
基于MRAS的无速度传感器直接转矩控制研究
2016-08-09 05:43:15天地科技股份有限公司李建华
电子世界 2016年13期
天地科技股份有限公司 李建华
基于MRAS的无速度传感器直接转矩控制研究
天地科技股份有限公司 李建华
【摘要】本文给出了一种基于模型参考自适应智能控制方法的无速度传感器直接转矩控制方法,解决了DTC系统速度反馈信号易受传感器的安装精度、检测精度和环境变化等多种复杂因素干扰的问题。通过分析电机数学模型,应用MRAS方法获得电机速度的实时参数,从而实现对电机速度的准确调控。通过Simulink仿真验证了理论分析的正确性。
【关键词】MRAS;无速度传感器;直接转矩控制
1 概述
上世纪80年代,以电压源型PWM逆变器为控制对象,德国学者M.Depenbrock提出了一种先进的标量控制技术,该技术为直接转矩控制技术(DTC)。经过长期实践证明,该技术对于传动系统的调速性能可以与矢量控制相媲美。其基本控制原理是:通过查表的方法来选择合适的空间电压矢量,从而实现传动系统转矩和磁链直接准确的控制。
随着科学技术的发展,DTC技术在高性能调速系统中扮演越来越重要的角色,在工业现场应用中,速度传感器的灵敏度和准确度易受外部环境因素的影响,不仅给安装带来困难,更会影响传动系统的稳定工作,造成系统调速失败。因此,无速度传感器直接转矩控制技术逐渐成为传动系统调速控制领域的研究热点,该技术利用检测到的电机电压和磁链,通过电机数学模型,准确推算出电机的实时转速,有效的解决了速度传感器易受环境影响的问题,改善了传动系统的动态性能,增加了系统工作的稳定性。
2 异步电机数学模型建立
在异步电机的动态过程中,其数学模型是一组时变的非线性联立微分方程,矩阵式数学模型通常用旋转磁场坐标系来表示,符号为M-T。旋转坐标与静止坐标的差别在于转差角,因此可以用电机的固有参数和转差角速度和同步角速度来表示电机的数学模型,即:
对比异步电机的矩阵数学模型,状态空间形式的数学模型更方便调速系统的而控制,由式(1)和(4)可知,异步电机具有1阶运动方程和4阶电压方程,所以其状态空间模型是5阶的,需要5个状态变量,共有转速、4个磁链变量和4个电流变量共9个变量可供选择,其中转速是必须选取的变量,由于转子电流励磁和转矩分量是不易测量的,故其不宜用来作为状态变量,因此,只能选择定子电流和定子磁链作为状态变量。所以,状态变量为:
结合状态变量和转矩方程将式(2)中的磁链矩阵转换为磁链方程组:

上式中的第3、4两式可写为:
将式(6)带入式(1)中可得:

将(6)式带入(3)式得电磁转矩输出方程:

将式(5)带入式(7)经整理后可得到状态方程:

(9)
上式中为电动机的漏磁系数;为转子电磁时间常数,在式(9)的状态方程中,输入变量为:
依据异步电动机在M-T轴上的数学模型,可以得到异步电机的动态等效电路,如图1所示。
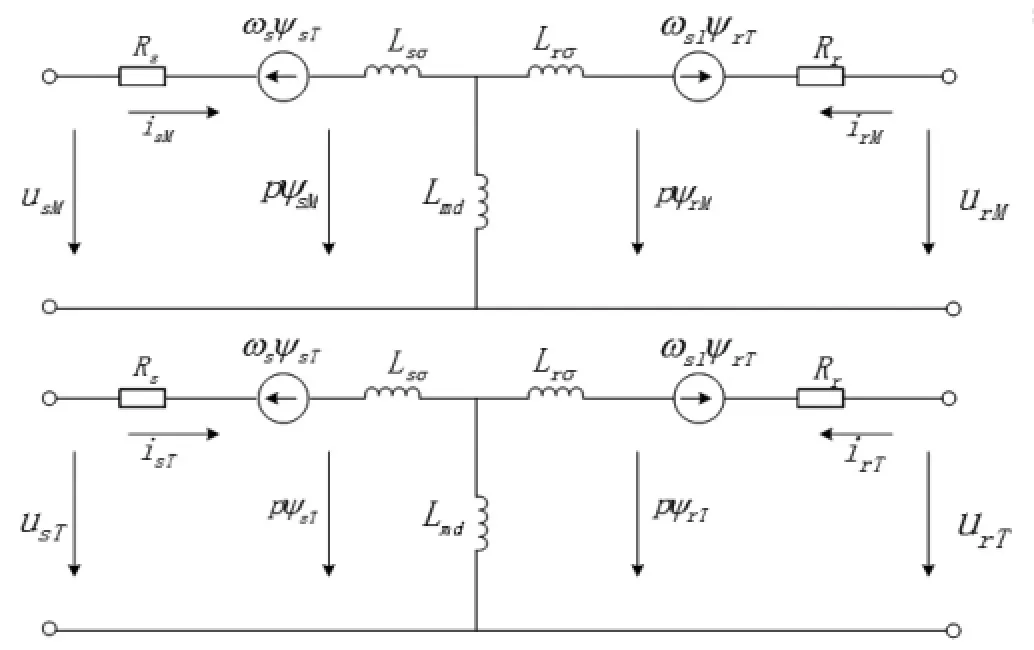
图1 异步电动机在M-T轴系上的动态等效电路
3 基于MRAS的无速度传感器DTC系统设计
模型参考自适应理论对于参数辨识的主要思想是将已有的固定的方程作为参考模型,而将含有待估参数的方程作为可调模型,两个模型的输出量具有相同的物理意义,利用两个模型产生的输出量误差构成正确的自适应率来对可调模型的参数进行实时调节,以达到使输出对象跟踪参考模型的目的。其推导如下:
静止坐标系下的转子磁链方程为:

据此构造参数可调的转子磁链估计模型为:

假定估计模型中需要辨识的量是变化的,其他参数不变。式(10)和式(11)可简写为:


式中:

定义误差状态为:

用式(13)减去式(12)可得:

根据自适应稳定性理论,取比例积分率可以推得辨识角速度公式为:
算法辨识框图如图2所示,这种方法在计算角速度的同时,也可以传递转子磁链的信息。
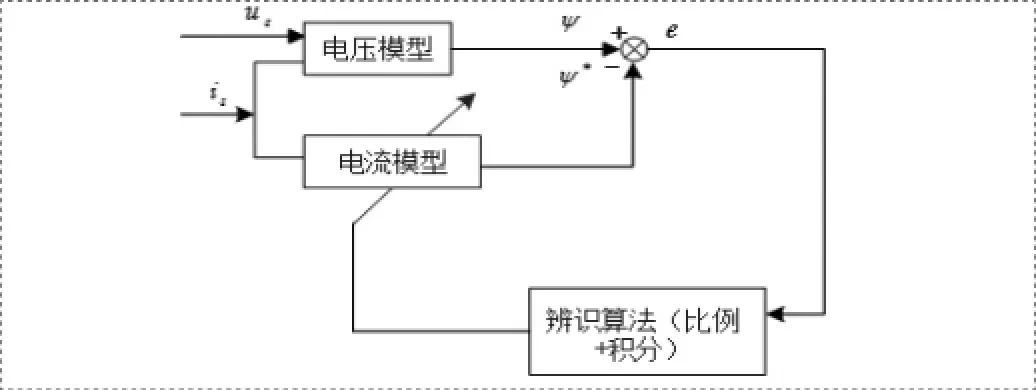
图2 模型参考自适应角速度辨识算法框图

图3 空载下零速-额定转速-零速变化时电机响应图
4 仿真分析
从图3和4中可以看出,在空载条件下,基于模型参考自适应控制的无速度传感器直接转矩控制系统对于异步电机零速-额定转速-零速的调速性能可以达到理想的调速指标,调速精度满足实际要求。
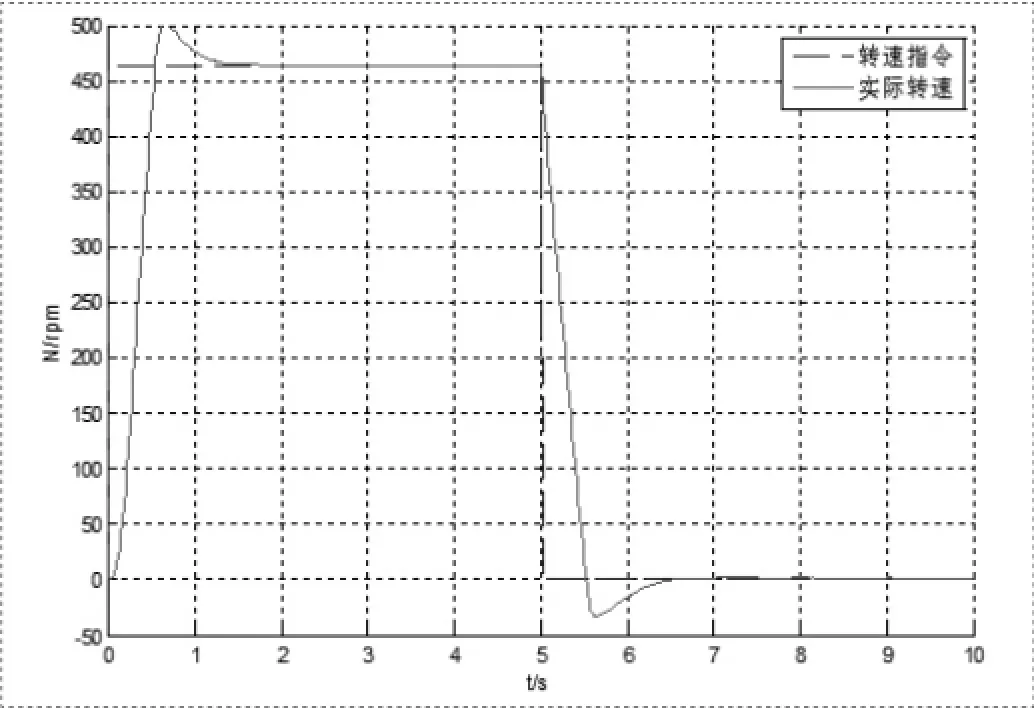
图4 空载下零速-典型速度-零速变化时的电机实际转速和转速指令的比较
5 结语
本文通过对异步电机的状态空间模型进行分析,运用模型参考自适应方法对电机参数进行实时监测和控制。详细分析了无速度传感器直接转矩控制系统较直接转矩控制系统的优势,实现了在无速度传感器反馈的条件下对异步电机的转速和磁链的准确观测,解决了异步电机调速系统稳定性受环境因素影响大的问题,有效的提高了系统的调速性能。
参考文献
[1]陈伯时.电力拖动自动控制系统[M].北京:机械工业出版社,1992.
[2]王成元,周美文,郭庆鼎.矢量交流伺服驱动电动机[M].北京:机械工业出版社,1993.
[3]冯垛生,曾岳南.无速度传感器直接转矩控制原理与实践[M].北京:机械工业出版社(第2版),2006.
[4]曾岳南,陈伯时.异步电动机无速度传感器的直接转矩控制[J].电气传动自动化,2000(4).
[5]王成元,夏加宽,杨俊友,等.电机现代控制技术[M].北京:机械工业出版社,2006.
[6]杨耕,陈伯时.交流感应电动机无速度传感器的高动态性能控制方法综述[J].电气传动,2001(3).
[7]YOUNG AHN K,SUNG HWAN K.A new scheme for speedsensorless control of induction motor[J].Industrial Electronics,IEEE Transactions on,2004,51(3):545-50.
[8]YANG G,CHIN T H.Adaptive-speed identification scheme for a vector-controlled speed sensorless inverter-induction motor drive[J]. Industry Applications,IEEE Transactions on,1993,29(4):820-5.
作者简介:
李建华(1978—),男,内蒙古人,工学学士,工程师。
