
基于激光雷达测试飞机形貌的关键技术
2016-08-16 05:35四川职业技术学院机械工程系徐凤蒋毅
河北农机 2016年4期
四川职业技术学院机械工程系 徐凤 蒋毅
基于激光雷达测试飞机形貌的关键技术
四川职业技术学院机械工程系徐凤蒋毅
在工业迅猛发展的现代社会,对于测量的要求,尤其是对大尺寸测量要求越来越高,小到微电子,大到航空航天工业产品都需要精密的测量技术。而大尺寸测量对测量技术、测量设备更是提出了新的要求。
本文通过参阅国内外的先进经验以及国内外的理论文献,针对应用激光雷达来测试航天航空飞行器这样大尺寸的复杂外形物体的测量技术进行了关键技术的研究,实现了高效率、高质量的三维形貌测量以及在线检测,对工程的实施有很大的帮助。
激光雷达;飞机形貌;测试
1激光雷达
对于传统的雷达,它们是依靠微波和毫米波段的电磁波为载波进行工作和运转的。而激光雷达则是依靠激光作为载波,激光是光波波段的电磁辐射,波长相对微波和毫米波的波长要短得多。它们可以用振幅、频率、相位和偏振等搭载信息,它们是信息的载体。由激光发射机、光学接收机、转台和信息处理系统等组成。激光雷达是激光技术和现代光电探测技术结合的先进的探测方式。
1.1激光雷达测量系统测量功能有以下几方面
(1)可以进行精密的3D测量;
(2)可以进行在线自动化检查;
(3)可以与CAD模型进行在线比对;
(4)可以进行逆向工程。
1.2激光雷达测量系统测量优势
可单人操作完成测量;属于非接触式测量;不存在偏移量误差;测试精度优于手工移动靶球测量方式;几何量测量速度快;可实现真正的自动测量,测量时间和次数不受限;易获取高密度测量数据,且不会出现数据重叠和测量时间的浪费;抗干扰能力强,对测量面材质适应性强。
2激光雷达测距
激光雷达测量系统的实质是一个非相干的连续波激光测距机,是一个目标球面坐标测量系统。激光雷达测量系统与激光跟踪仪的测角原理是基本相同的,但它的测距原理使用了和无线电或者微波雷达相似的原理。
2.1激光雷达测距系统
激光雷达测距系统中典型的为激光雷达脉冲测距,它属于非相干激光雷达。近年来,激光测距雷达除了有测距功能以外,还有测角定位,测距变化率,实时跟踪,距离、轮廓成像等功能。激光能源先进行能量储存,然后将其能量传送给脉冲激光器的激光。然后通过分束器,一部分分光进瞄准光学系统,通过激光发射天线系统,发射出激光信号到目标上。
脉冲激光器把激光能量通过分束器把另一部分能量传递给光电二极管探测器,此时分光脉冲控制计数器进行计数。再通过计算机启动脉冲,距离、速度、回波到达时间都提供一定测量精度的测距和距离变化率的信息。
2.2激光测距雷达原理和组成
连续波激光测距雷达是使用已经调制好的连续波激光器对准目标发射连续波激光束。激光接收机接收目标反射回波,再通过测量发射的激光束和接收的目标回波的强度,因此激光器常用幅度调制:

使用连续波激光测距雷达测定相位偏移有以下两种方法:
(1)多波长相位偏移干涉法
多波长相位偏移干涉法通过相位偏移量测定距离。使用很稳定的振荡器驱动光电调制器,通过光电调制器把激光辐射源射出的光调制成连续波的光强,使用接收信号的相位计测出相位偏移量,一般通常为2π的倍数。距离R和所测量的相位移之间的关系为:
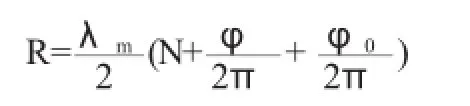
式中,R是被测距离;λm是调制波长;N是调制波数;φ是激光测距雷达固有的恒定相移;φ0是测量的相位移。如果调制波长λm小于等于被测距离R,那么在确定调制波长数N时便可能会产生几个值。如果既要使测距精度较高,又不让调制波长数产生多值,就可以通过依次用多个波长(必须测量每个波长的相位移)来获取连续波激光器的调制信息。
如:要测千米的距离,需要用2个调制波长。测万米的距离,就需要用5个调制波长。在多个调制波长中,使用最短的调制波长作为精测频率,也可以称为基本测量频率,因为最短的调制波长决定了测距的精度。而其他调制波长则作为粗测频率或辅助测尺量频率。在测量中,精测频率必须足够高,也就是精测波长必须足够短,这样才能保证测距的精度。由于相位测量的极限值
式中,ΔR为测距精度;λml为测距波长。
(2)频率调制测相位移法
利用频率调制测相位移法测量连续波激光测距雷达,如图1所示。多波长相位偏移干涉法用光电调制器设置连续激光器载波的幅值,频率调制测相位移法则用微波调制连续激光器输出的幅值。微波调制器调制的频率在发射的激光束往返于被测物体的时间内发生连续变化。经往返时间t=2R/c后,到达接收光学天线的回波信号与微波发起的瞬时信号进行混频,由于在混频器时,回波信号会产生时间延迟,它与距离有关则产生频率差,其值为f0。再传送到光电探测器上,把两种不同的光信号进行光混频,这样就可以得到频差信号,从而计算出目标距离。
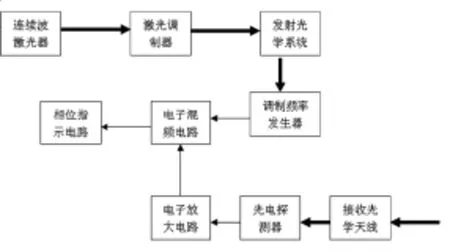
图1 频率调制法连续波激光测距雷达的方框图
由于要得到的频率随着时间进行线性变化很困难,所以频率调制测相位移法不太适合于高精度测距。因为连续波激光测距雷达平均发射功率较低,因此其测距范围相比同等脉冲激光测距雷达差很多。连续波激光测距雷达多数情况用在对同等范围的目标测距系统上。
[1]AnalogDerices Ine.ASDP21020User's Manual[M]. Analog Deviese Ine.1991.
[2]王彤.PC机在测量和控制中的应用[M].哈尔滨:哈尔滨工业大学出版社,1995.8.
[3]薛宏熙等.MACH可编程逻辑器件及其开发工具[M].北京:清华大学出版社,1998.
[4]刘少创,尤红建,刘彤等.机载激光测距扫描成像制图系统的定位原理与误差分析[J].武汉测绘科技大学学报,1999,24(2):124~128.
徐凤,1981年出生 ,四川遂宁人,讲师。
猜你喜欢
北京测绘(2022年5期)2022-11-22
汽车观察(2021年8期)2021-09-01
科学(2020年3期)2020-01-06
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26
通信电源技术(2018年5期)2018-08-23
制导与引信(2017年3期)2017-11-02
电子制作(2017年7期)2017-06-05
中国高新技术企业(2015年25期)2015-07-24
中国高新技术企业(2015年12期)2015-03-31
