
基于神经网络算法的粮食智能控制系统研究*
2016-08-10 03:43刘拥军董春宵
计算机与数字工程 2016年7期
刘拥军 董春宵 杨 斌 高 博
(信息工程大学 郑州 450000)
基于神经网络算法的粮食智能控制系统研究*
刘拥军董春宵杨斌高博
(信息工程大学郑州450000)
摘要粮食烘干过程是典型的非线性、多变量、大滞后、参数关联耦合的非稳态传热、传质过程。针对这一问题,设计了基于神经网络和模糊控制算法粮食烘干塔智能控制系统。仿真结果表明,在进行一段时间的训练后,神经网络算法能够对烘干过程的各参数进行学习,结合模糊控制算法能够实现对粮食烘干过程的自动控制,使得烘干的粮食达到设定的水分值。
关键词烘干塔; 神经网络; 模糊控制; 智能控制
Class NumberTP273.9
1引言
我国现有大中型粮食烘干装备7000多套,装备水分在线检测和控制装置不足5%,基本都靠人工进行控制,容易造成烘干过度的粮食浪费及烘干不够造成的能源浪费。国家发展改革委和国家粮食局印发的《粮食行业“十二五”发展规划纲要》中专门提出了完善烘干设施的建设目标,在“十二五”期间“新建和改造一批粮食烘干设施,淘汰技术落后的烘干能力,使全国烘干能力保持在1.1亿吨以上,其中东北地区9100万吨以上,南方地区2000万吨以上。在东北地区改进烘干工艺和控制技术,节能减排,降低烘干成本,减少环境污染,保证烘后品质”。基于这一目标,开展了粮食烘干塔智能控制系统的研究[1]。
粮食干燥过程是典型的非线性、多变量、大滞后、参数关联耦合的非稳态传热、传质过程,传统的PID控制算法难以实现有效控制,需要研究多变量、非线性、大滞后的预测模型。神经网络能够根据训练的数据自适应的学习多变量、非线性、大滞后系统的参数,通过训练之后,就能够在粮食进入烘干塔的时候,根据当前的参数预测出粮食输出的水分值,通过该预测值联合其他参数作为模糊控制器的输入参数,实现粮食传送带电机的控制,使得烘干的粮食达到设定的水分值[2]。
2总体方案设计
该系统由温度/水分传感器、数据采集和预处理模块、控制模块和显示、顶层控制模块组成,该系统拟采用全数字化传输的方式,以确保系统数据传输的可靠性和抗干扰性能。同时采用高性能的ARM进行数据的采集和处理,保证数据采集和处理的实时性。同时,采用模块化设计,各个模块具有独立的功能,并能够实现自检,将自检信息上报,上位机形成整机的状态信息,方便整机的监测和故障的排除和维修。整体硬件架构设计如图1所示。
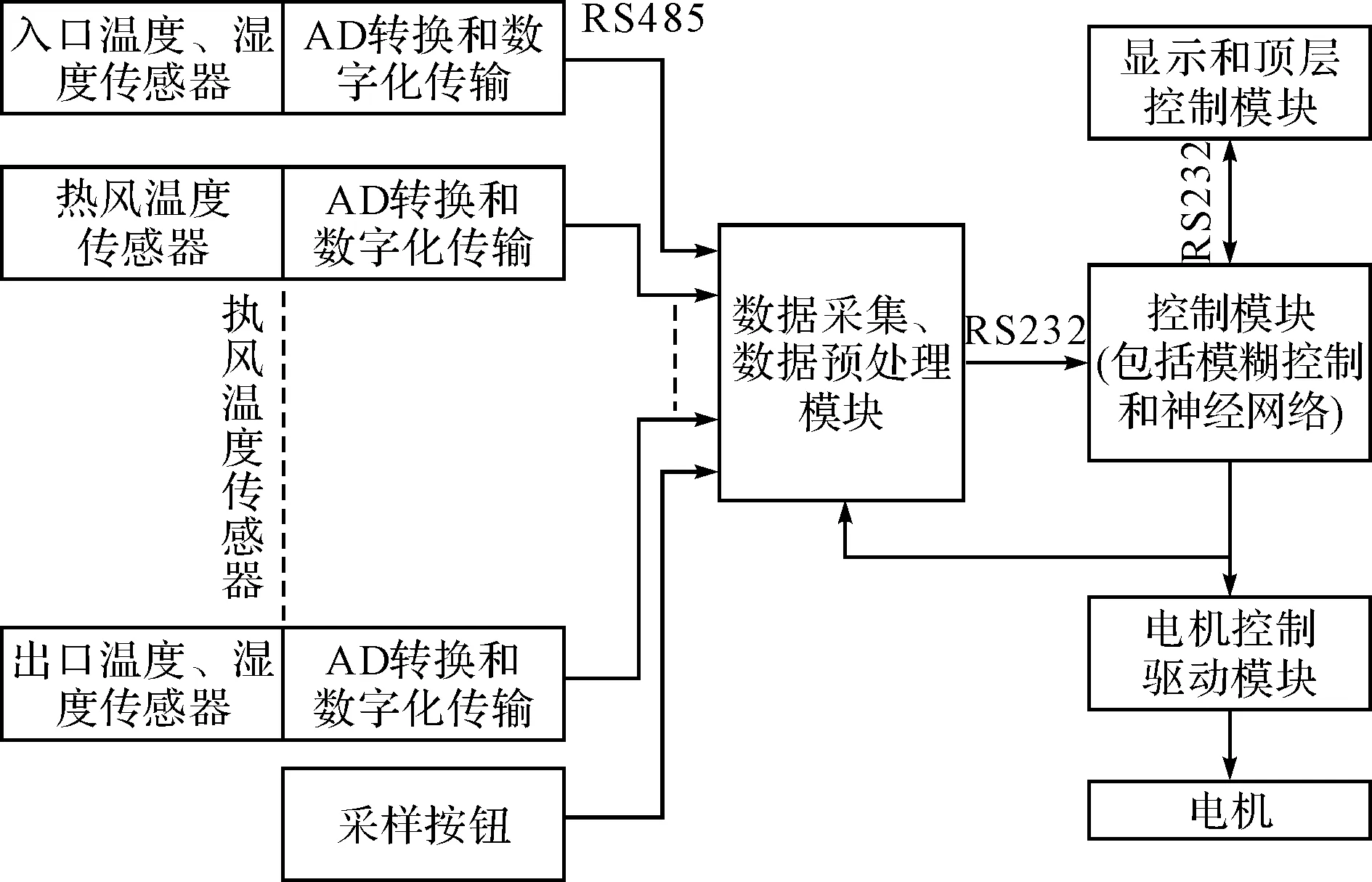
图1 粮食烘干塔自动控制系统硬件架构设计
3神经网络及模糊控制算法
控制算法通过对输入参数和输出结果的处理,近年来,人们开始研究将基于专家系统的模糊控制方法应用于粮食烘干塔的自动控制系统[3~4]。但是由于烘干塔的延时很大,模糊控制系统的控制精度难以保证[5]。本系统根据粮食干燥过程的特点,将模糊控制与神经网络相结合,设计粮食烘干塔智能预测控制算法。
3.1模糊控制和神经网络相结合的控制算法流程
由于粮食烘干塔是一个大滞后、连续输入的系统,系统有可能是一个矛盾系统,如,先输入的粮食的水分比后输入的粮食的水分要大很多;如只考虑当前段粮食的控制参数就会使得先输入的粮食在烘干塔中停留较长时间,后输入的粮食出来的时候的水分会小于设定值,甚至可能比设定值小很多。这种矛盾需要将相邻段的粮食的控制参数联合起来考虑,按照一定的权值进行平滑,获得综合评估后的控制参数[6]。可以采用权值滤波的方法进行联合控制,即取控制参数U=a*U1+b*U2+c*U3,U1为第一段的控制参数,U2、U3为后续第二段、第三段的控制参数;a、b、c为权值,一般a取值较大,如0.85;b、c依次减小;也就是将第一段作为主控参数,后续的影响依次减小。
基于模糊控制和神经网络相结合的控制算法流程如图2所示。
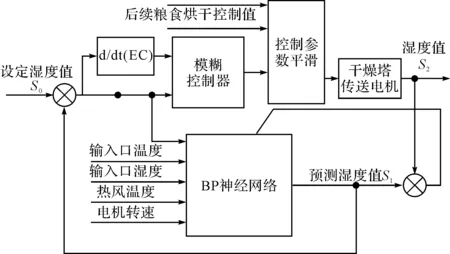
图2 基于模糊控制和神经网络相结合的控制算法流程
该算法先进行一段时间的训练,训练的过程主要是熟练工人进行操作,控制系统将输入口粮食温度、水分、热风温度等参数输入到神经网络,得到神经网络预测的粮食输出水分值,获得该预测值和实际输出水分测量值之间的差,利用该差值修正神经网络的内部参数,通过自适应算法逐步将内部参数调整到较为理想的值,使得预测水分输出值和实际测量值的误差达到一定的范围[8]。通过训练之后,就能够在粮食进入烘干塔的时候,根据当前的参数预测出粮食输出的水分值,通过该预测值联合其他参数作为模糊控制器的输入参数,实现粮食传送带电机的控制。
3.2神经网络
神经网络是一种多层前馈神经网络,该网络的特点是信号前向传递,误差反向传递,在前向传递中,输入信号从输入层经隐含层逐层处理,直至输出层。如果输出层得不到期望输出,则转入反向传播,根据预测误差调整网络权值和阈值,从而使神经网络预测输出不断逼近期望输出。神经网络的拓扑结构如图3所示。

图3 神经网络的拓扑结构
神经网络的训练过程主要包括以下几个步骤[9]。
1) 网络初始化。根据系统输入输出序列(X,Y)确定网络输入层节点数n,隐含层节点数l,输出层节点数m,初始化输入层、隐含层和输出层神经元之间的连接权值ωij,ωjk,初始化隐含层阈值a,输出层阈值b,给定学习速率和神经元激励函数。
2) 隐含层输出计算。根据输入向量X,输入层和隐含层间连接权值ωij以及隐含层阈值a,计算隐含层输出H:
式中,l为隐含层节点数;f为隐含层激励函数,该函数有多种表达形式,可选函数为
3) 输出层输出计算。根据隐含层输出H,连接权值ωjk和阈值b,计算神经网络预测输出O:
4) 误差计算。根据网络预测输出O和期望输出Y,计算网络预测误差e。
5) 权值更新。根据网络预测误差e更新网络连接权值ωij,ωjk:
i=1,2,…,m;j=1,2,…,l
ωjk=ωjk+ηHjekj=1,2,…,l;k=1,2,…,m
式中,η为学习速率。
6) 阈值更新。根据网络预测误差e更新网络节点阈值a,b:
bk=bk+ekk=1,2,…,m
7) 判断算法迭代是否结束,若没有结束,返回步骤2)。
当训练结束后,就可以根据新的输入值得到预测值。这里采用的输入数据包括:入口粮食温度、入口粮食水分值、热风温度(可能有多个)、电机转速;输出的参数是预测出口处粮食的水分和温度)。
具体的过程包括训练阶段和工作阶段,训练阶段主要是通过已知结果的数据的训练获得网络节点的权值。工作阶段是在权值稳定后,实时获得预测的出口处粮食的水分。
1) 训练阶段
粮食从入口到出口可以认为是分段进行的,需要对某一段粮食的入口温度和水分进行平均,作为神经网络的输入值。出口水分的处理也是一段粮食的平均值。最为复杂的是粮食从入口到出口的时间段内热风温度是不断变化的,不同的热风温度对粮食的干燥影响系数不是线性的,所以不能简单地将这个过程中的热风温度平均,而是要对不同温度的热风和其作用时间及影响系数进行加权后求平均,作为神经网络的热风温度输入参数。不同的热风温度对粮食的干燥影响系数需要专家提供知识,并通过测试进行调整。如果能够在烘干塔上均匀安装多个热风温度传感器,那么这个复杂的热风温度和水分模型就能够通过神经网络进行学习获得其非线性参数;如果不能安装多个热风温度传感器,那么热风平均温度的平均值的计算模型将是本系统性能的一个关键点。
训练的频度可以根据输入参数的数量、隐含层节点数和实际测试的数据进行调整,从硬件层面上来说,训练频度可以做到每秒几十次,但是实际的输入和输出参数的变换频度不高,不需要这么高的训练频度,可以根据实际情况进行调整。
2) 工作阶段
工作阶段一般不根据误差调整网络节点的权值。由于本系统一直可以获得实际的输出结果,虽然该结果有很大的滞后性,如预测值是在粮食进入时获得的,而实际结果需要几个小时后才能获得。但是可以将先前的预测数据和后面的实测数据保存,用于训练神经网络,这时,可以将学习速率η设为一个较小的值,使得网络节点的权值的调整受结果的影响较小;这样,神经网络在进行不断训练的同时,保持系统参数的稳定性。
通过训练阶段的神经网络节点的权值的训练,获得较为稳定的系统参数,这个参数其实是粮食出口水分和粮食入口温度、水分、热风温度、传送带速度等因素的非线性拟合函数。当粮食从入口处进入的时候,就可以根据当前的参数预测出这部分粮食在当前的条件下到达出口处的水分,根据预测的水分值调整系统的参数,主要是传送带的速度,就能够在出口处获得较为理想的粮食水分。控制传送带速度主要是采用模糊控制的方法。
3.3模糊控制
本系统拟使用的模糊推理算法为Mamdani,Mamdani模糊推理算法属于关系合成推理算法(简称为CRI方法),这种算法的基本原理可叙述如下:用一个模糊集合表述大前提中全部模糊条件语句前件的基础变量和后续的基础变量之间的关系;用一个模糊集合表述小前提,进而用基于模糊关系的模糊变换运算给出推理结果。结构框图如图4所示。
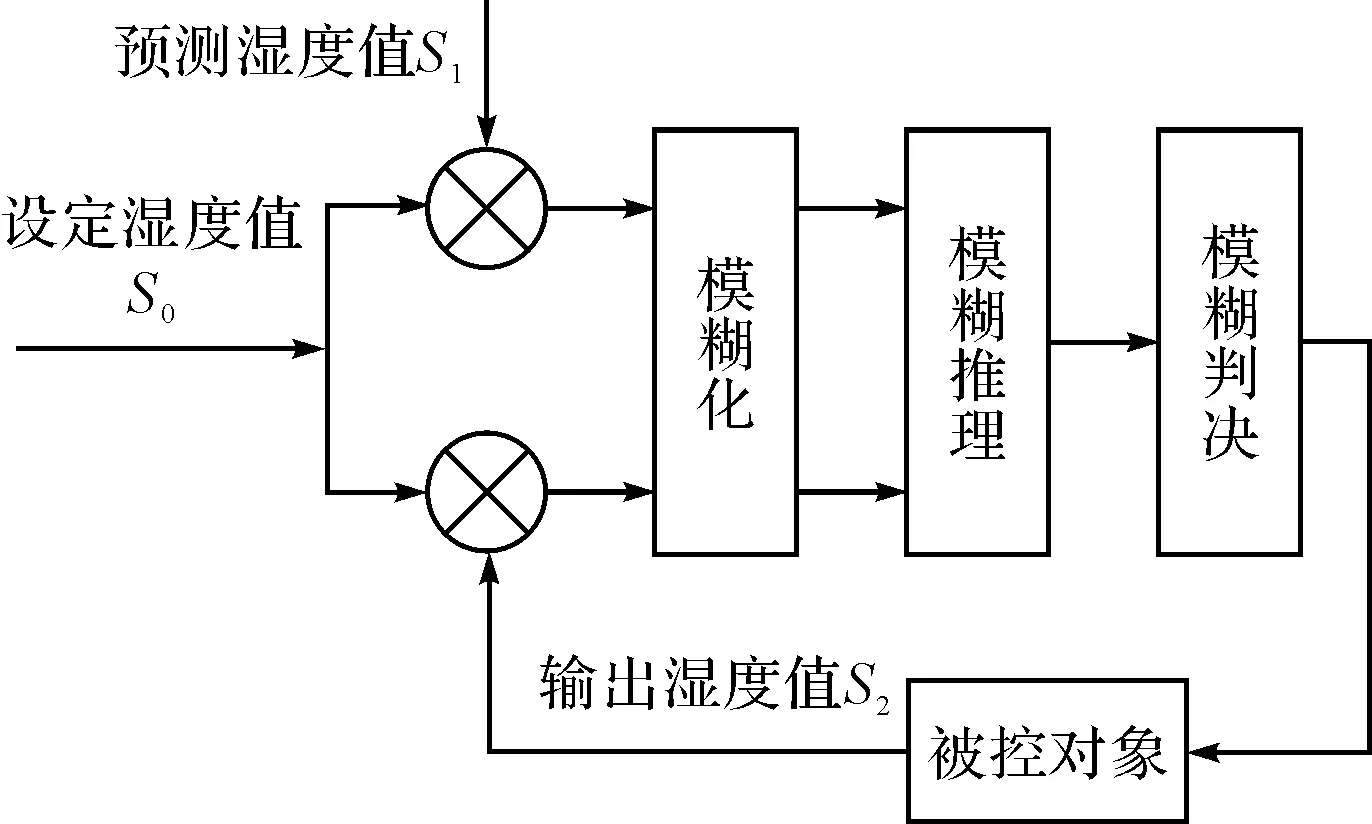
图4 模糊控制流程图
实际的控制过程是先将输入的精确量转换为模糊量,以便进行模糊推理和决策。模糊推理决策的主要功能是模仿人的思维特征,根据总结人工控制策略取得的语言控制规则进行模糊推理,并决策出模糊输出控制量。然后对经模糊推理决策后得到的模糊控制量进行模糊判决,把输出模糊量转化为精确量后,控制被控对象[10]。实际常用的实现方法是将系统模糊控制规则表存起来,根据输入的模糊变量查表得到模糊控制数量,这样做的好处是不用实时计算,只需要查表,大大节省了计算时间。同时,可以根据专家的经验和建议修改模糊控制规则表,非常直接地对控制系统进行调整,不需要修改算法的处理流程。
E为预测粮食出口的水分与设定的粮食出口水分之差,变化范围为-3%~3%,超过范围的值取±3%,量化域为[-6,-5,…,5,6]。量化因子为0.5%。也可以采用非均匀量化。

U为电机转速的速率变化控制量,当预测水分比设定水分大的时候降速,反之,则加速电机的转速。变化范围为[-30r/s,30r/s],量化域为[-6,-5,…,5,6]。量化因子为5r/s。
根据上述参数,得到控制规则表如表1所示。
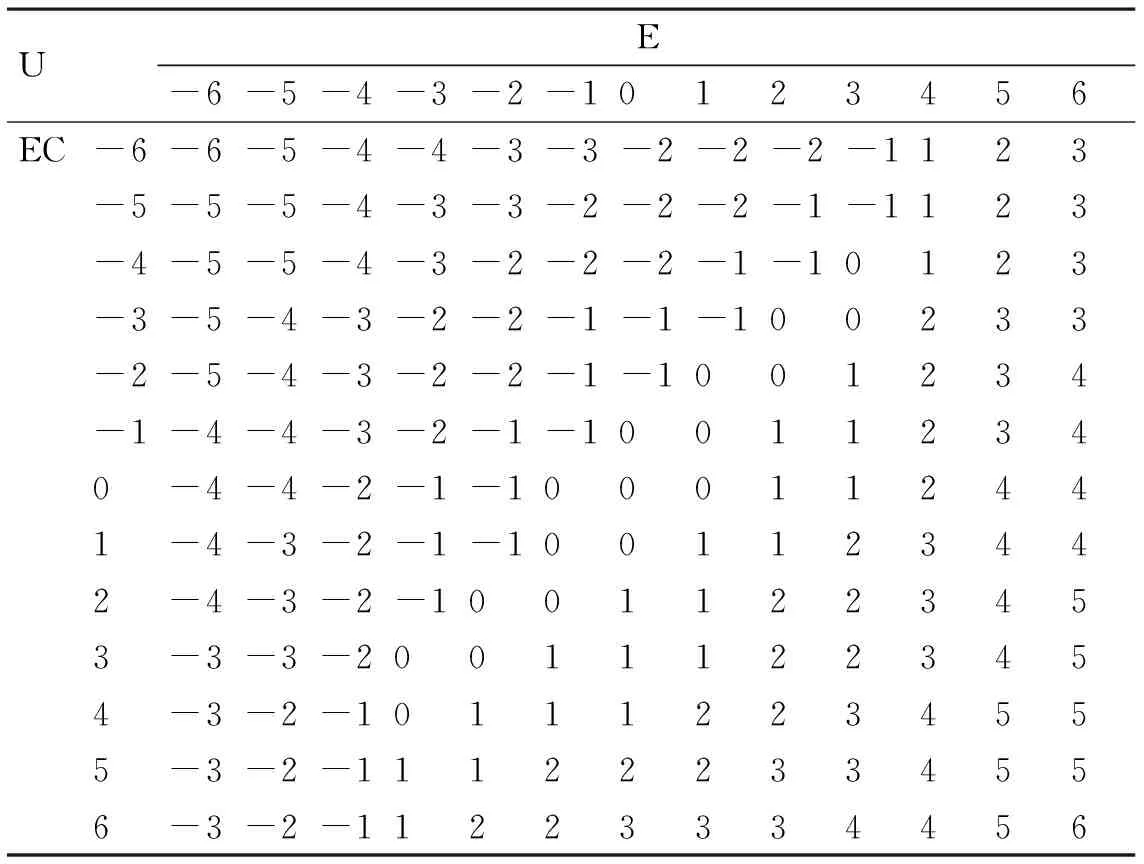
表1 控制规则表
控制的过程是将输入值量化后,查表获得控制量,将控制量转换为电机转速的增加或减少量,按照一定的频度更新输入参数,再次查表获得新的控制量。最终的结果是预测水分值和设定水分值达到一致。
4数值仿真
这里主要是仿真神经网络算法的训练过程、预测过程和电机调整过程的仿真,通过仿真获得这几个过程中的几个重要参数。
4.1训练过程
训练数据90组,包括入口水分、热风温度和电机转速三个输入参数,输出参数为出口水分。输入数据模型参考文献。神经网络采用变学习率学习算法。迭代次数越多,误差越小,但是计算量也随之增大。50次迭代后,神经网络的预测误差和实际的输出误差的关系如图5所示,最终的预测误差为2.99×10-5。能够满足实际系统的需要。
4.2预测过程
在完成训练后,用110组数据对训练好的神经网络进行测试,这里不进行输出参数及电机转速的调整,主要是测试训练参数的准确性。测试的预测输出和模型的输出的关系如图6所示,误差如图7所示,预测误差的标准差为0.0122%。通过测试数据的测试可以看出,神经网络能够较好地根据输入数据对出口处的水分进行预测,预测精度较高。
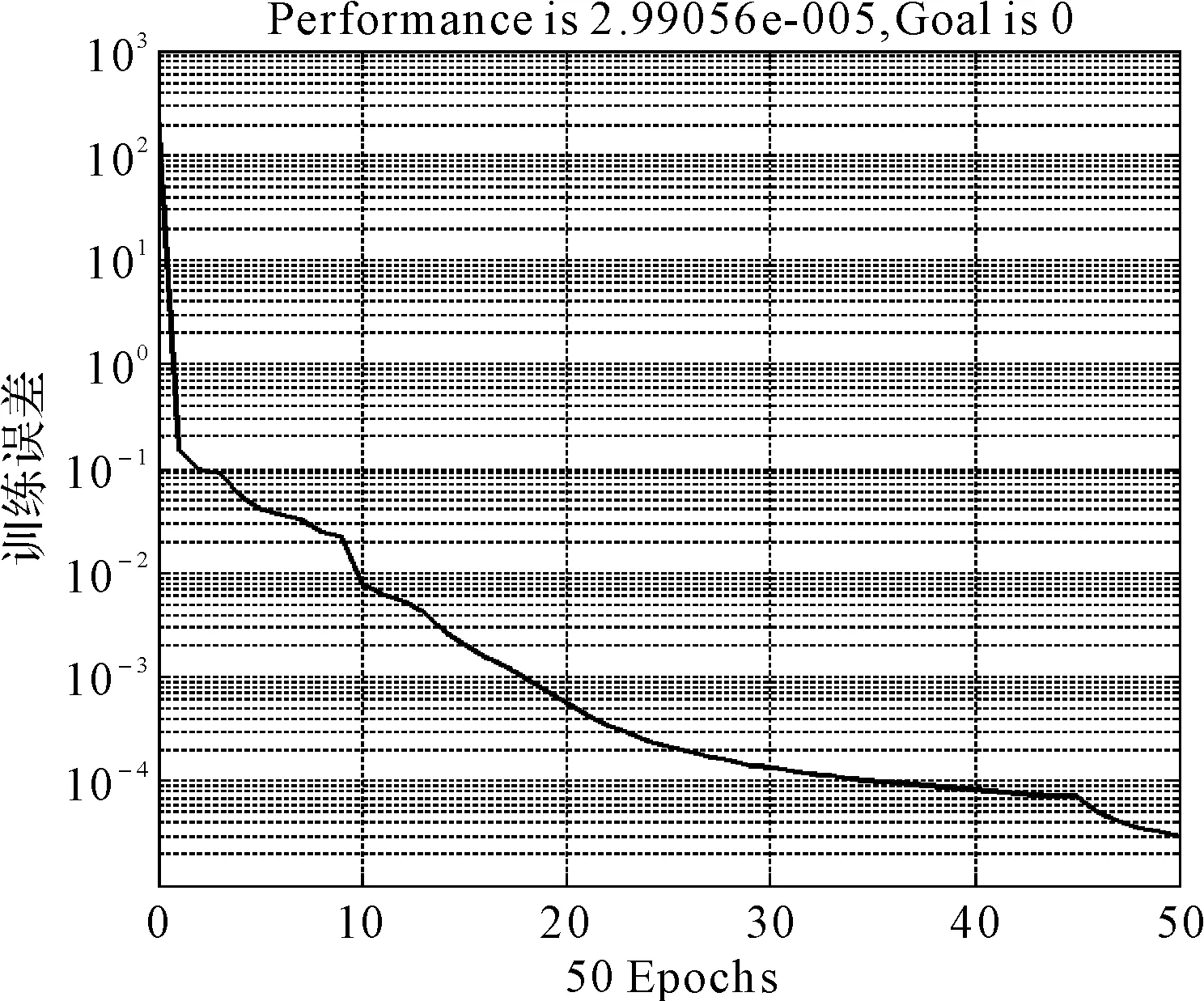
图5 神经网络算法训练误差
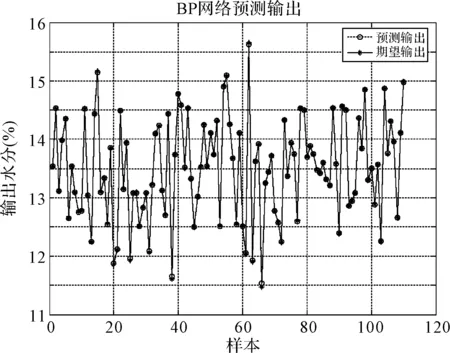
图6 预测输出和模型输出对比

图7 预测输出的误差
4.3对电机的调整
在对神经网络的训练完成后,设定粮食出口处的期望水分值,然后根据输入参数预测当前参数下粮食出口的水分值,然后根据预测值和期望值之间的差作为参数,调整电机的速度,通过多次迭代后,直到将电机的速度调整到使得预测输出和期望输出的差满足要求,这里设定该差值小于0.01%。该方法的一个关键是电机调整的参数,这里采用的是自适应最陡下降法来调整电机的转速。该方法能够根据误差的大小自适应调整步长,在保证收敛速度的同时,保证了最终的精度。
图8为设定出口处粮食水分值为14%时,自适应调整电机转速后的输出水分。图9为6组数据的电机转速调整过程。图10为进行电机调整后,神经网络预测输出值和设定值之间的误差,110组数据的标准差为0.0032%。图11为训练数据长度和误差最大值的关系,从图中可以看出100次训练后,算法就能够达到收敛。从图8~图11中可以看出,以预测水分值和设定水分值之间的差为调整参数,通过自适应算法调整电机转速后,能够使得神经网络的预测值和设定值之间的误差很小。
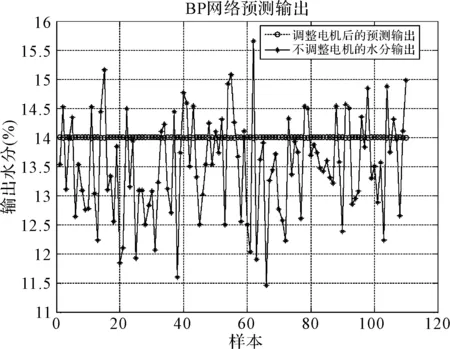
图8 电机调整前后的粮食输出水分值
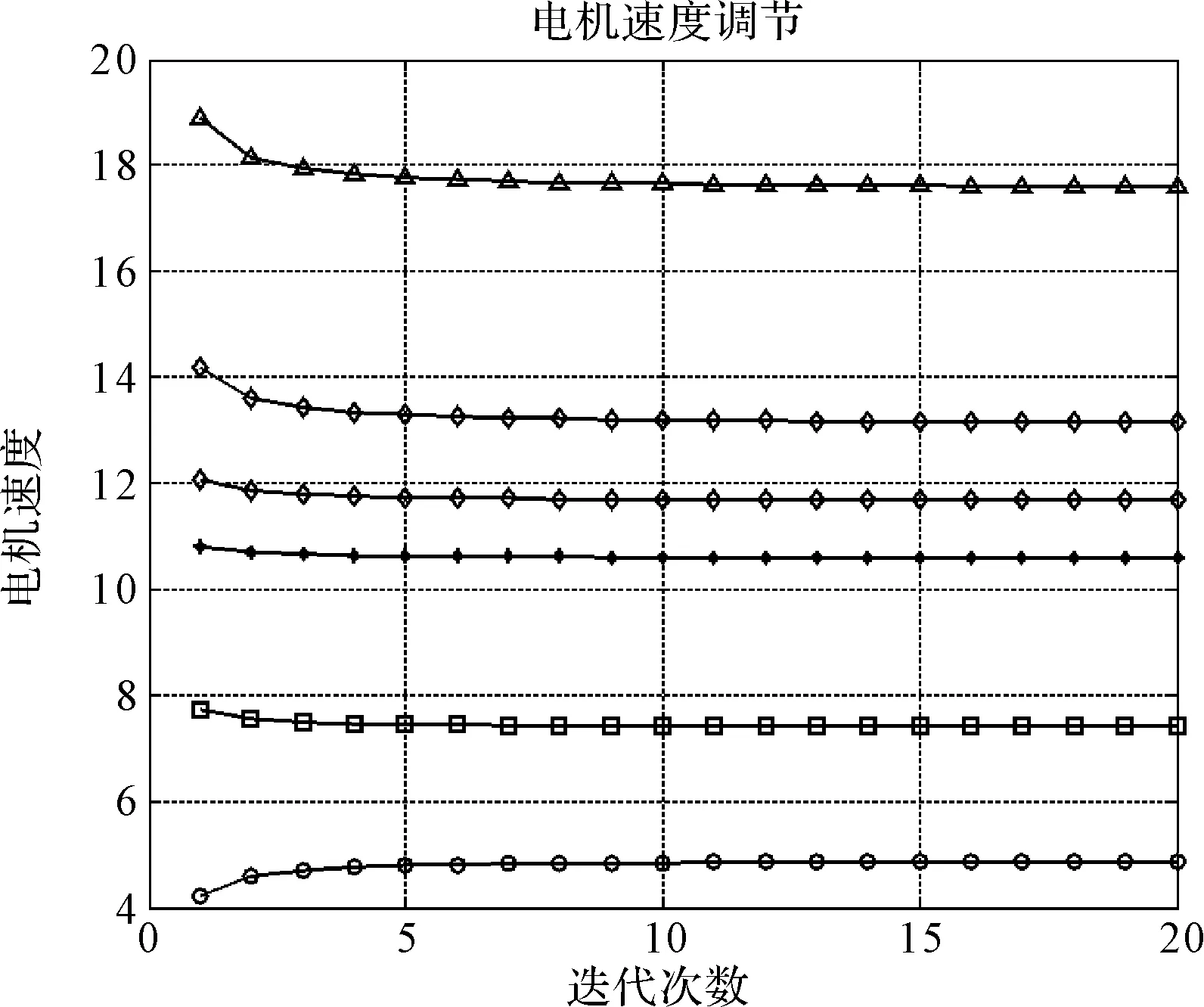
图9 电机转速的调整过程
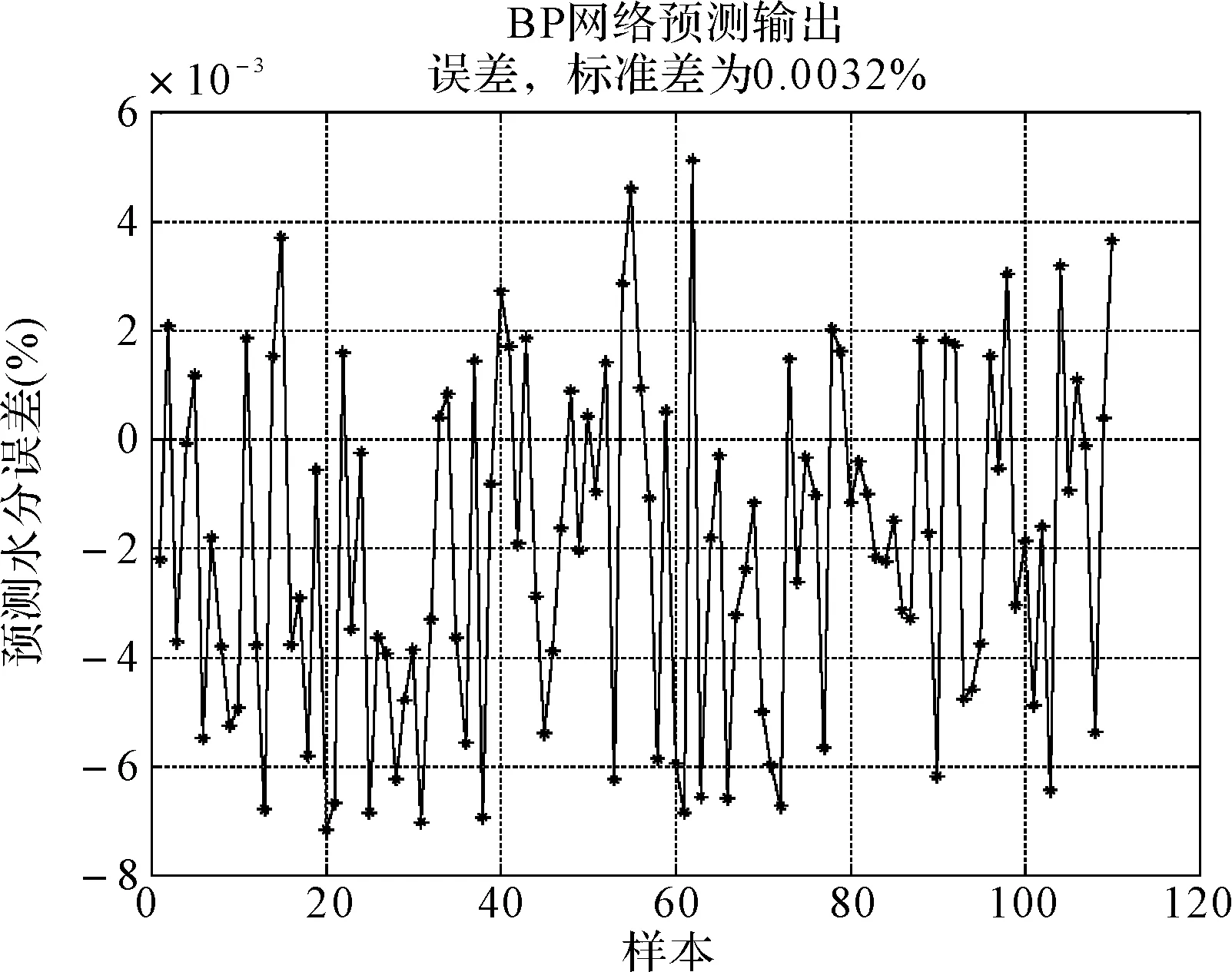
图10 预测输出水分值和设定值之间的误差

图11 训练数据长度和误差最大值的关系
从仿真的结果来看,可以得出以下结论:
1) 神经网络能够根据训练数据对烘干塔进行建模,训练后的预测水分值和根据模型计算的水分值的误差较小,能够满足实际应用的要求。这里虽然采用的是较为简单的线性模型,但是即使采用更高阶的模型,训练的效果也很好(仿真中进行了二阶模型的实验,误差和线性模型相当)。
2) 训练的数据量和迭代次数的要求都不高,运算量不是太大,实际系统能够在较短的时间内实现。
3) 采用自适应算法对电机转速进行调整,能够在较短的时间内获得最佳的电机转速,使得预测水分值和设定水分值之间的误差很小。
神经网络预测的精度高;同时,自适应调整电机后,预测值和设定值的误差小;说明采用上述算法能够实现粮食烘干塔的自动控制。
5结语
神经网络能够通过训练阶段获得网络节点的权值,从而获得粮食出口水分和粮食入口温度、水分、热风温度、传送带速度等因素的非线性拟合函数。当粮食从入口处进入的时候,就可以根据当前的参数预测出这部分粮食在当前的条件下到达出口处的水分,根据预测的水分值和期望的水分只差,采用最陡下降法获得传送带速度的调整参数,通过基于专家知识的模糊控制调整传送带的速度,能够在出口处获得较为理想的粮食水分。
参 考 文 献
[1] 张立辉.谷物干燥过程模拟及测控新方法的研究[D].长春:吉林大学,2014.
ZHANG Lihui. Research on Grain Drying Process Simulation and the New Method for Measurement and Control[D]. Changchun: Jilin University,2014.
[2] 张亚秋.粮食干燥过程水分检测与自动控制[D].长春:吉林大学,2012.
ZHANG Yaqiu. Grain Drying Process Water Detection and Automatic Control[D]. Changchun: Jilin University,2012.
[3] 李丽娜.典型非线性控制系统的智能预测控制研究[D].天津:河北工业大学,2008.
LI Lina. Research on Intelligent Predictive Control of Typical Non-linear Control System[D]. Tianjin: Hebei Industry University,2008.
[4] 周钢霞,崔国华,赵学工,等.一种新型的粮食干燥塔智能控制系统[J].粮食与食品工程,2005,12(3):25-27.
ZHOU Gangxia, CUI Guohua. New Intelligent Control System for Grain Drying[J]. Cereal and Food Industry,2005,12(3):25-27.
[5] 朱德泉,钱良存,骆敏舟.谷物干燥过程模糊支持向量机控制器的设计[J].电子测量与仪器学报,2009,23(4):80-85.
ZHU Dequan, QIAN Liangcun. The Design of the Grain Drying Process Fuzzy Support Vector Machine Controller[J]. Journal of Electronic Measurement and Instrument,2009,23(4):80-85.
[6] 李国昉,毛志怀,齐玉斌.粮食干燥过程控制[J].中国粮油学报,2006,21(2):107-110.
LI Guofang, MAO Zhihuai. Grain Drying Process Control[J]. Journal of the Chinese Cereals and Oils Association,2006,21(2):107-110.
[7] 王士军,毛志怀.连续流粮食干燥控制系统变量分析与结构设计[J].农业机械学报,2009,40(5):115-118.
WANG Shijun, MAO Zhihuai. Variable Analysis and Structural Design on Automatic Control System of Continuous Flow Grain Drying[J]. Transactions of the Chinese Society for Agricultural Machinery,2009,40(5):115-118.
[8] 刘辉,张吉礼.烘干塔智能预测控制系统软件的开发[J].计算机测量与控制,2005,11(9):713-715.
LIU Hui, ZHANG Jili. Software Development of the Grain Dryers Intelligent Prediction Control[J]. Computer Measurement and Control,2005.11(9):713-715.
[9] 刘淑荣,于枫.模糊专家系统在粮食烘干控制过程中的应用[J].现代电子技术,2005,11:64-66.
LIU Shurong, YU Feng. Application of Fuzzy Expert System in Control of Foodstuff Drying[J]. Modern Electronic Technology,2005,11:64-66.
[10] 刘建军,王振涛.粮食烘干塔测控系统的研究[J].粮油加工与食品机械,2005,1:67-69.LIU Jianjun, WANG Zhentao. Research of the Grain Dryers measurement and control system[J]. Machinery for Cereals Oil and Food Processing,2005,1:67-69.
收稿日期:2016年1月10日,修回日期:2016年2月20日
基金项目:河南省科技攻关项目“粮食烘干塔智能控制系统开发”资助。
作者简介:刘拥军,男,博士,讲师,研究方向:信息与通信工程。董春宵,女,硕士,讲师,研究方向:电子科学与技术。杨斌,男,硕士,讲师,研究方向:电子科学与技术。高博,男,博士,副教授,研究方向:信息与通信工程。
中图分类号TP273.9
DOI:10.3969/j.issn.1672-9722.2016.07.018
Intelligent Control System of Grain Drying Based on Neural Network
LIU YongjunDONG ChunxiaoYANG BinGAO Bo
(PLA Information Engineering University, Zhengzhou450000)
AbstractGrain drying process is a typical nonlinear, multi variable, large lag, parameter associated coupled unsteady heat transfer and mass transfer process. According to this problem, the intelligent control system based on neural network and fuzzy control algorithm is designed. The simulation results show that, after a period of training, neural network algorithm can be used to study the parameters of drying process, combined with fuzzy control algorithm to achieve automatic control of grain drying process, so that the drying of grain to achieve the set of water value.
Key Wordsdrying tower, neural network, fuzzy control, intelligent control
猜你喜欢
电子制作(2019年19期)2019-11-23
电子技术与软件工程(2016年20期)2016-12-21
求知导刊(2016年30期)2016-12-03
科学与财富(2016年28期)2016-10-14
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
重型机械(2016年1期)2016-03-01
大连工业大学学报(2015年4期)2015-12-11
电源技术(2015年11期)2015-08-22
