
玻璃幕墙清洗机设计
2016-08-10 03:34:26王命国杨菲宇李腾飞袁作彬
大科技 2016年27期
王命国 杨菲宇 李腾飞 袁作彬
玻璃幕墙清洗机设计
王命国 杨菲宇 李腾飞 袁作彬
(湖北民族学院理学院 湖北恩施 445000)
用阀门杆、弹簧、吸盘制作出特制吸盘,特制吸盘能在吸附时自动排出空气处于吸附状态,在不需要吸附时可以自动进气让其失去吸附力。多个吸盘同时吸附玻璃来保证有足够的吸附力支持机器,履带轮在行驶时吸盘交替的进行吸附玻璃与离开玻璃。6排清洗刷进行一级旋转清理,再用4排刮水装置刮掉清洗后的水及其他污物,最后用6排吸水柱将擦洗过的玻璃上的水吸干。
多吸盘;履带;玻璃幕墙;清洗
引言
伴随着我国建筑业的快速发展,玻璃幕墙的应用也越来越广泛[1~2]。玻璃幕墙对建筑物能够起到良好的装饰作用,但不耐污染。
1 机体总体方案设计
清洗机包括运动系统、清洗系统、控制系统三大系统。整体结构图如图1所示,整体结构长宽高为1150mm×900mm×180mm,加装12.3kg清洗液后总重量约为60kg。该机器有3根横梁支架,所有的器件均直接或间接安装在3根横梁支架上;清洗部分由6排清洗刷、4排刮水器和6排吸水柱三部分组成,16根清洗工具均安装在清洗支架上,每根清洗支架由3根连接杆套上压力弹簧后安装在横梁支架上。存放清洗液的水箱和电源控制箱安装在3根横梁支架之间;清洗液通过喷水器喷洒于玻璃幕墙上,在横梁支架上安装有3个安全环,本机器在玻璃幕墙上行驶可以不使用安全绳,从安全方面考虑加上安全绳后更保险。每个横梁支架均有6颗螺栓与履带轮相连,履带轮上安装有特制吸盘。
2 工作原理
2.1 运动系统
运动系统为装有特制吸盘的两条履带轮。运动电机带动传动轮转动,传动轮再带动履带转动,固定在履带上的吸盘跟随转动。履带轮在行驶时吸盘交替的进行吸附玻璃与离开玻璃,达到在玻璃幕墙上行驶的目的。
2.1.1 履带轮介绍
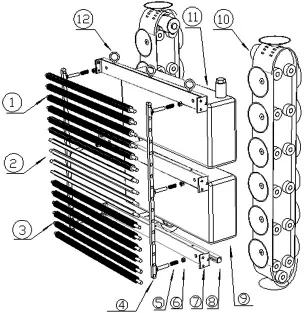
图1 整体结构图
履带轮为本机器的重要器件,考虑到玻璃幕墙表面平整光滑的特点,所以采用吸盘吸附的方法,单一吸盘能提供的吸附力有限,所以需要用多个吸盘同时工作才能与整机的重量平衡,最终决定把特制吸盘固定在履带轮上,利用履带轮的长度优势,使得多个吸盘能同时处于吸附状态。在履带上安装有14个直径为105mm的特制吸盘,履带轮的后端安装有两块起阀块,用于特制吸盘离开时打开吸盘,让吸盘进气。
2.1.2 特制吸盘介绍
该吸附装置由普通吸盘、弹簧、阀门杆三部分组成,如图2所示。吸盘用丁腈橡胶制造,边缘很柔软,能紧贴附于玻璃表面上而形成密封内腔[3]。工作原理:当特制吸盘在接触玻璃时履带轮对吸盘挤压,阀门被气体压开,气体被排出,排出后弹簧给阀门一个压力使阀门与吸盘封闭,保证吸盘内部处于负压状态,并紧紧的吸附在玻璃上,当需要让吸盘离开玻璃时,履带轮继续运动,通过固定在履带轮上的起阀块将特制吸盘上的阀门抬起,起阀块共有两块,均固定在履带轮上,当吸盘跟随履带运动到安装有起阀块的位置时,两块起阀块插到①与②中间将阀门杆抬起,吸盘阀门被打开,气体进入吸盘内,从而使吸盘失去吸附力离开玻璃。
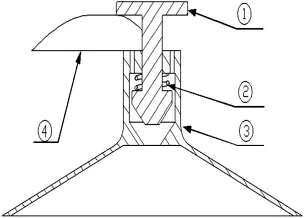
图2 吸盘结构图
①-阀门杆;②-弹簧;③-普通吸盘;④-起阀块。
2.1.3 安全性校核
当机器在玻璃上爬行时,可能出现两种危险情况:①最上方接触的吸盘由于受倾翻力矩太大脱离玻璃,引起机器的倾翻;②清洗机从墙面上滑下。下面验证其安全性:
(1)清洗机不会倾翻
如图3,清洗机不倾翻的力学条件是:
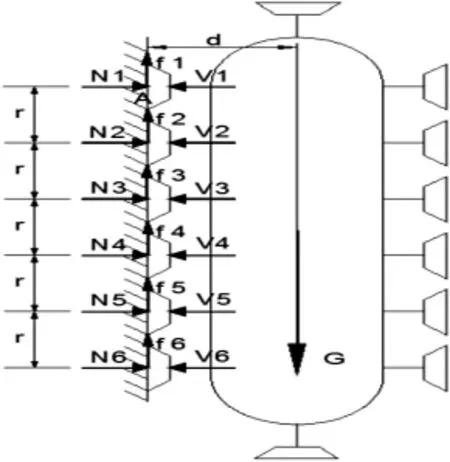
图3 整体受力分析
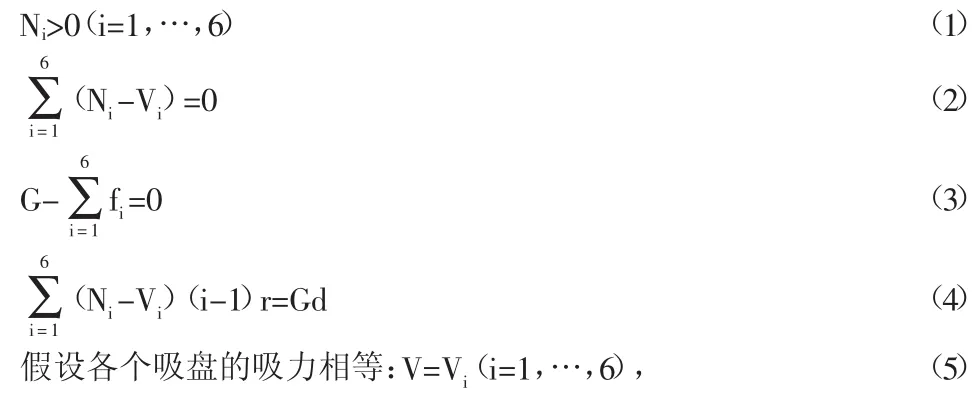
为方便计算Ni,假设作用于吸盘上的支撑力形成平行力系,并且从N1~N6比例增加,以上假设表达式为:


吸盘吸附力的计算公式[5]如下:

式中:S-吸盘面积,以 cm2表示;P-气压,以 kg/cm2表示;λ-安全系数
吸盘直径D=105mm,安全系数λ>=2,吸盘的真空度约为0~70kPa[6],真空度按50kPa=0.5kg/cm2。吸盘的吸力为:
(2)清洗机不可能从墙面滑下
清洗机不从墙面滑下的力学条件是:最大静摩擦力大于滑动摩擦力。所以有:

式中:μ-最小摩擦系数;N-接触面的正压力。由公式(6)(7)可知,Nmin=N1,于是:

玻璃与吸盘的摩擦系数μ=0.3[7~8],摩擦力为:

在运行时共有12个吸盘同时工作,所以最后总摩擦力为:

这表明:清洗机不可能从墙面滑下,同时也说明,清洗机能在玻璃幕墙上能安全行走。
2.2 清洗系统
清洗部分位于水箱和电源控制箱的下面,如图1所示。通过6根连接杆与横梁支架相连。在连接中套以弹簧提供清洗时所需的压力,保证清洗装置与玻璃幕墙的压力恒定。清洗部分分为喷水管、清洗刷、刮水杆、吸水柱四部分,清洗步骤:首先喷水器喷出适量清洗液于待洗玻璃上;其次6排穿制猪鬃的圆柱型尼龙筒由电机带动转动清洗,采用4排类似于汽车雨刷的刮水器将清洗后留在玻璃上的水或其他污物进行刮除;最后采用6排由吸水海绵包裹连杆制成吸水柱吸水,目的为吸干清洗后所残留的水。
2.3 控制系统
控制系统安装在机器的控制箱内,由单片机、继电器、摄像头、无线传输模块等构成。采用无线遥控,并设有自动和手动两种可选控制模式。
3 结束语
将履带轮与吸盘相结合,用阀门杆、弹簧、吸盘制作为特制吸盘的清洗机,能自动清洗玻璃。装置简单,安全可靠,可改善工人的劳动环境,提高劳动生产力,具有广阔的应用前景。
[1]李哲.论我国玻璃幕墙的发展现状及前景[J].现代装饰(理论),2015(3):253~254.
[2]玻璃幕墙的优缺点简介[J].建材发展导向,2015(4):107.
[3]高正立,倪尚文.吸盘式圆规设计[J].机械科学与技术,1994(2):31~33.
[4]孟宪超,王祖温,等.一种多吸盘爬壁机器人原型的研制[J].机械设计,2003(20):8.
[5]浅谈真空吸盘的吸力计算方法[EB/OL],2014,11:2013.
[6]赵维福.龙虱吸盘的仿生学特性及其真空吸盘组的仿真模拟研究[D].吉林:吉林大学,2006.
[7]李庆阳.玻璃材料的摩擦磨损性能测试及其装置的研究[D].哈尔滨:哈尔滨工业大学,2015.
[8]翁晓龙.柔性材料的表面设计及其粘附特性的研究[D].南京:南京航空航天大学,2015.
TU227
A
1004-7344(2016)27-0236-02
湖北民族学院2015年大学生创新项目(2015Z012);湖北民族学院教学研究与改革项目(No.2009JY028)。
2016-9-12
王命国(1994-),男,大学生,机械电子工程专业学生。
袁作彬(1966-),男,副教授,主要从事机械设计研究。
猜你喜欢
英语世界(2023年11期)2023-11-17 09:24:24
船海工程(2022年6期)2023-01-02 13:05:12
机电工程(2020年10期)2020-11-04 01:29:46
动漫界·幼教365(大班)(2020年5期)2020-09-06 13:54:23
石家庄铁道大学学报(自然科学版)(2020年4期)2020-02-22 01:39:48
科教新报(2019年27期)2019-09-10 07:22:44
铁道通信信号(2019年3期)2019-04-25 03:00:38
工业设计(2016年6期)2016-04-17 06:42:45
设备管理与维修(2016年6期)2016-03-16 02:21:58
减速顶与调速技术(2015年3期)2015-03-16 03:39:10
