
海洋水下战场态势仿真系统的设计与实现*
2016-08-18 08:49王庆裕高大远
指挥控制与仿真 2016年4期
李 卓,王庆裕,高大远
(1.海军潜艇学院,山东 青岛 266199;2.海军92995部队训练部,山东 青岛 266100)
海洋水下战场态势仿真系统的设计与实现*
李卓1,2,王庆裕2,高大远1
(1.海军潜艇学院,山东 青岛266199;2.海军92995部队训练部,山东 青岛266100)
在作战仿真领域,由于水下战场环境的特殊性以及水下作战对抗的复杂性,构建具有水下战场实景态势展现以及水下作战对抗演示分析等功能的仿真系统始终是一个难点问题。基于现代海战条件下水下对抗的应用背景,设计实现了海洋水下战场态势仿真系统,给出系统的功能结构、功能流程以及数据处理流程和方案,并对系统的开发部署进行了具体实现,应用情况表明系统能够实现对水下战场实景态势的高精度仿真,可作为海洋水下战场实景态势的演示分析研究平台和水下作战对抗的论证评估工具。
水下战场;实景态势;仿真系统;开发部署;设计实现
近年来,水下作战在信息化海战中的地位逐渐凸显,海洋水下战场空间特殊的军事价值和战略意义已经被广泛认可,各海洋军事强国纷纷推动和实施与海洋水下作战相关的战略和计划,不断加强对水下战场空间的控制,并基于不同的使命任务体系论证了多种水下作战模式,发展了大量的水下武器装备[1-2]。其中美国相继通过“SeaWeb”、“PlusNet”等计划和项目,针对水下远距离探测和预警、水下通信和组网等水下信息技术进行研究和验证。另外,早在冷战时期,美俄就在大洋海底建立了防范对方潜艇的海底反潜网络,近年来更是进一步发展了多种样式的海洋水下对抗系统和对抗节点,包括美国的先进可布放系统(Advanced Deploymental System,ADS)、水下持续监视网(Persistent Littoral Underwater Surveillance Network,PLUSnet)、可部署自主分布式系统(Deployable Autonomous Distributed System,DADS)等,俄罗斯最新研制了固定式被动水声观测系统——“德涅斯特尔”系统,并将其部署海军,这些海底观测网都可直接用于军事对抗。在水下节点的研究方面,相关研究进展也非常快,包括美国的先进无人搜索系统AUSS和Remus-6000型水下航行器,英国的海洋调查与监视水下航行器AutoSub,德国的无人水下侦察航行器DeepC等,这些节点均可作为水下各类活动的手段和载体。鉴于水下战场具有迥异于其它战场空间的复杂性和特殊性,同时还涉及来自不同战场空间的多种作战平台以及多种技术手段的综合应用,因而水下作战活动异常复杂,对水下战场态势的分析验证以及对水下作战活动的演示呈现等都面临很多困难。信息化海战场上作战环境复杂多变,战场态势转换迅速,作战对抗异常激烈,采用抽象单一、静态描述的战场态势图等表达方式很难实现对水下战场态势进行准确直观的描述,对水下战场的实景态势仿真历来是作战仿真领域的难点问题之一[3]。本文研究设计了海洋水下战场态势仿真系统,采用三维建模以及场景可视化技术来实现对水下战场态势的实景描述,具有海洋水下作战模式演示、作战对抗效能分析等多种功能,系统可用于对水下作战效能的论证评估工具和水下作战模式的演示分析平台,同时还可用于对水下武器装备发展的决策评估和水下作战的指挥训练论证等方面。
1 系统的设计
1.1设计目标和思路
系统设计目标定位于开发能够实现海洋水下作战态势呈现和满足水下作战对抗军事仿真需求的应用软件,系统的主要功能为:对海洋水上、水下场景和自然环境的实景表现、对海战场尤其是水下战场作战双方态势的表现、对水下作战对象运动路线、运动区域、控制范围等的表现、对作战特效的表现等。系统的设计遵循以下思路:第一,在设计上支持离散事件仿真技术,仿真引擎的核心功能是进行仿真事件处理,启动阶段主要完成仿真事件队列的初始化,运行阶段能够对仿真事件依次处理,运行结束后仿真事件队列为空(不再有未处理的仿真事件);第二,采用模块化设计,系统的主要模块包括仿真数据I/O处理模块、仿真内核基础模块,仿真模型模板支撑模块,仿真引擎驱动模块,仿真实验数据获取模块等,这些模块相互之间具有稳定的层次依赖关系;第三,软件架构采用分层实现的方式,系统的不同层级具有相对独立的功能,相互之间可通过网络接口和数据文件接口实施交互。
1.2系统的结构设计
从结构组成的角度,海洋水下战场态势仿真系统主要由仿真引擎、作战想定编辑、仿真运行管理、仿真场景表现和数据辅助分析等模块组成,具体设计如图1所示。

图1 系统的结构组成
其中,仿真引擎是整个系统的核心,通过读取以文本形式存储的仿真想定文件,然后进行仿真运行,实现对仿真事件的处理。仿真模型编辑主要实现对模型实例档案管理和模型实例管理,用户通过交互界面对模型模板中的待定参数进行设定,由通用性模板具体化为模型档案。模型实例通常在模型实例档案的基础上创建,模型实例类型包括指挥及作战实体、交互表或战术规则等。仿真想定编辑模块中提供了可显示三维水下环境和二维海图的基本框架,用户可在二维海图的交互界面下设置各种仿真想定要素。设定想定态势时,可定义想定态势中所涉及的对抗方以及对抗方之间的关系,如对敌方探测毁伤、对中立方仅探测、对我方提供信息支援等,仿真想定编辑中还提供模型分辨率的设定、对抗阶段的划分、指挥控制关系的设定以及对抗行动方案的制定等功能。仿真运行管理主要对仿真引擎的运行情况进行监视。仿真场景表现具有实景漫游功能,可绘制各种典型的水下场景和水下环境,通过接收来自仿真引擎的数据还可绘制战场客观态势和某参与方的感知态势等。仿真数据辅助分析提供了多种实用工具用于对态势仿真进行实时数据展示、对仿真定制数据进行可视化显示以及对仿真结果进行事后分析。系统的基本功能流程设计如图2所示。
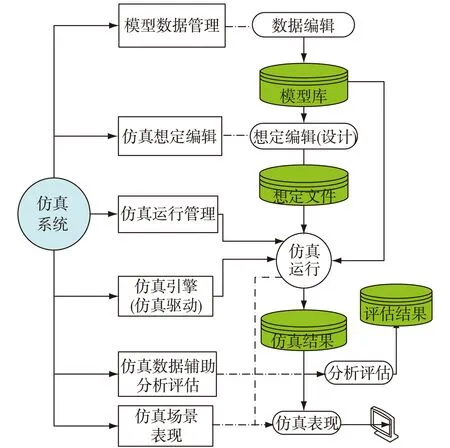
图2 系统的功能流程
一般情况下,系统按上述基本流程进行,个别情况下,还允许使用者对某些过程进行反复,如模型数据编辑与想定编辑过程之间可以进行循环往复地操作,另外,系统的整体流程可进行必要的循环操作,即在完成一个完整的仿真实验过程后,还可以根据需要重新进行想定编辑乃至于进行模型数据的修改。
1.3系统的数据处理流程设计
海洋水下战场态势仿真系统以数据为中心设计和运行,系统的数据库包括仿真模型数据库、想定文件数据库和仿真结果数据库,各功能模块和子系统都可通过与数据库进行交互来实现其功能。例如模型管理过程就是模型管理工具与仿真模型数据库进行交互的过程,想定编辑则是想定编辑工具与仿真想定库进行交互的过程,而仿真运行的结果则保存在仿真结果库中,具体交互关系设计如图3所示。

图3 子系统与数据库的交互关系
系统采用集中式数据存储策略,仿真模型数据、仿真实验想定数据、仿真实验结果数据、仿真实验分析数据等不同的数据都具有统一规范的存储格式。分布式运行模式下,系统的数据流程设计如图4所示。
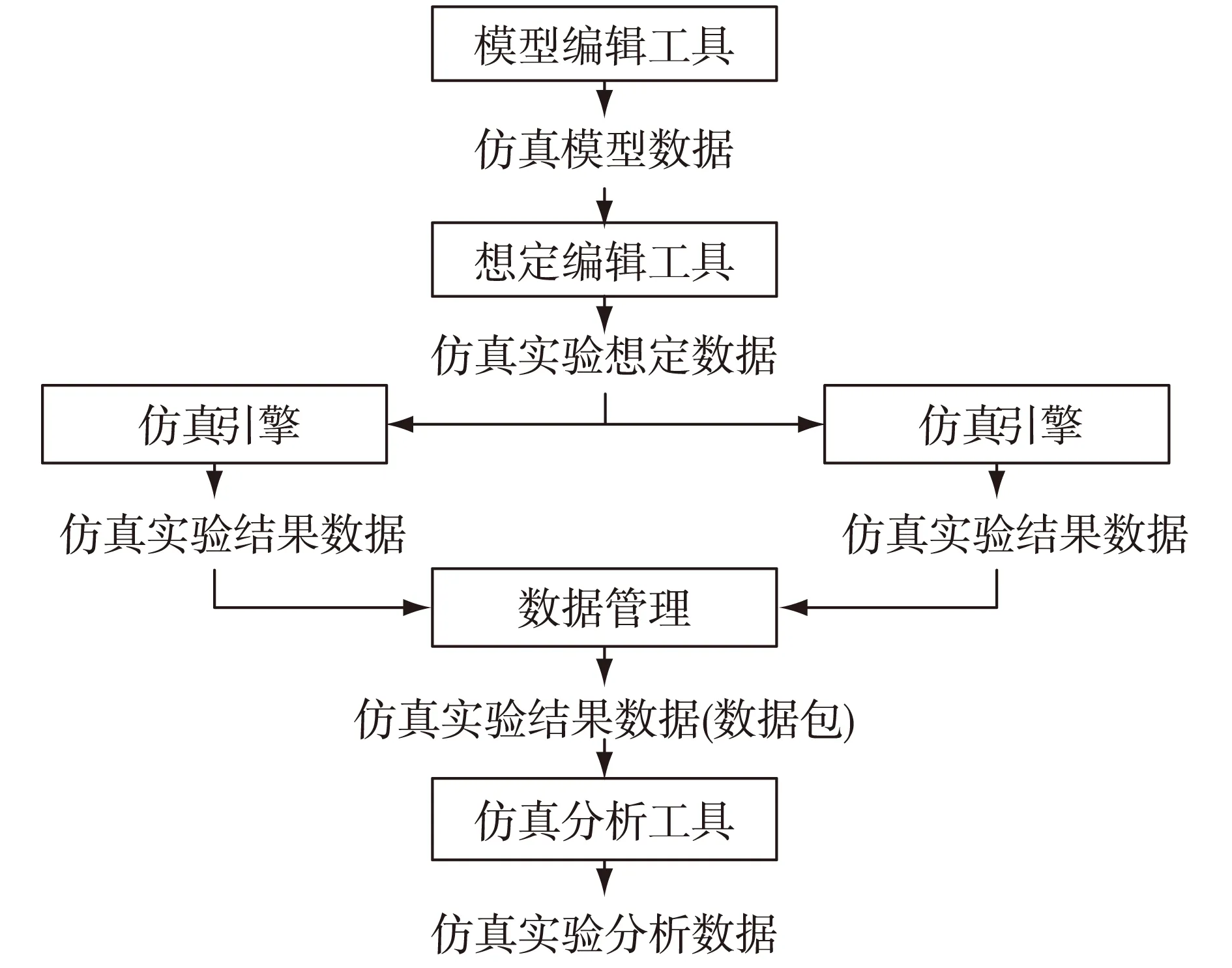
图4 仿真平台的数据处理流程
图4中,仿真模型数据可通过仿真模型编辑工具进行添加、删除、修改或浏览,可作为想定编辑工具的输入项;仿真实验想定数据可由想定编辑工具生成、编辑及管理,实验想定数据以独立文件的形式提供给仿真引擎,作为其仿真驱动的输入项;仿真引擎在实验过程中,根据用户在想定中的设置,实时截取(获取)仿真实验过程(结果)数据,是仿真实验分析的基础,其结果作为仿真实验分析辅助工具的输入项。
2 系统的开发及应用
2.1系统的开发方案
系统开发方案的核心包括仿真引擎设计、作战实体及场景的建立和系统界面的建立等[4]。其中,仿真引擎是仿真系统开发的核心,其基本运行流程为:1)载入仿真想定;2)仿真初始化,即仿真事件队列初始化;3)进行仿真运行主循环,开始发布战场总体态势,发布仿真实体及组成系统的状态参数,发布实时仿真事件,同时可以接收运行控制指令,其中退出条件包括用户干预或运行状态达到预定值,循环体包括仿真事件处理过程及仿真裁决过程;4)仿真想定运行结束,保存仿真运行状态以及清理数据结构。仿真引擎的驱动机制方案如图5所示。
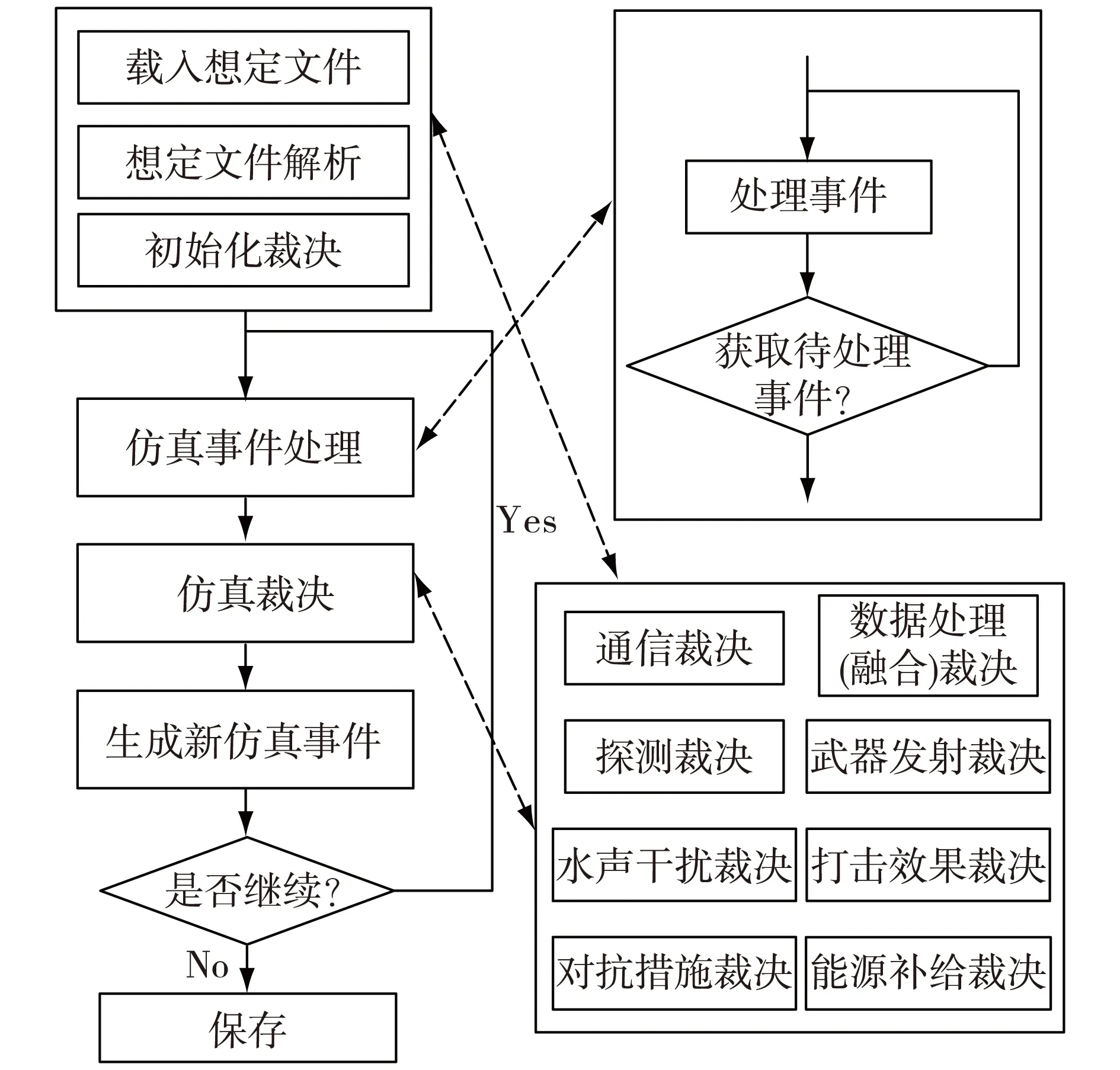
图5 仿真引擎的驱动机制
作战场景及实体的建立主要包括海面场景、水下场景、气候环境以及各种作战实体模型等。海面场景和水下场景共同构成了三维虚拟海洋环境,为了态势仿真的真实性,由海面及水下场景组成的三维虚拟海洋环境构建的数据基于电子海图中提取的数据进行,包括各类真实的经纬度信息、水深、底质、海流、潮汐等自然地理要素以及人工地物、助航设备和陆地方位物等要素信息,水下场景中的水下地形模型数据基于电子海图中的水深和高程点信息来生成。采用MultiGen Creator中的地形建模模块来完成对水下场景中地形的构建,由于水下地形数据来源于电子海图的水深和高程点要素信息,MultiGen Creator无法支持,可采用MultiGen Creator中的转换工具readusgs将电子海图数据转换为DED格式的数据,在MultiGen Creator中应用Terrian模块对其进行建模和纹理等处理,即可生成水下三维地形视景模型[5]。对于水下作战涉及的各类作战实体模型,主要基于手工建模的方法进行,具体采用3dsMax 2012和Multigen Creator 3.0.1软件联合完成,具体步骤是先采用3dsMax进行实体的建模,完成后导入creator对模型实施简化等操作,并保存为仿真领域大量采用的OpenFlight格式[6]。视景驱动部分主要由VC++和OSG(Open Scence Graph)联合实现,其中OSG作为基于C++平台的应用程序接口(API),是一个面向对象的三维视景仿真开发包[7]。具体实现中可对OSG类库进行二次开发,并采用osgOcean模块进行大范围海面模拟,采用osgEarth模块生成海面场景和水下场景,部分OSG实现程序代码如下:
void MyOSG::InitSceneGraph()
{
InitTexture();//初始化纹理
InitShaders();//初始化shaders
InitTerrain();//初始化地形
InitUnwaterParticle();//初始化水体粒子
InitGodRay();//初始化水下光柱
}
void
MyOSG::InitCameraConfig(void)
{
RECT rect;//Local Variable to hold window size dat a
mViewer=new osgViewer::Viewer();//Create the viewer for this window
mViewer->addEventHandler(new osgViewer::StatsHandler);//Add a Stats Handler to the viewer
……
osg::ref-ptr
osg::ref-ptr
}
void MyOSG::PreFrameUpdate()
{
UpdateSunPosition();//更新世界光源位置
UpdateModePosition();//更新目标位置
UpdateGodRay();//更新水下光柱方向
}
2.2系统的部署
海洋水下战场态势仿真系统具有海战场实景态势呈现、作战对抗过程仿真演示、作战对抗效能评估以及相关辅助分析等功能,根据不同的仿真目的及用户要求,系统可采取不同的部署和运行模式。例如,对于单一想定或者作战对抗效能评估的应用,采取简单的单机后台运行的模式即可满足要求,如图6所示。

图6 单机后台运行模式
对于多想定和多复本情况下,为了更好地满足需求,可采取多机分布后台运行的模式,即通过仿真运行管理节点将仿真任务(仿真想定复本)发送到不同的计算节点,各计算节点通过仿真通信引擎实施互联,共同执行同一仿真应用(想定),仿真引擎后台运行得到结果后再汇总到仿真运行管理节点上,其中仿真通信引擎可以是基于HLA/RTI或DDS等仿真通信平台,如图7所示。

图7 多机分布后台运行模式
2.3应用实例
海洋水下战场态势仿真系统输入确定的仿真想定后即可运行并实现实景态势仿真,用户可在二维海图的交互界面下设置各种想定要素,需要进行想定编辑的相关要素包括:
1)定义对抗双方。定义态势仿真中所涉及的对抗方,对对抗双方之间的关系进行定义,如对敌方进行探测毁伤、对中立方仅探测、对我方提供信息支援等。2)设置仿真分辨率。设置态势仿真中所采用模型的分辨率,如选择通信模型的分辨率、传感器模型分辨率及环境分辨率等。3)划分对抗阶段。对抗阶段是指挥控制战术触发的先决条件之一,通过定义对抗阶段,可进行多阶段的复杂仿真。4)编辑指挥控制关系。编辑作战对抗各方的指挥控制关系。根据想定文本资料,设置对抗系统各组成部分的指挥控制方式。5)制定对抗行动方案。用户可以通过人机交互界面设置作战对抗行动方案,如可制定分布式探测、集群搜索、机动毁伤、信息支援等行动方案。6)制定通信及探测传感器等运用方案。可设定作战对抗系统的通信网络类型及参数;通信网络的连接方式、信息包格式、信息路由等详细信息;可设置探测方式和策略,传感器、武器系统和通信系统之间的协同关系等。7)定制输出信息。如关键事件时间信息、命中与毁伤事件统计信息、通信与探测传感器事件的统计信息(探测概率和范围、通信距离和速率)等。
海洋水下战场态势仿真系统提供了可显示三维深海环境的基本框架,具有海战场漫游功能,特别是可根据海图信息绘制各种典型深海场景和深海环境,通过接收来自仿真引擎的数据绘制出海洋水下战场的客观态势以及不同参与方的感知态势等。图8给出某一想定条件下海战场的全景作战态势图实例。
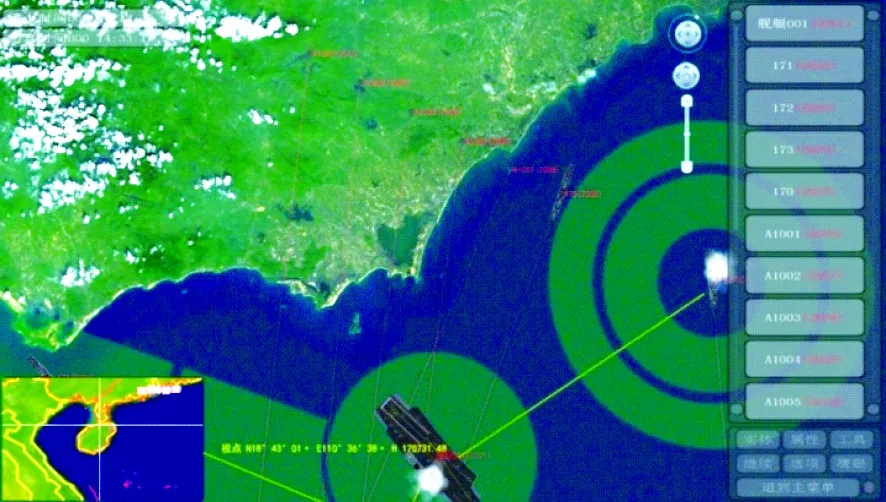
图8 某一想定条件下海战场的全景作战态势图效果
图9(a)-(c)给出了该作战想定背景下的海洋水下战场的作战实景态势效果图。

图9(a) 水下探测监视三维实景态势图

图9(b) 潜艇水下巡航三维实景态势图

图9(c) 水下UUV攻击行动三维实景图
3 结束语
近年来,作战仿真领域的相关技术和工具都得到了快速的发展,相关的应用已经相当成熟。但由于水下战场环境的特殊性以及水下作战对抗的高度复杂性,对于海洋水下战场态势的实景描述以及对水下作战对抗的可视化展现始终是模拟仿真领域的难点问题。本文对海洋水下战场态势仿真系统进行了研究设计,在提供相对完善的水下作战论证评估和演示分析功能的基础上,还采用实体建模、大规模地形建模和OSG开发工具实现了基于电子海图数据的三维海战场环境尤其是水下战场环境的高精度仿真,在水下态势展示方面具有较好的实时性和较高的逼真度水平。
[1]Castaneda P, Wei C C, Chiam D. Advanced undersea warfare systems[C]. Proc. of the AUVSI Unmanned Systems North America Conference,2011:691-693.
[2]Floore T E, Gilman G H. Design and capabilities of an enhanced naval mine warfare simulation framework[C]. Proc, of the Winter Simulation Conference, 2011:2607-2613.
[3]Seo K M, Song H S, Kwon S J. Measurement of effectiveness for an anti-torpedo combat system using a discrete event systems specification-based underwater warfare simulator[J]. Journal of Defense Modeling and Simulation,2011,8(3):157-171.
[4]李晓燕,王立冬,郭金良,等. 电子战三维视景软件适应性架构设计[J]. 电光与控制,2014,21(4):86-90.
[5]范亚兵,王明海,范亚洲,等. 一种基于OSG的海量地形快速渲染方法[J]. 测绘与空间地理信息,2014,37(7):190-192,196.
[6]张乐,韩佳盈,张蛟,等. MFC框架下的Vega Prime三维视景程序开发技术[J]. 火力与指挥控制,2014,39(3):159-162.
[7]吴琼,孙韶杰,刘建,等. 基于OSG的战场态势仿真系统的设计与实现[J]. 指挥控制与仿真,2014,36(2):69-74.
Design and Implementation of the Situation Simulation System for Marine Underwater Battlefield
LI Zhuo1,2, WANG Qing-yu2, GAO Da-yuan1
(1.Navy Submarine Academy, Qingdao 266199;2. Unit No. 92995, Qingdao 266100, China)
There is always a difficult problem in the show the real situation of underwater battlefield and demonstration and analysis of underwater combat in the field of warfare simulation because of the particularity of the underwater environment and complexity of the underwater combat. Based on the application background of underwater warfare in the modern sea fight condition, the situation simulation system for marine underwater battlefield is designed and implemented in the paper, and the function structure and process of the system and the data processing and project etc are presented, and the development and deployment for the system are realized, the simulation examples show that the system can provide a high precision simulation for the real situation simulation of marine underwater battlefield, and it serve as a demonstration analysis platform for the real situation of marine underwater battlefield and a assessment tools of the underwater combat.
underwater battlefield; real situation; simulation system; development and deployment; design and implementation
1673-3819(2016)04-0079-05
2016-02-28
2016-03-30
国家863基金(AA8094027B)
李卓(1975-),男,辽宁兴城人,博士后,工程师,研究方向为模拟仿真、导航系统、水下作战理论等。
王庆裕(1971-),男,高级讲师。
TP391.9;E943
A
10.3969/j.issn.1673-3819.2016.04.017
高大远(1978-),男,博士,讲师。
猜你喜欢
社会科学战线(2022年4期)2022-06-15
国画家(2021年4期)2021-10-13
现代企业(2021年2期)2021-07-20
华人时刊(2021年23期)2021-03-08
房地产导刊(2020年12期)2021-01-14
汽车与安全(2020年1期)2020-05-14
人民交通(2020年4期)2020-04-16
中国外汇(2019年19期)2019-11-26
中国外汇(2019年16期)2019-11-16
商周刊(2017年22期)2017-11-09
