量测提升卡尔曼滤波
2016-09-02 08:09胡振涛胡玉梅刘先省
电子学报 2016年5期
胡振涛,胡玉梅,刘先省
(河南大学图像处理与模式识别研究所,河南开封 475004)
量测提升卡尔曼滤波
胡振涛,胡玉梅,刘先省
(河南大学图像处理与模式识别研究所,河南开封 475004)
滤波器设计是系统辨识和状态估计的重要基础.卡尔曼滤波通过状态预测和量测更新的实现框架,在最小方差准则下实现对目标状态的最优估计,但在单传感器量测环境中其滤波精度易受量测噪声随机性的影响.本文提出一种基于量测提升策略的卡尔曼滤波算法实现框架,新方法依据当前时刻量测和量测噪声先验统计信息构建虚拟量测,并通过对虚拟量测采样以及融合提升系统量测信息可靠性,进而改善状态估计精度.同时,针对算法在工程应用中实时性、准确性以及鲁棒性等需求,设计了分布式加权融合和集中式一致性融合的两种实现结构.理论分析和仿真实验结果验证了算法的可行性和有效性.
卡尔曼滤波;量测提升策略;分布式加权融合;集中式一致性融合
1 引言
在自动控制、通讯、故障诊断和图像处理等学科领域,常常会遇到估计问题,所谓估计,是从带有随机干扰的量测数据中,通过有用信息的提取和利用,最大可能逼近被量测系统的真实状态.按照被估计量是否随时间发生变化的性质,估计问题大致分为参数估计和状态估计两大类[1,2].将参数估计的方法与动态随机过程或序列的内部规律性结合起来,就可以得到状态估计.经典的估计方法如最小二乘估计,极大似然估计,极大后验估计和线性最小方差估计等[3,4].基于贝叶斯估计原理的卡尔曼滤波(KF)给出了线性最小方差最优准则的典型实现[5].但获得最小方差的前提是被估计系统严格满足线性、高斯噪声且噪声相互独立的假设,这些条件限制了其在非线性以及噪声有色系统估计中的应用.
近年来,对于KF理论研究关注点主要集中在两方面,第一方面是对其应用条件的放宽,即如何利用KF算法框架解决非线性和噪声相关系统的状态估计问题.对于非线性系统估计的处理,结合局部线性化、UT变换、Stirling 插值技术、三阶容积积分以及随机型采样等方法,国内外一些专家学者相继提出了扩展卡尔曼滤波(EKF)[6]、不敏卡尔曼滤波(UKF)[7,8]、中心差分卡尔曼滤波(CDKF)[9]、容积卡尔曼滤波(CKF)[10,11]、粒子滤波(PF)[12]和集合卡尔曼滤波(EnKF)[13]等及其改进算法,并针对具体对象和背景取得较好的滤波性能.对于有色噪声的噪声解耦问题,主要是利用状态扩维、量测扩维以及模型重构等方法实现噪声的白化处理.第二方面是对卡尔曼滤波过程中精度提升的研究,影响卡尔曼滤波精度的参数主要有两个:(1)系统噪声误差建模,该参数取决于对被估计对象系统状态演化过程的认知;(2)量测传感器误差,该参数越小越好,对于此类问题最简单的解决方式是选取精度较高的传感器,但无疑提高了硬件代价.另外一种常用的解决方式是在多传感器量测环境下利用目前较为流行的多源信息融合技术[4,14],但为了获得满意的滤波效果,需要合理配置传感器数目以及选择有效加权融合方法,缺乏针对应用对象的普适性.针对以上问题,本文提出量测提升卡尔曼滤波算法,算法构建依赖于量测系统建模中先验信息的进一步提取和利用,在不增加硬件代价情况下改善卡尔曼滤波精度.另外,在结构上给出分布式加权融合和一致性加权融合两种实现形式,并对比分析了算法性能.
2 标准卡尔曼滤波
考虑如下一般线性高斯离散随机系统
xk=Fk-1xk-1+Γk-1uk-1
(1)
zk=Hkxk+vk
(2)

(3)
P0|0=P0
(4)
(5)
(6)
(7)
(8)
Pk|k=Pk|k-1+KkHkPk|k-1
(9)
其中,Kk表示k时刻滤波增益阵,用来度量最新量测信息在当前时刻状态估计实现中的利用程度.
3 量测提升卡尔曼滤波
3.1量测提升策略


m=1,2,…,M; i=1,2,…,N
(10)
3.2基于分布式加权融合的量测提升卡尔曼滤波

(11)
(12)

(13)
由式(11)和式(12)知
(14)
(15)
将式(15)代入式(13),求取估计误差协方差
(16)
(17)
(18)

(19)

(20)
依此类推,若有N个不相关的传感器量测参与滤波实现,则

(21)
(22)
(23)
(24)
分布式加权融合量测提升卡尔曼滤波具体实现如下:
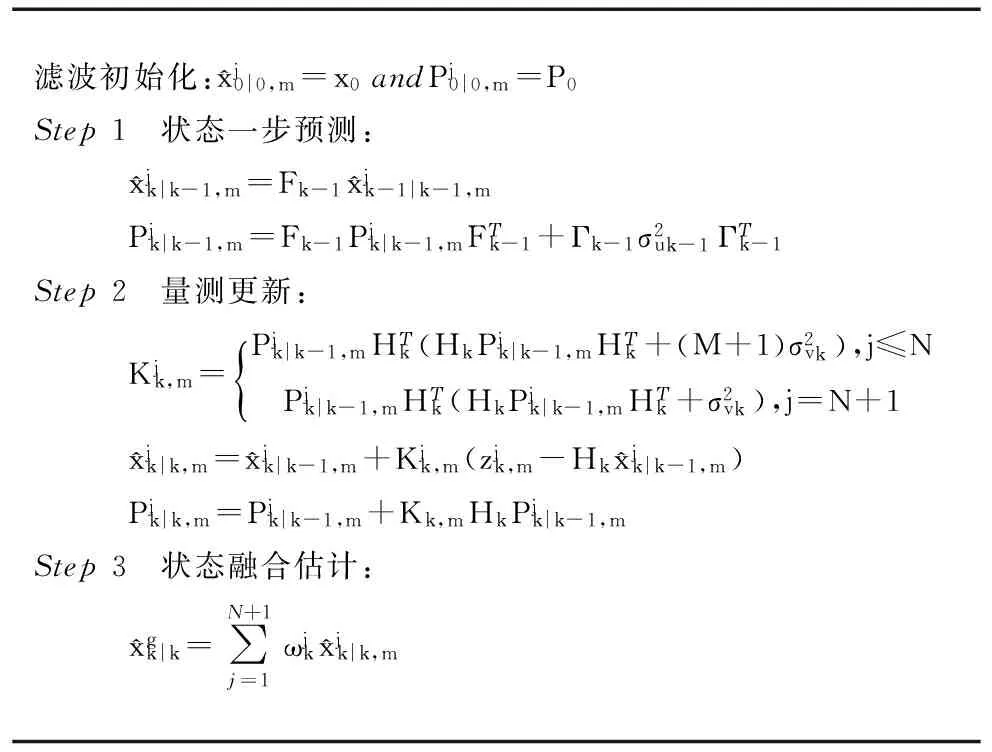
滤波初始化:^xj0|0,m=x0andPj0|0,m=P0Step1 状态一步预测:^xjk|k-1,m=Fk-1^xjk-1|k-1,mPjk|k-1,m=Fk-1Pjk|k-1,mFΤk-1+Γk-1σ2uk-1ΓΤk-1Step2 量测更新:Kjk,m=Pjk|k-1,mHΤk(HkPjk|k-1,mHΤk+(M+1)σ2vk),j≤NPjk|k-1,mHΤk(HkPjk|k-1,mHΤk+σ2vk),j=N+1{^xjk|k,m=^xjk|k-1,m+Kjk,m(zjk,m-Hk^xjk|k-1,m)Pjk|k,m=Pjk|k-1,m+Kk,mHkPjk|k-1,mStep3 状态融合估计:^xgk|k=∑N+1j=1ωjk^xjk|k,m
3.3基于集中式一致性融合的量测提升Kalman滤波
考虑到实际工程环境中,一些外界扰动(传输误差、计算误差、环境噪声和人为干扰等)是无法回避的,使得部分量测噪声出现偏离量测系统建模中噪声统计特性的情况,此时,如果仍然遵循着已知噪声统计特性进行分布式融合,必然将导致滤波精度的下降.在样本数目有限且噪声统计信息不确定情况下,针对虚拟量测的有效融合问题,一个直观的解决方法就是减少虚拟量测融合过程中对于量测噪声统计信息的依赖,并尽可能提取和利用虚拟量测间自身蕴含的冗余和互补信息.基于以上分析,通过构建表征虚拟量测间数据相互支持程度信息的一致性距离和一致性矩阵,合理配置虚拟量测在量测融合过程中的权重,以实现虚拟量测在数据融合过程中的有效利用,在此基础上,设计了基于一致性加权融合量测提升卡尔曼滤波算法(C-KF).
考虑到虚拟量测之间相互支持程度的度量,定义置信距离
j=1,2,…,N+1; ξ=1,2,…,N+1
(25)
(26)
(27)

(28)
其中
(29)
(30)
(31)

(32)
(33)
(34)
依据集中式融合结构形式,C-KF与标准KF实现区别在于需要对式(7)和式(8)进行修正.C-KF算法具体实现如下:
在我国康复治疗技术岗位任务分析的相关研究[6]中,对物理治疗技术岗位工作任务的分析共列举了10项。结果显示:PT岗位需要掌握的前五项任务分别是 PT4、PT5、PT6、PT8、PT9,提示传统康复在老年康复中所占比例较大,老年人更易接受(见表 3)。
4 仿真实验与分析
为验证可行性和有效性,以下给出虚拟量测前提下MonteCarlo仿真算例,取MonteCarlo次数为200,并以均方根误差(RMSE)作为衡量算法精度优劣的性能指标.
算例1无扰动情况下

图1给出N取50时,三种算法在水平方向和竖直方向目标位置估计的RMSE比较.由图1可以直观的看到:D-KF和C-KF的滤波精度均优于标准KF算法,另外,随着虚拟量测数目的增加,系统状态估计精度相应也得到了改善.分析其原因在于,通过量测提升策略的引入,并利用多源信息融合技术实现对于当前量测数据中不确定消除实现滤波估计精度的提升.
图2给出了虚拟量测数目与状态估计RMSE均值之间关系.由图2可以清晰看到虚拟量测数目从3增加30过程中,RMSE均值减小较快.这种现象表明,对于单传感器系统,通过构建虚拟量测,并采用D-KF或C-KF将有效提高系统状态估计精度,进而降低对传感器自身精度的要求,减小传感器的硬件代价.再者,D-KF根据加权最优分配原则对传感器量测和所有虚拟量测进行融合得到系统状态的全局估计,在相同虚拟量测数目的条件下,相对于C-KF,D-KF能够获得更高的状态估计精度.而C-KF通过一致性检验原理对虚拟传感器信息进行融合,随着虚拟量测个数的增多,C-KF的状态估计精度逐渐逼近D-KF.
图3给出了虚拟量测数目与算法耗时的关系.由图3可知,随着虚拟量测个数的增加D-KF和C-KF的计算量均随之增大,但C-KF计算量增加的速度要远大于D-KF.其主要原因是C-KF在求解虚拟量测自身权重并融合的过程中需要进行矩阵求逆运算,伴随虚拟量测数目的增多矩阵维数将成线性增长,从而导致C-KF计算复杂度近似二次函数增长.因此,考虑算法实时性能,虚拟量测的个数不可能无限大.

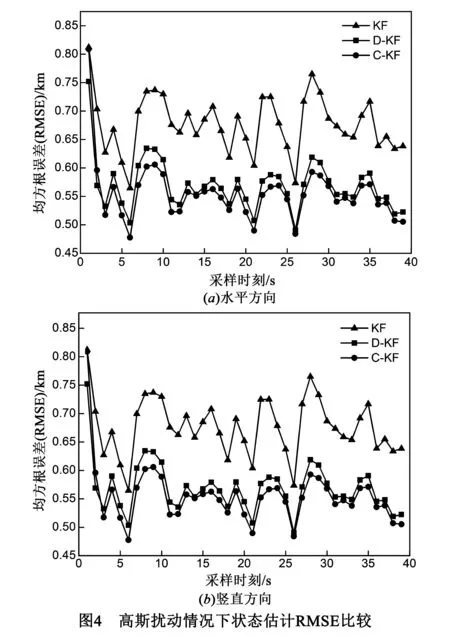
算例2扰动情况下
从图4中可以看出,由于扰动影响,与图1相比系统状态估计RMSE整体均增大,且稳定性变差,且这种影响对于标准KF而言其影响尤其明显.分布式结构固有的容错性使得D-KF相对标准KF具有较好的鲁棒性,但由于分布式融合结构中的子滤波器实现过程需要直接利用量测噪声的先验信息(量测噪声方差),而实际上由于受到扰动信息的影响,先验信息的可靠性已经被破坏,从而限制了此种融合方式提升滤波精度的有效性.不同于D-KF实现机理,C-KF通过对虚拟量测数据之间相互支持程度的度量实现量测融合中权重的评估,避免了对量测先验信息的依赖,从而有效抑制扰动对滤波精度的影响.正是C-KF对于数据的处理机制改善了滤波估计精度,使得在扰动影响情况下,C-KF相对于D-KF取得了更好的滤波效果.为了进一步验证C-KF在抑制扰动对滤波精度影响上的可行性,表1给出在扰动服从泊松分布情况下,不同扰动概率时D-KF算法和C-KF算法的系统状态估计精度.由表中数据可以清晰看出,随着扰动发生概率的增大,D-KF和C-KF算法的RMSE均随之增加,但C-KF的RMSE均值均优于D-KF.

表1 泊松分布扰动不同扰动概率下状态估计的RMSE均值
5 小结
针对单传感器量测噪声随机性对卡尔曼滤波精度的不利影响,在不增加物理传感器数目情况下,通过虚拟量测的设计实现信息融合技术的引入,提出一种基于量测提升策略卡尔曼滤波的实现框架.此外,考虑滤波精度、计算复杂度以及扰动影响等实际因素,在量测提升策略卡尔曼滤波框架下,设计了基于分布式最优融合和基于集中式一致性距离融合的两种实现结构.理论推导和仿真实验分析表明:在滤波精度上,D-KF和C-KF均优于标准KF.如不考虑扰动影响,D-KF滤波精度一般优于C-KF,同时随着虚拟量测数目增加C-KF滤波精度逐渐趋于D-KF,但C-KF中权重计算方式将导致其计算量随着虚拟量测数目增加而急剧增大.如考虑扰动影响,由于C-KF实现机理能够有效抑制扰动影响,使得其滤波精度优于D-KF.因此,在实际应用中可根据可被估计对象的特点以及对系统估计精度和实时性要求,选择适当的量测提升卡尔曼滤波算法的实现形式.
[1]Ristic B,ArulampalamM S,Gordon N.Beyond the Kalman Filter:Particle Filters for Tracking Applications[M].London:Artech House,2004:239-251.
[2]Wang X,Liang Y,Pan Q,et al.Nonlinear Gaussiansmoothers with colored measurement noise[J].IEEE Transactions on Automatic Control,2015,60(3):870-876.
[3]潘泉,梁咏梅.多源信息融合理论及应用[M].北京:清华大学出版社,2013:29-38.
Pan Q,Liang Y M,et al.Multi-Sourse Information Fusion Theory and its Application[M].Beijing:Tsinghua University Press,2013:29-38.(in Chinese)
[4]Bar-Shalom Y,Willett P K,Tian X.Tracking and Data Fusion:a Handbook of Algorithms[M].Storrs:YBS Publishing,2011:56-61.
[5]Simon D.Kalman filtering with state constraints:a survey of linear and nonlinear algorithms[J].IET Control Theory & Applications,2010,4(8):1303-1318.
[6]Khanesar M A,Kayacan E,Teshnehlab M,et al.Extended kalman filter based learning algorithm for type-2 fuzzy logic systems and tts experimental evaluation[J].IEEE Transactions on Industrial Electronics,2012,59(11):4443-4455.
[7]Julier S J,Uhlmann J K.Unscented filtering and nonlinear estimation[J].Proceedings of the IEEE,2004,92(3):401-422.
[8]Gustafsson F,Hendeby G.Some relations between extended and unscented Kalman filters[J].IEEETransactions on Signal Processing,2012,60(2):545-555.
[9]Zhao D M,Bao H,Wang Q B,Gao Z.The second order central divided-difference Kalman filter[A].The Eighth International Conference on Fuzzy Systems and Knowledge Discovery[C].China,IEEE,2011,2637-2640.
[10]Arasaratnam I,Haykin S.CubatureKalman filters[J].IEEE Transactions on Automatic Control,2009,54(6):1254-1269.
[11]Ding Z,Balaji B.Comparison of the unscented and cubature Kalman filters for radar tracking applications[A].IET International Conference on Radar Systems[C].UK,IEEE,2012:1-5.
[12]Cappe O,Godsill S J,Moulines E.An overview of existing methods and recent advances in sequential Monte Carlo[J].Proceedings of the IEEE,2007,95(5):899-924.
[13]Lorentzen R J,Naevdal G.An iterative ensemble Kalman filter[J].IEEE Transactions on Automatic Control,2011,56(8):1990-1995.
[14]韩崇昭,朱红艳,段战胜.多源信息融合[M].北京:清华大学出版社,2010.55-66.
Han C Z,Zhu H Y,Duan Z S.Multi-Source Information Fusion[M].Beijing:Tsinghua University Press,2010:55-66.(in Chinese)
[15]潘泉,王增福,梁彦,等.信息融合理论的基本方法与进展(Ⅱ)[J].控制理论与应用,2012,29(10):1234-1244.
Pan Q,Wang Z F,Liang Y,et al.Basic methods and progress of information fusion(Ⅱ)[J].Control Theory & Applications,2012,29(10):1234-1244.(in Chinese)

胡振涛男,1979年6月出生于河南永城市,现为河南大学计算机与信息工程学院副教授,硕士生导师.主要研究方向为复杂系统建模与估计,非线性滤波.
E-mail:hzt@henu.edu.cn
胡玉梅女,1990年10月出生于河南永城市,现为河南大学计算机与信息工程学院研究生.主要研究方向为复杂系统建模与估计,非线性滤波.
E-mail:hym-henu@163.com

刘先省男,1964年9月出生于河南潢川县,现为河南大学计算机与信息工程学院教授,博士生导师.主要研究方向为多源信息融合,传感器管理.
E-mail:liuxianxing@henu.edu.cn
Kalman Filter Based on Measurement Lifting Strategy
HU Zhen-tao,HU Yu-mei,LIU Xian-xing
(InstituteofImageProcessingandPatternRecognition,HenanUniversity,Kaifeng,Henan475004,China)
Filter design is the signification foundation for system identification and state estimation.Based on the realization construction of state prediction and measurement update,Kalman filter can obtain the optimal estimation of state estimated under the linear minimum variance criterion,but the filtering precision is vulnerable to the random characteristics in single sensor condition.A novel realization structure of Kalman filter based on measurement lifting strategy is proposed in the paper.At first,virtual measurement is constructed on the basis of latest measurement and the prior statistical information of measurement noise modeling.Then,virtual measurements are reasonably sampled and fusion to modify the measurement reliability,and the estimation precision is improved.In addition,aiming to the algorithm requirements including real-time,precise and robustness in engineering application,the distributed weight fusion structure and the centralized consistency fusion are designed respectively.Finally,the theoretical analysis and experimental results show the feasibility and efficiency of algorithm proposed.
Kalman filter;measurement lifting strategy;distributed weight fusion;centralized consistency fusion
2014-10-20;
2015-05-18;责任编辑:马兰英
国家自然科学基金(No.61300214);中国博士后科学基金(No.2014M551999);河南省高校科技创新团队支持计划(No.13IRTSTHN021);河南省基础与前沿技术研究计划(No.132300410148);河南省博士后科学基金(No.2013029);河南省高校青年骨干教师资助计划(No.2013GGJS-026);河南大学优秀青年培育基金(No.0000A40366)
TP391
A
0372-2112 (2016)05-1149-07
电子学报URL:http://www.ejournal.org.cn10.3969/j.issn.0372-2112.2016.05.019
猜你喜欢
数学物理学报(2022年4期)2022-08-22
北京航空航天大学学报(2021年7期)2021-08-13
数学物理学报(2019年4期)2019-10-10
电子制作(2019年23期)2019-02-23
北京航空航天大学学报(2017年9期)2017-12-18
贵州师范学院学报(2016年3期)2016-12-01
电测与仪表(2016年21期)2016-04-11
电源技术(2016年9期)2016-02-27
海军航空大学学报(2015年1期)2015-11-11
空间控制技术与应用(2015年3期)2015-06-05