
无人作战系统决策调度模型设计与仿真*
2016-08-11 08:15:37金华刚杨新民
新技术新工艺 2016年7期
金华刚,杨新民,殷 明
(1.中国电子科技集团第二十八研究所,江苏 南京 210007;2.南京航空航天大学,江苏 南京 210016)
无人作战系统决策调度模型设计与仿真*
金华刚1,杨新民1,殷明2
(1.中国电子科技集团第二十八研究所,江苏 南京 210007;2.南京航空航天大学,江苏 南京 210016)
随着现代军事技术的发展,无人作战飞行器作为战争中的重要工具,在空中作战中发挥着日益突出的作用。可以预见,在未来战争中,无人作战飞行器将发挥重要的作用。从空战无人作战系统模型入手,设计了三层结构的无人作战系统决策调度模型,进而基于Agent设计了实验仿真模型,利用引入协商机制的改进型遗传算法进行了实例仿真。实验表明,所设计的无人作战系统具有比较好的适应性,并具有一定的实用价值。
无人作战;决策调度;Agent;遗传算法
在现代战争环境下,无人作战飞行器作为未来空中力量的重要一环,正在向集群化、网络化和智能化的方向发展。以无人作战飞行器为任务终端的无人作战系统是未来战争最重要的发展趋势之一。目前,世界上相对成熟的无人作战系统有美国的协同作战系统(CooperativeEngagementCapability,CEC)和美国陆军的未来战斗系统(FutureCombatSystems,FCS)等,“平台无人,系统有人”、“人在环内,不在机(弹)上”成为无人作战系统最基本的设计思想和决策控制特征[1]。对于无人作战系统而言,人在环内最高层,通过信息网络实施不进行任何具体操作的指令控制。本文所设计的无人作战系统决策调度模型就是一个指挥、控制、通信和情报的统一体。
1 无人作战系统的构成与分析
本文以空中无人作战平台为例(智能导弹或攻击型无人机)进行分析研究。一般情况下,一个基本的无人作战系统包括多个无人作战平台(导弹集群或无人机编队等)、任务规划和控制节点(以无人机为平台的空中指挥中心)、地面指控中心、无人作战平台的通信数据链路系统以及空天地一体化的作战指挥系统。
无人作战系统典型构成如图1所示。以无人机为载体的空中指挥平台,与以导弹、无人机为代表的无人作战平台组成编队,形成最小的战术系统,加上预警机和地面指挥系统,可构成战役系统。对于战略系统,必须包含卫星和多个地面指挥系统。其中,无人作战平台任务规划和控制站配置在空中指挥平台上。空中指挥平台与无人作战平台之间的通信构成无人作战平台的通信链路系统,空中指挥平台与预警机、地面指挥控制中心等之间的通信包含在空天地一体化的作战指挥系统中。

图1 无人作战系统典型构成图
多个无人作战平台组成系统中的作战集群,在作战环境下,由地面指挥控制中心或预警机通过联合战术分发系统,实现对作战集群的远程指挥,由空中指挥平台完成集群编队战术决策和任务调度,由无人作战平台完成作战任务,充分实现空中指挥平台与无人作战平台集群联合编队之间的信息共享、可用资源的统一调度和作战任务的综合管理[2]。
2 无人作战系统决策调度模型
无人作战系统的决策调度系统应该具有面向多无人作战平台协同作战的控制层阶结构,以及多无人作战平台之间任务调度的逻辑结构。本文设计的模型如图2所示。该模型自上而下划分为协调控制层、规划调度层和执行层,执行层又包括战术层和调节控制层。其中,协调控制层可位于地面站或预警机中,规划调度层位于空中指挥平台中,执行层驻留在无人作战平台上。

图2 无人作战系统控制层阶与逻辑结构图
高层决策调度包括协调控制层和规划调度层。协调控制层将整个作战任务(攻击等)分解成每个无人作战平台编队的作战目标,实现无人作战平台编队之间的协同任务控制,通过预定协议与各无人作战平台编队进行协商,实现相互之间的任务分配和任务协调,使系统内的所有无人作战平台及其编队形成一个作战整体。规划调度层实现无人作战平台编队的内部任务控制,包括任务规划、航路规划和轨迹规划等3个内控层次和任务分配、计划协调和冲突消解等3个外协层次[3],其由各种规划算法和管理软件组成,实现无人作战平台的任务调度、任务管理、任务规划和航路规划等,并为协调控制层提供用于与其他无人作战平台协商的信息。
底层控制指的是无人作战系统执行层控制,是无人作战平台自身运动控制部分,包括战术层和调节控制层,为规划调度层提供系统的状态参数等基础数据支持,从而为系统决策控制提供支撑。
3 资源约束下的决策调度仿真
3.1仿真模型的建立
基于上述无人作战系统模型的决策调度仿真,应在实验设计上重点体现以下几个要素:1)反映无人作战系统整体(包含卫星、预警机、地面阵地、控制指挥平台和无人作战平台)、无人作战编队(1个控制指挥平台与多个无人作战平台)和独立的无人作战平台(特定型号的智能导弹或无人机)3层运行主体;2)能够进行基于决策规则和协商机制的自主控制决策与任务调度;3)通过算法实现的决策规则和协商机制能够获得优化的作战调度方案。
对于无人作战系统而言,一旦投入战斗状态,系统所有任务都必然受到有限资源环境(如油料资源、通信资源、火力资源和位置资源等)的约束,自主决策控制与任务调度的过程就必须在这些约束下寻求最佳状态完成任务。本文的仿真实验尽量简化战场环境,考虑在有限资源约束下,仿真决策过程获得自主决策控制的调度结果。
在仿真实验中,将总资源设定为一个常数,对于每个无人作战平台而言,执行一个最底层的任务的代价可以用完成时间和资源消耗这2个参数来描述,自主决策调度以最充分利用资源,最短时间完成作战任务为优化目标。
无人作战系统的任务是由多个无人作战编队组成的,每个编队的任务又可以分解成若干个无人作战平台的任务,因此可以用一个多Agent系统来模拟无人作战系统,每个Agent代理一个由1个空中指挥平台和多个无人作战平台组成的作战编队,每个Agent任务代表一个无人作战编队的任务,且可以分解成若干个Agent子任务,即每个作战平台的任务。
假定单个无人作战平台的作战功能各不相同,对于同一个Agent任务,其分解成的Agent子任务之间存在着优先级制约,比如对于协同侦查与监视任务,敌区域感知子任务的优先级高于敌区关键设施搜索子任务,敌区关键设施搜索子任务的优先级又高于目标设施定位与特征采集子任务;对于不同的Agent任务,各自分解出来的Agent子任务之间又存在资源竞争问题。
多Agent系统自主决策调度的目标是在满足实时性要求的时间内,给出应对当前整体作战任务的最佳解决方案。具体的讲,就是在最短时间内完成一个满足任务时间要求和Agent子任务优先级排列,且系统资源允许的作战任务调度方案。
3.2仿真算法的选取
可用于任务决策调度的算法很多,本文选择引入协商机制的改进型遗传算法[4],通过1个染色体代表一个整体的作战任务方案;通过染色体的矩阵化结构设计,体现各任务编队(Agent任务)及各无人作战平台任务(Agent子任务)的任务序列及资源消耗关系;通过Agent协商模拟系统内各编队之间的沟通机制;通过适应度函数的设计,实现总资源约束和最优作战调度方案比选。
3.3仿真实例
实验假设完成某一作战任务时,需要协同侦查与监视、对敌防空压制、协同攻击关键设施和协同攻击防空系统等4个无人作战任务编队组合完成任务。假设4个任务编队中都只有3个无人作战平台,即都可以分解为3个子任务,各个子任务耗费资源和占用时间的情况量化为数字指标(见表1),同一个Agent任务所分解出的子任务按优先级从高到低排列。

表1 自主决策控制算法指标值
选择6个任务结点,其总体作战方案矩阵,即染色体结构矩阵为:
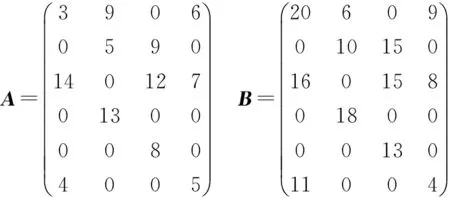
与总体作战方案矩阵对应的是时间消耗矩阵A和资源占用矩阵B,用于辅助计算适应度。
当TN矩阵中某一个基因值为1时,A、B矩阵与之对应位置的值为某一特定Agent子任务完成任务所消耗的时间和占用的资源。
假设系统总资源为50,取随机生成的作战调度方案个数即初始种群大小为6,交叉概率取为0.5,变异概率取为0.05,遗传算法执行次数取为15,为便于计算,将总耗时的倒数扩大100倍作为适应度值。运行程序,程序截图如图3所示。

图3 基于改进型遗传算法的决策调度运行程序截图
从图3可以看出,初始状态随机生成的调度方案适应度值参差不齐,随着程序迭代,调度方案的适应度值不断提高,当程序迭代到第12次时,生成了适应度值为3.225 806的最优任务调度方案,此方案的耗时最短为31,资源利用率最高。此方案对应的结构矩阵如下:

此方案对应的时间消耗矩阵A和资源占用矩阵B分别如下:
按照此决策调度方案(见表2),12个Agent子任务组合成6个启动批次,当前一批次中有Agent子任务完成,且腾出有足够下一批次Agent子任务的资源时,下一批次Agent子任务组合便启动任务。

表2 最优决策调度方案任务组合表
4 结语
本文主要研究了无人作战系统的决策调度模型的基本组成,并通过算法模型进行了仿真验证。后续可以逐步增加约束条件,完善决策机制和决策规则,形成完整的设计和仿真体系。
[1] 石章松, 左丹. 无人作战平台智能指挥控制系统结构[J]. 指挥信息系统与技术, 2012(4):12-15.
[2] 陈瑛, 刘丽, 曾勇虎. 美军未来无人系统发展的关键技术[J]. 飞航导弹, 2010(7):33-37.
[3] 龙涛. 多UCAV协同任务控制中分布式任务分配与任务协调技术研究[D]. 长沙:国防科技大学,2006.
[4] 赵敏,姚敏,刘兼唐.基于遗传算法的小卫星多Agent任务调度优化设计[J].仪器仪表学报,2008(7):1475-1479.
* 中国电子科技集团重大电子支撑项目子课题资助项目(PU52150237)
责任编辑郑练
UnmannedCombatSystemDesignandSimulationofDecision-makingSchedulingModel
JINHuagang1,YANGXinmin1,YINMing2
(1.ChinaElectronicsTechnologyGroupCorporation28thResearchInstitute,Nanjing210007,China;2.NanjingUniversityofAeronauticsandAstronautics,Nanjing210016,China)
Withthedevelopmentofmodernmilitarytechnology,theunmannedcombatflightasavitaltoolinthewar,inaircombatisplayinganincreasinglyprominentrole.Itisforeseeablethatinfuturewars,unmannedcombatflightchesswillplayanimportantrole.Fromtheunmannedcombatairsystemmodel,designunmannedcombatsystemdecisionsschedulingmodelwiththree-layerstructure,andthendesignexperimentsimulationmodelbasedonAgent,usingtheintroductionofconsultativemechanismsimprovinggeneticalgorithmissimulated.Unmannedcombatsystemprovedhereinhasabetteradaptability,andhassomepracticalvalue.
unmannedcombat,decisionscheduling,Agent,geneticalgorithm
2016-01-20
TP 273;V 271.4
A
金华刚(1978-),男,大学本科,高级工程师,主要从事指挥信息系统总体等方面的研究。
猜你喜欢
军事文摘(2023年5期)2023-03-27 08:56:26
小哥白尼(军事科学)(2019年2期)2019-04-17 02:17:28
制造技术与机床(2019年4期)2019-04-04 12:22:06
小哥白尼·趣味科学画报(2019年12期)2019-02-28 11:55:02
测控技术(2018年7期)2018-12-09 08:58:00
北京航空航天大学学报(2017年3期)2017-11-23 05:14:41
岷峨诗稿(2017年4期)2017-04-20 06:26:43
新高考(英语进阶)(2017年12期)2017-02-26 11:37:34
信息通信技术(2015年6期)2015-12-26 01:16:54
华东理工大学学报(自然科学版)(2015年4期)2015-12-01 04:00:45
