多吸盘框架式爬壁机器人系统的设计与分析
2016-08-26 09:02崔登祺李方兴高学山DONGHanCUIDengqiLIFangxingGAOXueshan北京理工大学机电学院北京100081
制造业自动化 2016年6期
董 寒,崔登祺,李方兴,高学山DONG Han, CUI Deng-qi, LI Fang-xing, GAO Xue-shan(北京理工大学 机电学院,北京 100081)
多吸盘框架式爬壁机器人系统的设计与分析
董寒,崔登祺,李方兴,高学山
DONG Han,CUI Deng-qi,LI Fang-xing,GAO Xue-shan
(北京理工大学 机电学院,北京 100081)
为实现在非磁性壁面上的检测与修护工作,同时满足高效、无损、自动化的要求,设计一种框架式爬壁机器人。根据壁面特征及爬行要求,确定机器人的机械结构和电气系统构成,采用电机与气动结合的驱动方式。对关键元件吸盘进行密封处理,分析机器人的吸附稳定性,机器人的运动控制策略及机器人在吸盘切换时的策略选取。
爬壁机器人;密封处理;吸附稳定性;运动规划;吸附切换
0 引言
爬壁机器人从吸附方式上分为真空吸附、磁吸附、推力吸附等[1]。对于非磁性表面,真空吸附是一种比较理想的方式。爬壁机器人从运动方式上主要分为车轮式、履带式、多足步行式和框架式四种[2,3]。壁面检测常需要搭载雷达检测仪等设备进行无损检测,需保证其平稳运动,框架结构是一种比较平稳的结构。同时,为了获取更大的吸附力,常采用多吸盘结构,增大机器人与壁面的接触面积[4,5]。为适应在非磁性壁面上的检测工作,设计一种多吸盘框架式爬壁机器人,采取真空吸附方式。
本文的组织结构如下:1)介绍爬壁机器人系统核心部分——机器人本体的机械结构及控制系统的基本构成;2)对机器人结构的吸附稳定性进行分析;3)对机器人的吸附及运动策略进行分析;4)对机器人的实际运动效果进行实验验证。
1 机器人本体的结构
如图1和图2所示,机器人总体呈“十字”框架式结构,包括两个正交的总体移动关节、四个可伸缩的末端移动关节及对应的吸盘组末端执行部分。机器人在壁面上的移动包含X轴和Y轴两个方向,互相垂直,互不干涉,机器人本体是一个真空吸附式直角坐标机器人。机器人在水平和垂直方向上运动的实现靠两个直流伺服电机驱动,并带动与中间支撑架固联的同步带实现吸盘组与支撑台相对位置的移动。吸盘组与壁面垂直距离的改变由推杆式直线电机实现,吸盘对壁面的吸引与释放由真空泵和单向电磁阀实现。中心支撑架内外分别有两对直线轴承引导两组直线导轨在其中运动。X轴与Y轴方向上的两个吸盘组与壁面吸附是同步完成的,在其中一个轴向上吸附时,由于吸盘的柔性,与其正交方向上的两个吸盘组相对于中心支撑架会发生偏斜,故同步伸缩的两个推杆直线电机的两侧分别安装了万向支撑轮,防止吸盘组过度倾斜,同时使吸盘组上的距离传感器能够有效检测到与壁面之间的距离信息。
为应对壁面上出现少量细小坑洼这种情况下的吸取,调研满足质量轻、强度大、柔性大的密封材料,将两种液体硅胶原料按照一定的配比混合后做成与吸盘内表面相符的形状,粘贴在吸盘内表面,如图3所示在真空泵抽气时,硅胶密封垫能将墙面凸起和凹陷的部分充分的包覆,有效改善粗糙表面的吸附效果[6]。如图4所示,实验证明经密封处理后能在比较粗糙的砖面上承受超过10kg的拉力,超过单个吸盘在光滑表面产生吸附力的80%。

图2 机器人的正视图和俯视图
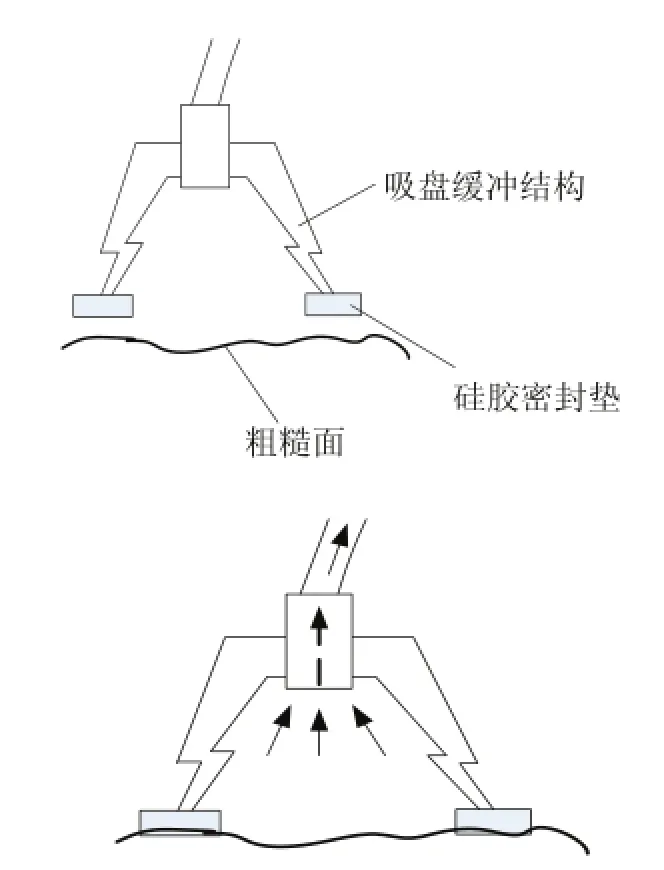
图3 吸盘的柔性处理示意图

图4 柔性处理后的吸盘吸附试验图
由于爬壁机器人工作环境的特殊性,要求控制系统具有可靠性高、抗干扰能力强、易于功能扩展等特点[7]。控制系统由机器人本体控制系统、地面监控系统两部分组成。系统工作时,地面监控系统完成机器人的任务下达及状态显示功能,操作人员通过人机接口输入控制指令,基于无线网络传输至机器人本体控制系统,机器人在本体控制器的控制下完成吸附、爬行、越障等动作。机器人本体带有雷达等检测设备对壁面情况进行检测,并将检测数据及自身状态信息实时传回地面监控系统。
机器人本体系统以嵌入式主机作为核心控制器,实现电气控制及气动伺服控制功能。根据模块化设计的原则,硬件电路的主控芯片选用ARM系列stm32f103vet6;电机的运行通过CAN总线实现微控制器与伺服驱动器之间的通信,通过伺服驱动器可以对电机实现速度与位置控制;遥控器与主控制器之间的通信靠2.4G无线收发模块来实现,避免与检测设备的频率发生干扰;推杆式直线电机行程信息由距离传感器来读取;推杆式直线电机和电磁阀的控制通过I/O口输出给对应的继电器模块带动相应的执行器件来实现;机器人状态信息的给出也是通过通用I/O口发送出去,显示机器人本体的运动状态及接收到的运动控制指令。机器人控制系统的总体构成如图5所示。

图5 机器人的控制及执行部分
2 机器人的吸附可靠性分析
机器人在工作时主要有以下三种情况:1)X轴方向的吸盘组抬起,Y轴方向的洗盘组吸附;2)Y轴方向的吸盘组抬起,X轴方向的吸盘组吸附;3)吸盘交替吸附时,X轴和Y轴方向上的两组吸盘同时吸附。即机器人工作时至少有一个方向上的两组吸盘,共6只同时吸附在壁面上[8,9]。而机器人的工作环境又主要分为与地面平行和与地面垂直的壁面两种情况。其中,当壁面与地面垂直是最恶劣的情况,予以重点讨论。
当Y轴方向上的吸盘组抬起,X轴方向上的吸盘组吸附的时候,会因Y轴方向上的吸盘组及中心支撑架相对于X轴方向上的直线导轨运动,机器人本体上的应力分布也会有所不同。下面分析当支撑架运动到导轨末端时的情况,如图6所示。

图6 Y轴吸附,X轴抬起
图6中GY表示Y轴部分的重力,GX表示X轴部分的重力,Fi表示第i个吸盘的吸附力,Ni表示壁面对吸盘产生的正压力,fi表示壁面与第i个吸盘与壁面之间的摩擦力,LX表示X轴两吸盘组之间的距离,L表示X轴方向一个吸盘组的纵向间距,SX表示X轴方向上的行程,H表示机器人重心到壁面的距离,h表示X轴方向上的导轨重心到壁面的距离。假定墙面处在Z轴方向,若要使机器人保持平衡,则应满足如下方程组:

其中:
μ表示滑动摩擦系数;fh表示滑动摩擦力;
fs表示最大静摩擦力。

为避免机器人倾覆,应当满足Ni>0,以Y轴方向上的吸盘组中的吸盘5和吸盘6中心的连线为参考线,可以得到扭矩平衡方程:

以Y轴方向上的吸盘组中的吸盘1和吸盘2中心的连线为参考线,可以得到扭矩平衡方程:

为了便于分析,假定壁面施加到X轴方向上的每个吸盘组上三个吸盘的力是相同的,得到如下方程组:
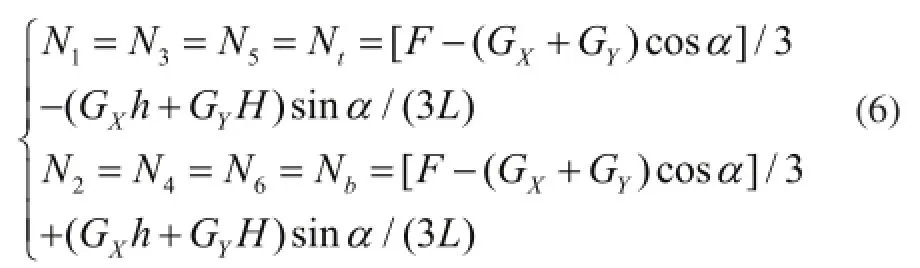
其中,Nt表示壁面对离中心支撑架比较近的一组吸盘产生的反作用力,Nb表示壁面对离中心支撑架比较远的一组吸盘产生的作用力。由Ni>0可以得到:

由图6可知,右侧吸盘组的集合中心位置位于右侧参考线上,根据扭矩平衡可以得到方程。
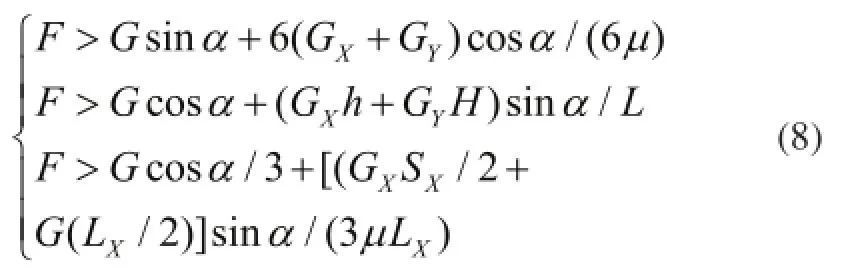
类似的,当X轴上的吸盘组被抬起,Y轴上的吸盘组吸附时,可以得到如下约束方程:

其中,LY表示Y轴上的吸盘组两端的间距,SY表示Y轴方向上的行程,其余各变量与上述情况下的含义相同。

图7 机器人控制系统总体框图
原理样机中各变量的具体尺寸如下:
LY=8 5 0 m m,SY=7 0 0 m m,LX=8 0 0 m m,SX=700mm,L=100mm,吸盘的半径r=77mm,H=300mm,h=220mm,GX=160N,GY=120N。
将各变量的值代入方程和后,都能满足稳定吸附的条件。
3 机器人的吸附及运动控制策略
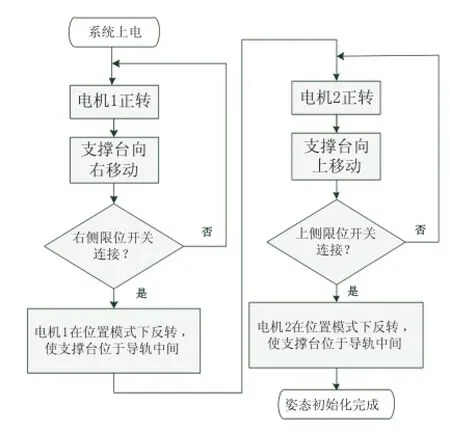
图8 机器人位姿初始化流程图
控制系统运行的数据流如所示。为保证后续的运动控制稳定性,当系统上电后,机器人首先完成姿态的初始化,使机器人处于一个“正十字”状态。如图9所示,无论机器人置于壁面上的初始状态如何,都要使水平方向的电机运行在速度模式下到达右端,当位置开关检测到支撑架到达右极限位置时,电机工作在位置模式下,支撑架以平稳的速度回到导轨的水平中间位置。此后,在垂直方向上电机也按照类似规律运行,使支撑架在垂直位置上到达导轨的中心,姿态初始化完成。
机器人搭载设备执行具体的作业任务需要经过的位置由地面工作人员通过2.4G无限遥控器发出,该频率能够有效避免与雷达监测系统之间产生信号干涉。串口指令集的格式为:起始符,指令字节数(包括起止符),指令代号,指令具体内容,结束符。地面工作人员通过遥控器发送的命令主要包括沿各个方向的运动、临时停止命令、重新启动命令等。
为使机器人在运动的时候吸盘能够稳定的吸附在壁面上,必须对吸盘的吸附性能进行分析。当中心支撑架到达某导轨上的极限位置需要对吸盘组是吸附还是抬起进行切换的时候,采取何种切换策略对吸附的成败起着关键的作用。吸附切换策略主要分为两种:直接切换和有过渡过程的切换[3]。直接切换方式在一组吸盘脱离的同时,另一组吸盘开始吸附,这样的优点是操作简便,缺点是在切换时可能会出现总气压下降过多有吸附失效的风险,如图10所示,纵轴的高位表示吸附状态,低位表示释放状态。如图11所示为带有过渡过程的切换方式,在一组吸盘释放前,另一组吸盘就已经处于吸附状态,之后需要抬起的吸盘组对应的单向电磁阀才将气路关闭,保证了吸附的可靠性,但导致机器人的运动节奏变慢。

图9 机器人位姿初始化示意图
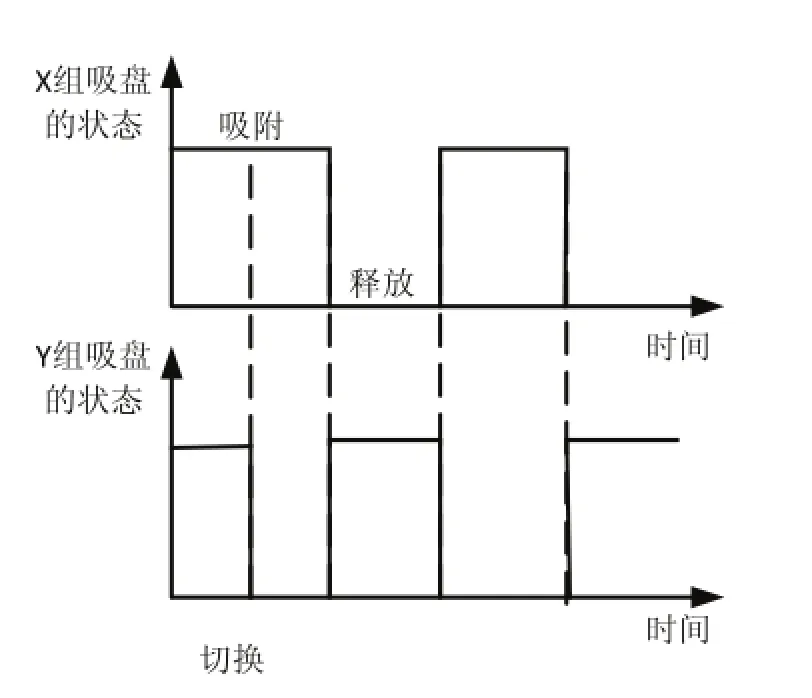
图10 直接切换方式
采用相同的平台对两种切换策略下的吸附情况进行实验,采用气压计收集两组吸盘周围的气压情况。如图12所示,在直接切换方式下,当不同的两组吸盘同时释放与吸附的时候,两组吸盘内的气压平稳的上升与下降,但总气压在一段较短的时间内会出现先下降,当触底后又上升,最后恢复到切换前稳定的状态,少量的气压下降是由缓慢的漏气导致的。带有过渡过程的切换方式如图13所示,在前半段,两组吸盘内的总气压也出现了一个下降的过程,但之后迅速升高,最后到达一个稳定值,这个稳定值要大于直接切换时两组吸盘内气压的总和。为更加保证吸附的稳定性,原理样机采用的是带有过渡过程的吸附切换策略。
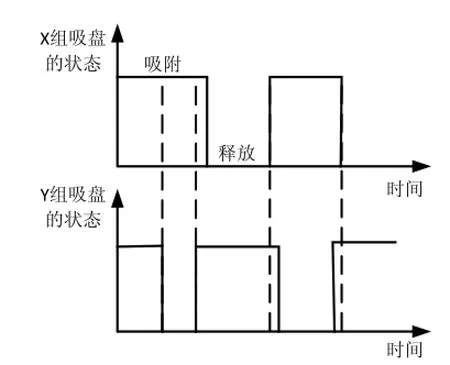
图11 带有过渡过程的切换方式
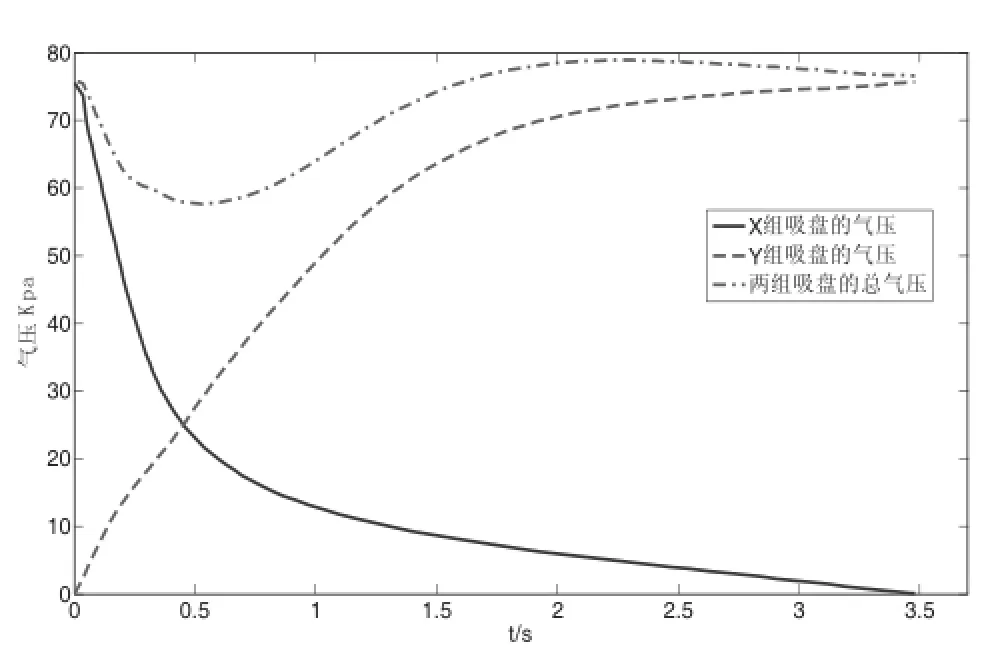
图12 直接切换方式下的气压变化
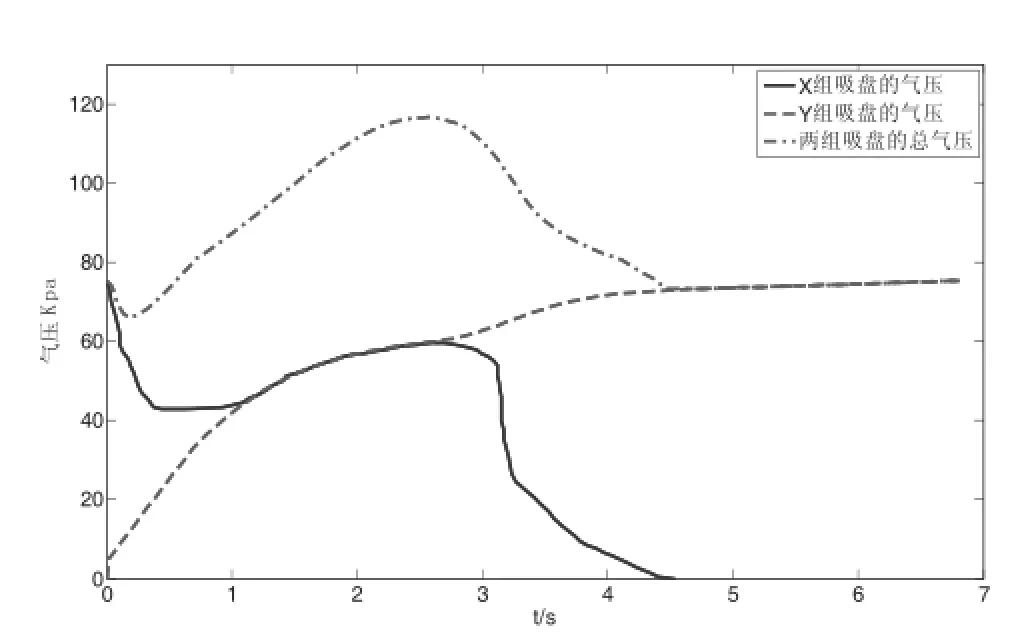
图13 带有过渡过程的气压变化
【】【】
4 原理样机实验
为验证原理样机的运动性能、搭载负载能力及吸附稳定性和吸盘切换策略的可靠性,在并不光滑的壁面上进行试验。试验表明机器人样机能够搭载3kg的负载完成预定的运动指令,吸盘的吸附效果良好,吸盘的密封增强策略切实可行,在进行吸附切换时稳定可靠。图14为机器人在水平方向上的运动,图15为机器人在垂直方向上的运动。

图14 水平方向上的运动
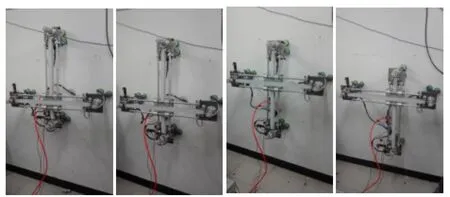
图15 垂直方向上的运动
5 结论
根据在非磁性壁面上的吸附要求,提出一种多吸盘“十字”框架式爬壁机器人设计方案。针对真空吸附式爬壁机器人吸附的关键问题——密封提出了一种柔性密封增强方案。机器人的吸附可靠性进行了理论分析。在吸盘的切换策略上对比了直接切换和带有过渡过程的切换方案,并通过试验证明了后者在可靠性上的优势。最后通过实际的原理样机实验证明了设计方案是可行的。
[1] 付宜利,李志海.爬壁机器人的研究进展[J].机械设计,2008,25(4):1-5.
[2] GAO X,KIKUCHI K.Study on a kind of wall cleaning robot;proceedings of the Robotics and Biomimetics[A].2004 ROBIO 2004 IEEE International Conference on,F,2004[C].IEEE.
[3] 吕鑫,王从庆.一种爬壁机器人的吸附机构分析和设计[J].液压与气动,2012,(9):46-49.
[4] 郭钟华.接触式真空吸取技术研究现状与发展趋势[J].真空,2015,52(2):14-7.
[5] 韩建海,章琛.真空吸盘的设计及应用[J].机床与液压,1992,(3): 143-146.
[6] HUSTON D,BURNS D,GARDNER-MORSE J,et al. Dualdurometer soft suction foot robot for concrete inspection;proceedings of the SPIE Smart Structures and Materials+ Nondestructive Evaluation and Health Monitoring,F,2014[A]. International Society for Optics and Photonics[C].
[7] GIMENEZ A,ABDERRAHIM M,PADRON V,et al.Adaptive control strategy of climbing robot for inspection applications in construction industry[A].proceedings of the Proc of the 15th Triennial World Congress of the IFAC,F,[C].2002.
[8] CUI D,CHEN D. Design and analysis of climbing robot based on Construction Surface Inspection[M].28th Chinese Control andDecision Conference (2016 CCDC).Yinchuan,China.
[9] ZHAO Jing,YAO Xuebin,ZHANG Kailiang,ZHANG Lei. Sudden change of joint velocity during faulttolerant operations for coordinating redundant manipulators[J].Chinese Journal of Mechanical Engineering,2006,42(1):69-74.
Design and analysis on a wall-climbing robot with frame body and suction discs
TP242
A
1009-0134(2016)06-0059-06
2016-03-28
中国铁道科学院基础设施检测研究所重点项目(2014YJ054)
董寒(1991 -),男,山东人,硕士研究生,研究方向为机器人技术。
猜你喜欢
北京航空航天大学学报(2022年7期)2022-08-06
橡塑技术与装备(2022年1期)2022-01-20
幼儿画刊(2021年5期)2021-12-02
建材发展导向(2021年14期)2021-08-23
装备制造技术(2020年12期)2020-05-22
模具制造(2019年4期)2019-06-24
北京航空航天大学学报(2016年6期)2016-11-16
浙江大学学报(工学版)(2016年11期)2016-06-05
科技创新导报(2016年9期)2016-05-14
浙江大学学报(工学版)(2015年7期)2015-03-01