
Parker运动控制器在定位装配试验机上的应用
2016-08-08 09:42:17姬战国袁庆一
工程与试验 2016年2期
关键词:试验机
姬战国,袁庆一,未 来
(长春机械科学研究院有限公司,吉林 长春 130103)
Parker运动控制器在定位装配试验机上的应用
姬战国,袁庆一,未来
(长春机械科学研究院有限公司,吉林 长春 130103)
摘要:介绍了Parker多轴运动控制器的结构组成、功能特点及在定位装配试验机上的应用。
关键词:运动控制器;定位装配;试验机
1概述
在现代化工业机床控制及精密定位装配过程中,控制系统的精度、控制的稳定性是十分重要的,对控制器的性能、功能要求是很高的。工程实践证明,Parker运动控制器ACR9000是一款性价比高、容易使用、功能强大的运动控制器。
2ACR9000控制器
ACR9000控制器是Parker公司最先进的多通道独立式运动控制器,可控制1到8轴。便利的接口形式和高性能的通信能力使ACR9000具有很高的灵活性,可用于不同的高速、高精度的自动化机器装备上。作为独立式控制器,功能强大的高速DSP(150/75MHz)使ACR9000完全胜任多任务伺服控制。ACR9000能够与不同品牌的伺服驱动器和不同品牌的PLC进行良好接口。ACR9000还包括了一个容易使用的开发工具,使用户可快速、高效地完成应用程序开发和设备的维护。
(1)ACR9000接口
ACR9000接口示意图如图1所示。
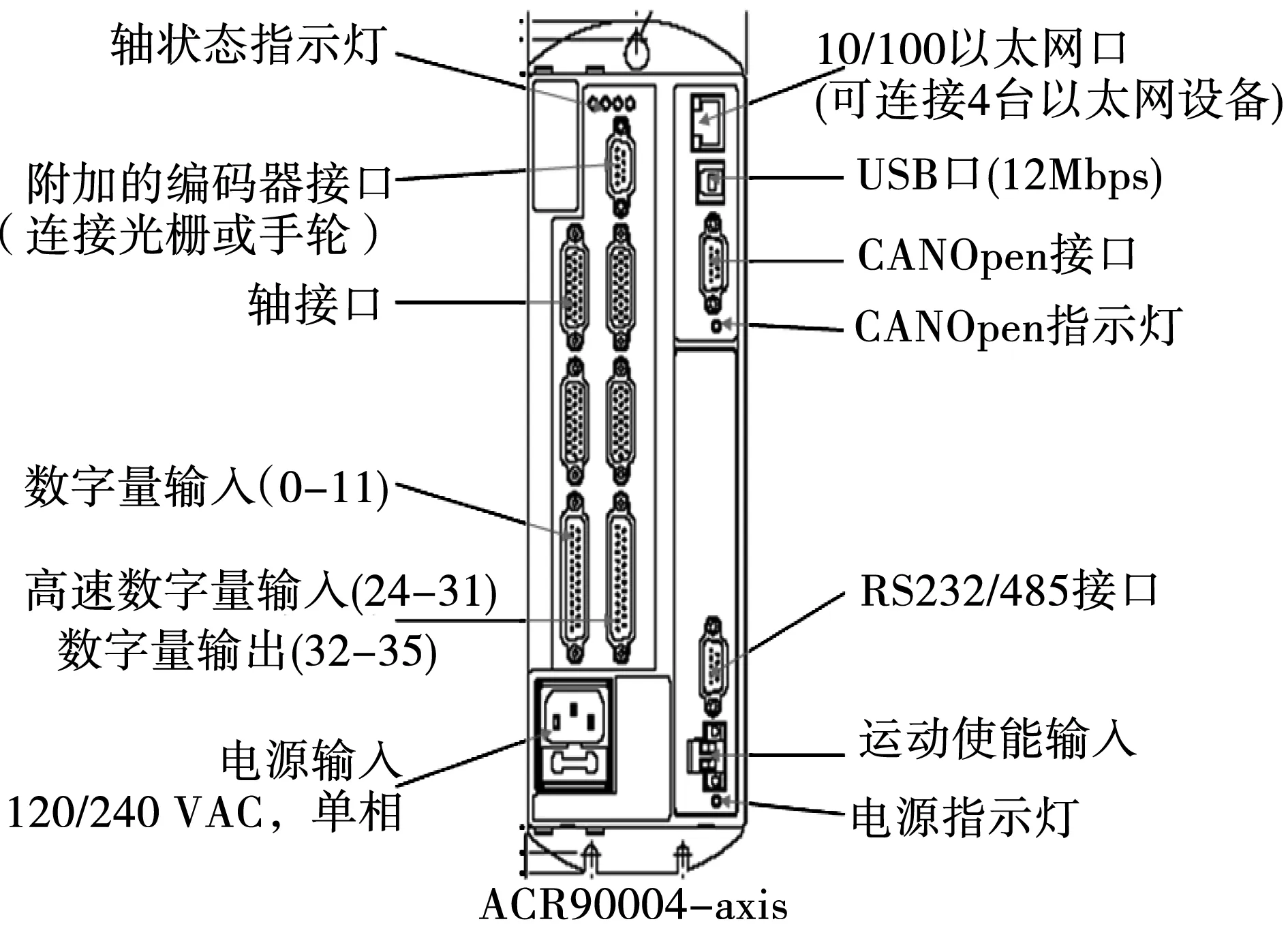
图1 ACR9000接口示意图
(2)ACR9000的特点
控制轴数:1-8轴。
处理器:32位浮点运算DSP。
用户存储区:1MB闪存,用于保存用户的程序和设置的参数。
操作系统:多任务实时操作系统。
伺服环:PID,速度前馈,加速度前馈,Notch和低通滤波。
串行接口:1个串行端口(RS232 and/or RS422)。
Ethernet:10/100Base-T,USB:2.0。
模拟输出:可输出8路,16位模拟量。
步进输出:可输出8路,最高频率2.5MHz。
编码器输入:可输入10路正交编码器信号,20MHz。
步进和方向,CW/CCW模式内置数字I/O:2到4轴内置20点24V DC光隔离输入,4点24V DC光隔离输出。
开发软件:ACR-View软件开发包,动态链接库支持C++,VB6,C#,VB.NET。
ACR系列运动控制器可以同时执行16段Program程序及8段PLC程序。
可以同时运行8段PLC程序,主要完成BIT位的逻辑处理。
每段PLC程序最多可支持8个计数器功能块,8个定时器功能块,8个BIT位锁存功能块。
3ACR9000的应用
研制的定位装配试验机主要用来进行两个形状相同的大尺寸异型件的套装试验,要保证工件可在一个平面内进行横向、竖向、旋转精确定位运动,通过应用ACR9000三轴运动控制器来控制交流伺服系统,其中两轴作直线运动,第三轴作圆周运动。直线运动反馈元件为高精度光栅尺,圆周运动反馈元件为高精度光电编码器。通过上位机ACR_View软件设置参数,对Parker控制器中相关参数进行设置,如通信方式;控制方式:速度DAC模拟量输出、位置控制差分脉冲信号输出;伺服驱动器、伺服电机型号;反馈元件的信号形式,测量精度;传动系统相关参数,伺服PID控制参数,限位保护参数;JOG调试运行。设置好参数后,存储到控制器中,安全可靠。控制系统组成如图2所示,控制软件界面见图3。
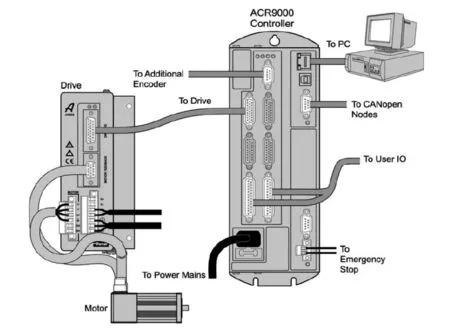
图2 控制系统组成示意图
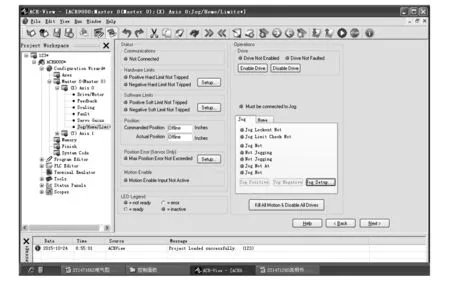
图3 控制软件界面
在应用中,成功测试了速度控制及光栅反馈闭环方式、速度控制及电机编码器反馈闭环方式和位置控制定位方式,取得了较好的效果。通过几种控制方式比较,速度控制和外接分辨力1μm的直线光栅尺作为反馈传感器效果最好,控制精度高,重复精度高,是最理想的控制方式。在应用中,应注意以下几点:
(1)必须为控制器的信号控制端(Enable Input,位于控制器的右下角,RS-232接口下面)提供一个24V的直流电源,才能使控制器控制电机的运动。
(2)电机飞车问题的解决。当控制器采用模拟量控制伺服系统时,如果控制器接收到的编码器极性反了或接收不到编码器信号,都会引起电机飞车。当出现飞车时,首先要确认控制器是否能读到编码器输入,在伺服环监视面板“Actual Position”中查看是否有编码器输入。如读不到数值,则要查看编码器连线是否正确。如果能读到编码器读数,且编码器读数与实际位置相反,跟随误差越来越大,则应该是编码器极性接反了造成的,相当于形成了正反馈。在轴配置中的位置环反馈中把编码器极性反向即可解决问题。设定与反馈值显示框图如图4所示。
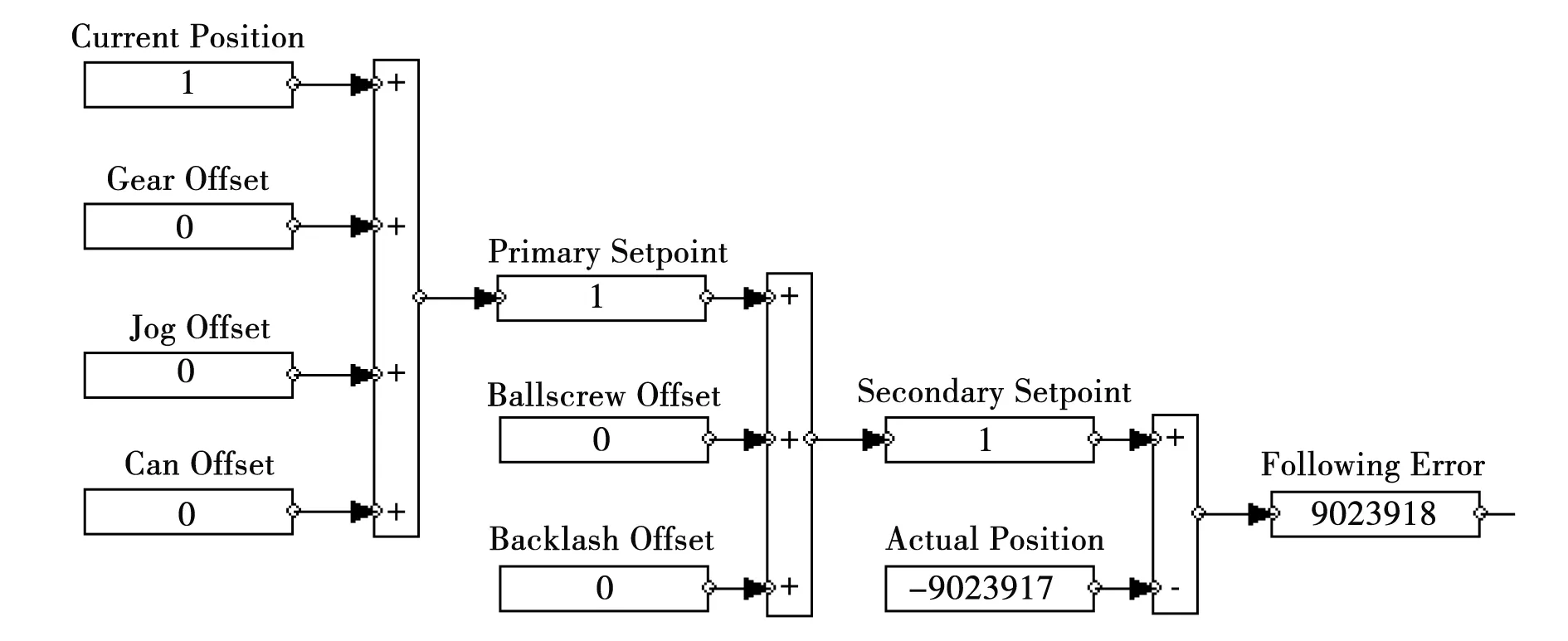
图4 设定与反馈值显示框图
(3)控制的PID参数
PID参数调试非常关键,直接影响控制品质。在伺服增益面板“Servo Gains”可直接通过控制曲线图进行PID参数的调节设置,如图5所示。
4结束语
该项目成功应用Parker运动控制器进行伺服控制,通过大量试验,测试其控制定位精度、定位重复性、控制稳定性、连续运行的可靠性,均取得了较好的试验效果。同时,更深入地了解了其方便的PLC通信控制、多轴控制程序的应用,为该控制器在运动控制上的进一步应用奠定了基础。
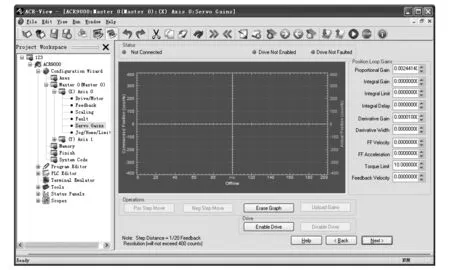
图5 PID调试窗口
参考文献
[1]郗志刚,周宏甫.运动控制器的发展与现状[J].电气传动自动化,2005,(03).
[2]ACR9000 Series Hardware Installation Guide[Z].2011.
[3]邓志君,梁松峰,等.基于RS485接口Modbus协议的PLC与多机通讯[J].微计算机信息,2010.
[收稿日期]2016-06-22
[作者简介]姬战国(1974-),男,高级工程师,主要研究方向:自动控制。
中图分类号:TP342+.3
文献标识码:B
doi:10.3969/j.issn.1674-3407.2016.02.016
Application of Parker Motion Controller to Position Adjust Testing Machine
Ji Zhanguo, Yuan Qingyi, Wei Lai
(Changchun Research Institute for Mechanical Science Co., Ltd. Changchun 130103, Jilin, China)
Abstract:The structure and function of Parker Motion Controller are introduced in the paper, and the application of the controller to the position adjust testing machine is described.
Keywords:motion controller; position adjust; testing machine
猜你喜欢
哈尔滨轴承(2021年1期)2021-07-21 05:43:12
哈尔滨轴承(2020年2期)2020-11-06 09:22:30
哈尔滨轴承(2020年2期)2020-11-06 09:22:28
哈尔滨轴承(2020年1期)2020-11-03 09:16:08
哈尔滨轴承(2020年1期)2020-11-03 09:16:08
电子测试(2018年6期)2018-05-09 07:32:28
橡胶工业(2015年2期)2015-07-29 08:29:50
橡塑技术与装备(2015年7期)2015-07-03 12:17:50
河南科技(2014年10期)2014-02-27 14:09:20
城市道桥与防洪(2013年8期)2013-03-11 15:18:32
