
仿生水下航行器的设计分析
2016-08-08 09:44:21曾思远王煜天
工程与试验 2016年2期
关键词:仿生设计
曾思远,王煜天
(1.吉林大学机械科学与工程学院工业工程系,吉林 长春 130000;2.长春理工大学机电工程学院,吉林 长春 130000)
仿生水下航行器的设计分析
曾思远1,王煜天2
(1.吉林大学机械科学与工程学院工业工程系,吉林 长春 130000;2.长春理工大学机电工程学院,吉林 长春 130000)
摘要:面对海洋探测等领域对水下航行器的迫切需求,本文对当前水下航行器的现状和分类进行了分析,在此基础上结合仿生学方法,以水下鲸目动物为模板,设计建立了仿生水下航行器三维模型,基于流体动力学仿真软件对航行器机身与关键结合部位的压强、流线分布等力学特性进行了分析研究,研究工作对水下航行器设计优化具有借鉴意义。
关键词:海洋探测;水下航行器;仿生设计;流体分析
1引言
随着人类对海洋探索的不断深入,水下航行器作为人类认识海洋、监测海洋、管理海洋的重要途径,相关研究愈发受到国内外关注[1]。
典型的水下航行器分为自主航行器(AUV)和遥控航行器(ROV)两类[1-2]。其中,AUV不需人操纵,能相对长距离地工作,而ROV是通过连接于水面指挥船的缆绳提供动力和遥控操纵的。通过模拟自然界中生物的结构、功能来改进工程系统的设计,一直是国内外水下航行器研究的热点。鱼类作为水下生物,具有优异的水动力学特性。基于鱼类结构开展水下机器人仿生设计分析,对其改善减阻、降噪特性,具有重要的理论意义和应用价值[2--4]。
2CFD模拟湍流模型
根据相对运动原理,可视水下载具的流体外形为静止,水流以速度-U0流向载具体。在定常假设的前提下,对N-S方程进行雷诺平均,假定流体是不可压的,可得流场的连续方程和动量方程为[2-3]
(1)
(2)

3仿生水下航行器的设计分析
水中的鲸目动物身体呈纺锤形或流线型,以鲸鱼最具代表性。鲸鱼的尾鳍退化,与脊柱一起完成摆动运动,前鳍则具有水平舵功能,配合尾鳍改变身体姿态,并保持平衡。考虑到本文设计的水下航行器尺寸要精巧且便于加工,因此对前鳍部分做了必要的简化处理。基于上述原则,本文采用三维造型软件对仿生水下航行器进行了三维建模,如图1所示,其中航行器总长750mm,为整体结构的最大尺寸。

图1 仿生水下航行器三维模型
在仿生水下航行器流体动力学特性分析中,为了消除外流场的边界效应,计算流场边界要大于航行器极限尺寸5倍以上,因此设定最大空间尺寸为3800mm的长方体模拟水下流体环境。图2为在初始外流场环境下的水下航行器三维网格模型,图3为局部网格细分后的三维模型。

图2 外流场下航行器网格模型

图3 尾部网格细分后的三维模型
采用CFX算法对仿生航行器壳体水下受压情况进行了仿真计算分析,图4是仿真分析结果。由图4可见,在航行器首部、尾鳍与器身根部出现第三等级压强区,压强上限为1.65×103Pa,下限为1.05×103Pa。器身最大截面处边界有较大面积的负压区,负压区压强值从-1.961×103Pa到-1.358×103Pa。从首部到尾鳍根部,器身压强从第三等压强区到负压区连续变化。
图5为局部放大的极限高压区域,尾鳍与迎面流质接触处,出现极限高压区,压强达2.861×103Pa;另外,由于尾鳍和器身相接处为非连续曲面过渡,故出现了高压区断层,压强值略减并向器身扩张。同时也发现,采用仿生学设计方法设计的流线型结构,有效改善了航行器流体动力学特性。
就同一水平面上绘制流线图,如图6所示,在正面矢量处速率急剧衰减,构成了一个流质低速区域,对比速率色谱可估算出速度衰减区,最高速度值为8.12×10-1m/s。控制面上连续速度变化使流质具有明显的湍流倾向。
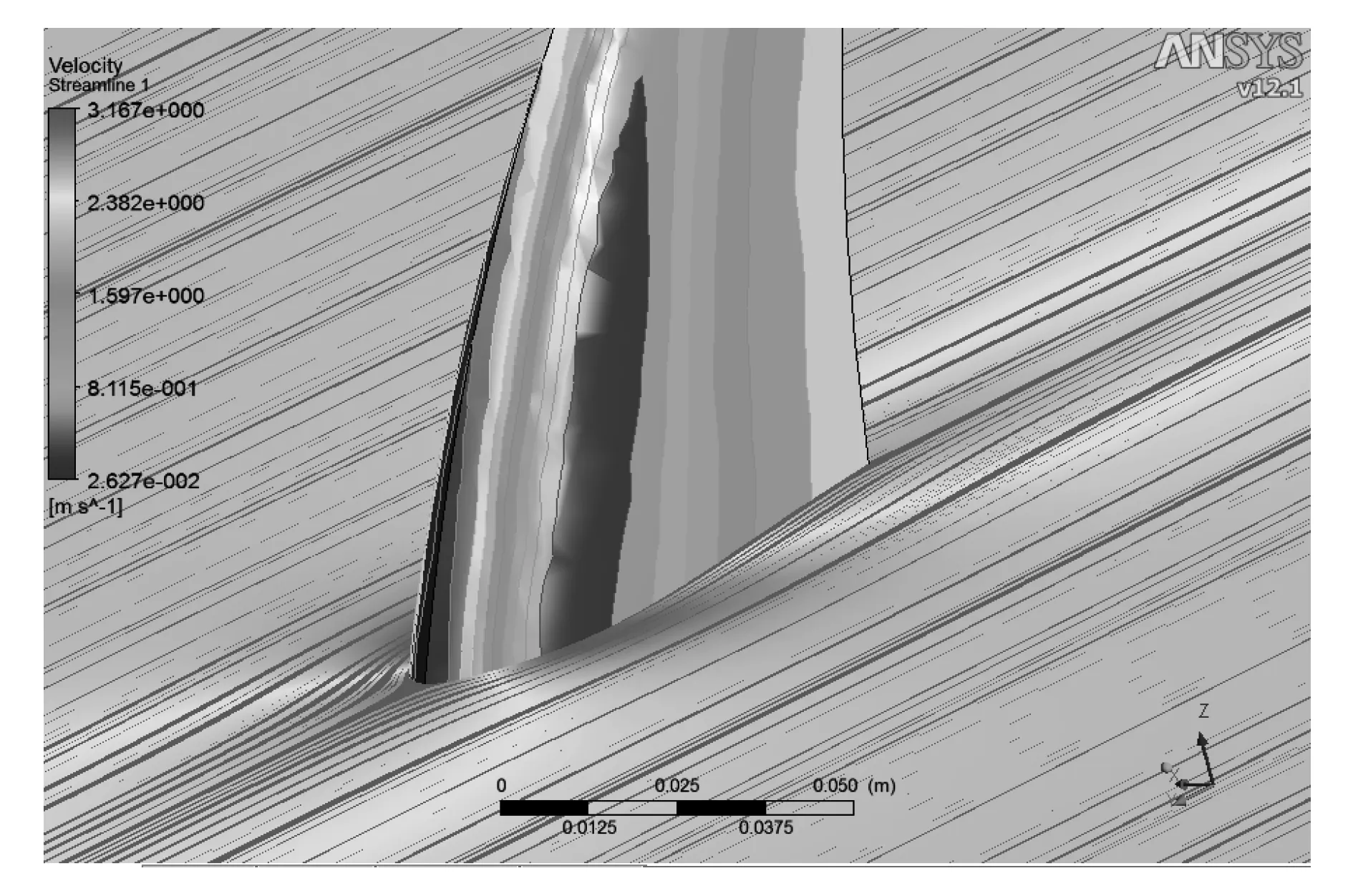
图6 尾鳍低压区流质水平面的流线分布
在上述工作的基础上, 为了进一步研究尾鳍结构尺寸对航行器流体动力学特性的影响, 开展了不同厚度尾鳍性能的分析研究,图7是4种不同厚度的改进尾鳍最大压强情况。可见,6mm厚度的尾鳍最大压强等级最低,随着尾鳍厚度的增加,最大压强数值呈现增大的趋势。
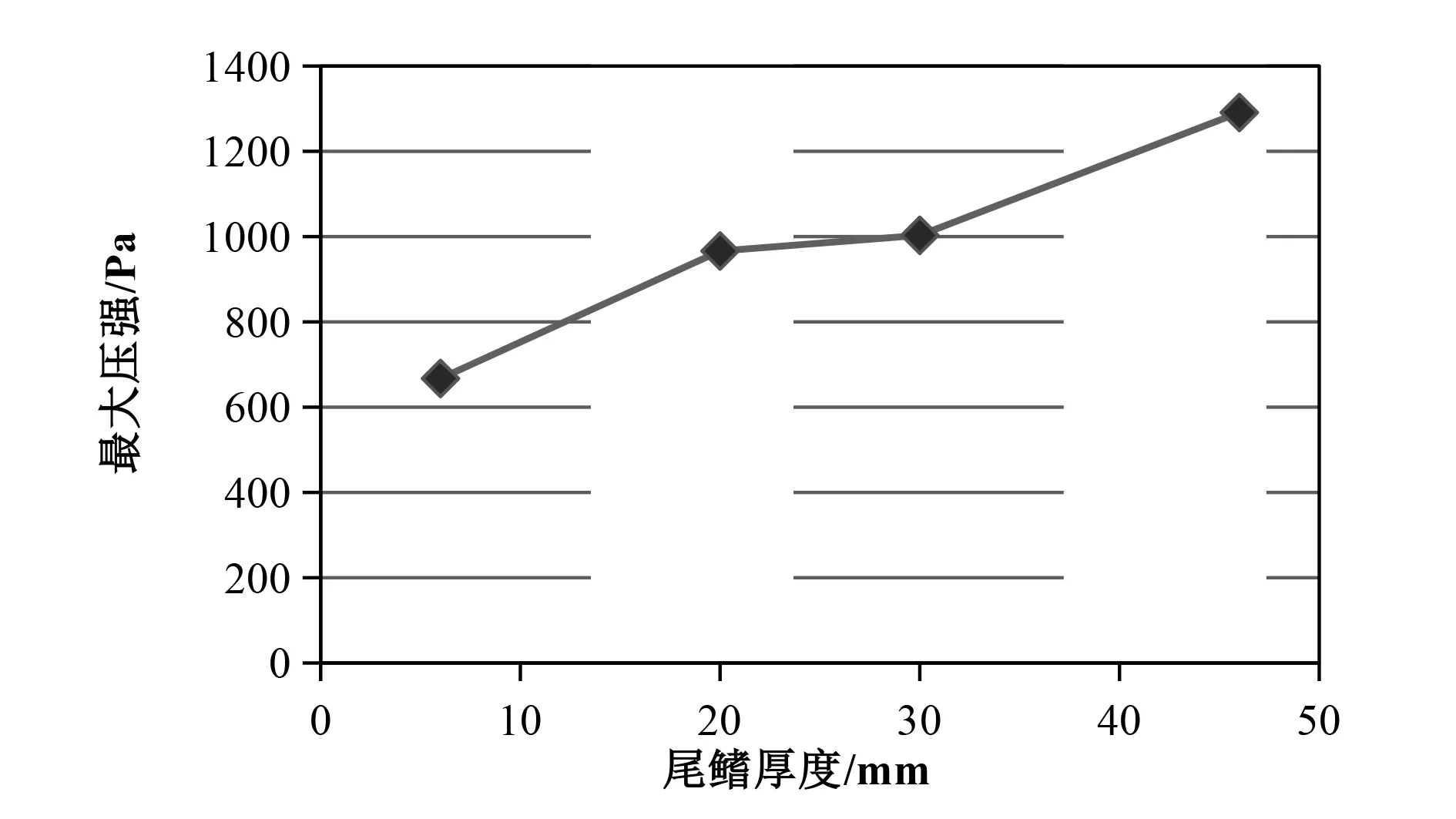
图7 不同厚度尾鳍5节流速下的最大压强情况
4结论
对水下航行器进行了仿生设计与分析,通过建立三维模型,基于流体动力学仿真软件对航行器水下压强分布进行了分析研究。分析结果表明,非连续过渡的器身结构处压强分布与流线分布出现急剧变化,但采用仿生学设计方法设计的流线型结构部位,则表现出良好的流体动力学特性。
参考文献
[1]梁建宏,王田苗,魏洪兴.水下仿生机器鱼的研究进展Ⅰ—鱼类推进机理[J].机器人,2002,24(2):107-111.
[2]M.J. Lighthill. Aquatic animal propulsion of high hydromechanical efficiency[J].Fluid Mech., 1970,44:265-301.
[3]D.S. Barrett, M. S. Triantafyllou, D. K. P. Yue, et al., Drag reduction in fish-like locomotion[J].Fluid Mech., 1999,73:183-212.
[4]M. Sfakiotakis, D. M. Lane, and J. B. C. Davies.Review of fish swimming modes for aquatic locomotion[J]. IEEE J. Oceanic Eng., 1999, 24:237-252.
[收稿日期]2016-06-13
[作者简介]曾思远(1995-),男,吉林大学机械学院工业工程系本科生,主要研究方向为机械结构优化设计与结构性能测试。
中图分类号:U674.941
文献标识码:B
doi:10.3969/j.issn.1674-3407.2016.02.018
Design and Analysis of Bionic Underwater Vehicle
Zeng Siyuan1, Wang Yutian2
(1.Department of Industrial Engineering, Jilin University, Changchun 130000, Jilin, China;2.College of Mechanical and Electric Engineering, Changchun University of Science and Technology,Changchun 130000, Jilin, China)
Abstract:Aiming at the urgent demand of underwater vehicle for marine exploration and other according fields, the status and classification of underwater vehicle are analyzed in the paper. Based on the analysis, combined with bionic method and taking the cetaceans as bionic template, the 3D model of bionic underwater vehicle is designed. Based on the fluid dynamics simulation software, the pressure and streamline distribution characteristics of the underwater vehicle are analyzed. The research has important significance for the design of underwater vehicle.
Keywords:marine exploration; underwater vehicle; bionic design; fluid analysis
猜你喜欢
科技创新导报(2017年13期)2017-07-13 15:11:21
中国科技纵横(2017年11期)2017-07-13 11:32:56
新教育时代·教师版(2017年16期)2017-06-14 15:26:33
中国科技博览(2017年10期)2017-05-25 04:10:47
艺术科技(2016年11期)2017-05-05 19:30:43
科技资讯(2016年19期)2016-11-15 10:26:04
戏剧之家(2016年13期)2016-07-07 12:23:40
企业导报(2016年11期)2016-06-16 15:13:11
中国科技博览(2016年1期)2016-04-25 12:28:04
科技视界(2015年27期)2015-10-08 14:52:10
