
创新型轮椅的设计
2016-08-23 03:47:55马东宁宋凤玲吴兆才
现代制造技术与装备 2016年1期
马东宁 吕 亮 宋凤玲 吴兆才
创新型轮椅的设计
马东宁 吕 亮 宋凤玲 吴兆才
(滨州市滨州学院,滨州 256600)
本文阐述了该轮椅的结构与工作原理,并运用SolidWorks软件对其进行建模、虚拟装配,并进行功率匹配研究。实践证明,该创新型轮椅功能完善、移动灵活、操作简便、安全度与舒适度高,具有一定的应用前景。
创新型轮椅 坐姿 站姿 结构改进 功能完善
引言
随着信息时代的到来,人们的生活水平不断提高,社会文明也不断进步,关怀残疾人、保护残疾人的呼声越来越高。根据联合国的精确统计,随着近几年残疾人口数量的骤增,残疾人口已占世界总人口数的10%,即全球每十个人中就有一个残疾人。同时,我国第二次全国残疾人口抽样调查的结果显示,全国现有5个类型的残疾人共8296万人,占全国总人口的6.34%。其中,肢体残疾2412万人,所占比重居各类残疾的第一位[1]。此外,随着21世纪的到来,我国人口老龄化进程也随之加快,给社会及家庭带来的压力也不断增大[2]。由于残疾人和老年人的比例加重,数量上升,因此,社会对助行器的需求量也不断增多。助行器是辅助下肢功能障碍的残疾人和老年人站立与行走的工具与设备,起支撑体重、保持身体平衡的作用,在肢残者的生活中扮演着重要角色[3]。轮椅是现在大多数年老体弱者及肢体伤残人士使用较为广泛的助行工具。
随着科技的不断发展,轮椅由最初的手动轮椅逐渐发展为电动轮椅,直到现在越来越受到重视的智能轮椅。虽然轮椅的发展随着社会的需求变得多种多样,但现在国内外市场上的轮椅产品依旧以手动轮椅和电动轮椅为主。由于电动轮椅成本较高,现阶段还未能普及使用,对技术的研究与产品的系统性设计还有待发展;而目前,对手动轮椅的使用比较广泛,但却存在很多问题,如产品质量水平低下、安全性不高、缺乏人性化关怀等[4],不能全面满足使用者的需求,没有顾及使用者的审美要求和精神感受,还存在较大的设计空间。人性化系统设计者应充分考虑行动不便者的需求,从细微处出发,设计安全、舒适、合理的智能轮椅,如增加轮椅可以上升的功能,以便使用者和正常人对话;选择透气性好的座垫;使轮椅操作方式尽可能简单等。针对现有技术缺陷,设计一种多功能创新型轮椅,其不仅具有前进、后退、转弯、升降、原地旋转的功能,还能实现坐姿和站姿的变化。该轮椅不但方便了使用者,而且节约了人力,大大提高老年人和残疾人的日常生活和工作质量,使他们重新获得生活自理能力,具有广阔的发展空间。
1 总体方案设计
首先,设计轮椅整体的支撑机构,在保证整体机构安全与稳定的前提下,构思如何实现轮椅前进、后退、转弯、升降、原地旋转以及实现坐姿和站姿变化的运动功能;其次,考虑如何让使用者在简单方便的操作下控制轮椅;最后,为进一步提高轮椅的安全性与舒适性,设计相应机构。
根据总体方案的设计要求,得出系统的主要组成部分:支撑机构、运动机构、操作机构和保护机构。
轮椅主要机构及布局如图1所示。

图1 整体机构简图
2 三维模型建立
首先构想轮椅整体结构,然后由整体到局部逐步完善。具体设计如下。
第一,绘制大体支架,包括座椅、侧架、后支架、底撑以及车轮轴,实现轮椅的支撑功能。其中,座椅应由头枕、底座和靠背组成。
第二,利用减速电机原理以及推杆电机原理绘制运动装置,运动装置包括前轮、球形万向轮、后支架(内置推杆电机),利用前进电机实现运动装置的前后移动和原地旋转功能;利用推杆电机的工作原理控制轮椅升降功能,实现人体坐姿和站姿的变化。
第三,绘制操作装置,实现对轮椅的操作功能。
第四,为提高轮椅安全度绘制必要的安全设施。
整体结构图如图2所示。

图2 轮椅与人整体模型
2.1 整体支撑机构
轮椅的支撑结构起到支撑人体的作用,故而需要良好的稳定性。该轮椅的支撑机构包括转动连接的底座和靠背、位于靠背前方的前支架和位于靠背后方的后支架。其中,前支架包括两根侧架,每个侧架的底端均设有一个前轮;底座的下方设有底撑,底撑用于支撑底座,当使用者改变在轮椅上的姿势时,底撑可随着底座移动。该机构利用了三角形稳定性原理,提高了整体稳定性,支撑机构如图3所示。

图3 支撑机构
2.2 运动机构
针对现有技术的缺陷,创新型轮椅在实现前进、后退、转弯等行驶功能的同时,还可以实现坐姿和站姿的变化。
2.2.1 行驶机构
轮椅前轮连接有驱动其转动的前进电机,前进电机正转,轮椅前进,前进电机反转,轮椅后退,当两个前轮形成差速时,实现轮椅的转向及原地旋转功能,行驶机构如图4所示。

图4 行驶机构
2.2.2 坐姿与站姿的转换机构
轮椅后支架包括相互铰连接的上半段和下半段,上半段固定在靠背后,下半段的底部连接有球形万向轮。其中,后支架的下半段内部设有推杆和推杆电机,推杆在推杆电机的作用下改变后支架的下半段与底座之间的角度,从而改变高度,实现人体坐姿与站姿的转换,方便使用者高处取物或和他人交流,坐姿与站姿的转换机构如图5所示。

图5 坐姿与站姿的转换机构
2.3 操作机构
为了方便操作,轮椅每个侧架上均设有操作杆和按钮,操作杆内设有导线,与前进电机电性连接,按钮内设有导线,分别与前进电机、推杆电机电性连接,使用者通过操作杆和按钮,控制轮椅的工作状态,操作机构如图6所示。
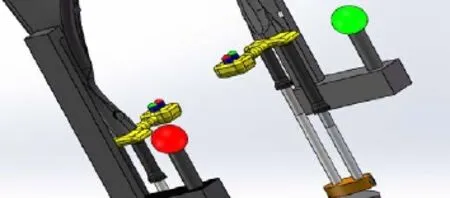
图6 操作机构
2.4 保护机构
保护机构是设计中不可缺少的一部分。前支架的上方设有头枕,头枕的形状与人体头部相适应,供使用者依靠,提高使用者的舒适度;轮椅两根侧架之间设有安全带,安全带可以避免轮椅升高时人脱离轮椅,提高轮椅安全度;每根侧架分为铰连接的上下两段,下半段的侧架上均套设有一个减震弹簧,减震弹簧可以减少轮椅运动过程中的震动;两个前车轮之间设有车轮轴,车轮轴上设有脚踏和脚踏带,保护机构如图7所示。

图7 保护机构
3 计算分析
创新型轮椅最常用的运动形式为平地形式、实现人体坐姿和站姿转换两种形式。根据不同的运动情形,在采用一定理想状态假设的前提下,分别计算驱动电机所需的功率[5]。根据具体设计情况及设计要求确定创新型轮椅的具体参数如下:
轮椅总重量:≤55kg;
载荷:≤75kg;
平坦路面轮椅最大行走速度:Vmax=3m/s;
实现人体坐姿和站姿转换时的最大速度:Vmax=0.4m/s最大夹角角度为30°。
3.1 行走功率计算
行驶时,轮子为纯滚动,则F=µN,其中,µ为轮子与地面之间的滚动摩擦系数,查手册得µ=0.05。在水平路面上行走时所需的总功率如式(1)所示。
由于装有两个前进电机,因此,每个前进电机为100W即可满足要求。
3.2 推动功率计算
实现人体坐姿和站姿转换时,推杆电机需要克服轮子与地面之间的滚动摩擦力与载荷的重力。同时,推杆在推杆电机的作用下改变后支架的下半段与底座之间的角度,角度最大时需要的功率最大,具体计算如式(2)所示。
由于实现此功能时仅有推杆电机做功,所以,电机需260W。
3.3 电源选择
为满足创新型轮椅的使用要求,本设计必须实现自主供电,所以决定采用电池作为车载电源。电池的种类根据使用次数不同大致可以分为一次电池与二次电池两类。其中,把仅可使用一次而不可以再补充电量的电池称为一次电池;把可以再充电补充电量往复使用的电池称为二次电池。由于爬楼梯电动轮椅电池要往复使用,故本次设计采用二次电池,而二次电池的种类也相当多,其中,包括镍锡电池、镍氢电池、锂离子电池等[6]。
考虑到电池容量、电压大小、使用寿命等因素,本次设计采用锂电池,选用型号ML-002的锂电池。其主要参数为:
电池容量:10000(mAh);
额定电压:36V;
工作电压范围:28V~42V;
额定工作电流:10A;最大工作电流:30A;充电电流:2.5A;
工作温度:-20℃~55℃。
4 结论
本文在深入研究常用轮椅机理的前提下,仔细分析现有轮椅的优点以及不足,通过借鉴前人设计的经验,提出一种多功能创新型轮椅。文中对创新型轮椅的机构、结构等进行详细设计,运用三维设计软件SolidWorks对爬楼梯电动轮椅进行实体建模,将创新型轮椅分为支撑机构、运动机构、操作机构、保护机构等几部分,并对动力系统进行计算分析和动力匹配。本文所述的多功能创新型轮椅安全度高、使用者舒适度高,通过按钮和操作杆控制轮椅的工作,简单方便,有较大经济价值和社会效益,对智能轮椅的设计具有一定借鉴意义。
[1]光明日报.2006年第二次全国残疾人抽样调查主要数据公报 [EB/OL].(2006-12-02)[2015-12-10].http://www.gmw. cn/01gmrb/2006-12/02/content_516167.htm.
[2]黄毅,佟晓光.中国人口老龄化现状分析[J].中国老年学杂志,2012,(11).
[3]胡玲.残疾人助行器的设计与研究[D].武汉:湖北工业大学,2010.
[4]关浩,崔亚菲,刘国华,等.新型多功能助行器设计[J].大连大学学报,2008,(6).
[5]孟祥雨.一种星轮式爬楼梯电动轮椅设计与研究[D].长春:长春工业大学,2012.
[6]赵海.电动代步车驱动控制系统的研究与开发[D].重庆:重庆大学,2007.
The Design of Innovative Wheelchair
MA Dongning,LV Liang,SONG Fengling,WU Zhaocai
(College of Electrical Engineering, Binzhou University,Binzhou 256600)
This paper describes the structure and working principle of the wheelchair and uses Solid Works software for modeling, virtual assembly and the study of power matching. Practice proves that this new type of innovative wheelchair is fully functional, mobile and flexible, easy to operate with high degree of safety and comfort and it has a certain application prospect.
innovative wheelchair,sitting posture,standing posture,structure improvement,function perfection
国家级大学生创新创业训练计划项目(201410449014)。
猜你喜欢
小天使·一年级语数英综合(2020年9期)2020-12-16 02:57:03
数学小灵通·3-4年级(2020年3期)2020-06-24 05:50:52
新世纪智能(高一语文)(2019年10期)2020-01-13 05:13:44
电子制作(2019年10期)2019-06-17 11:44:54
电子制作(2018年19期)2018-11-14 02:36:50
设备管理与维修(2018年15期)2018-11-08 06:14:50
设备管理与维修(2018年8期)2018-08-13 12:09:14
天津诗人(2017年2期)2017-11-29 01:24:24
中国核电(2017年1期)2017-05-17 06:10:00
爆笑show(2015年5期)2015-07-09 02:02:32
