05-07
