卫星导航信号跟踪环路的分析
2016-08-04 18:06刘智超
大科技 2016年20期
刘智超 崔 星
(陕西凌云科技有限责任公司 陕西西安 710119)
卫星导航信号跟踪环路的分析
刘智超 崔 星
(陕西凌云科技有限责任公司 陕西西安 710119)
本文介绍了载波跟踪环路和码跟踪环路的工作方式,通过对锁频环和锁相环相结合的载波跟踪方法的分析和设计,使环路在高动态的环境下能够稳定跟踪卫星信号。
卫星信号;载波跟踪;码跟踪;环路;锁频环;锁相环
1 引言
卫星信号经过了射频前端处理后,变成模拟的中频信号,模拟中频信号经A/D采样后变成数字中频信号送入基带信号处理模块中。基带信号处理模块完成信号的捕获、跟踪、位同步、帧同步功能,将解扩、解调、解码后的卫星电文送至后续的信息处理模块中,完成定位解算。为了保证接收机稳定的输出定位结果且保证定位的精度,除了要完成对信号的捕获,还需要高性能的跟踪环路来保证对信号稳定的跟踪。卫星信号捕获成功后,将获得信号的多普勒频率及码相位的粗略值,然后进入跟踪阶段。跟踪环路使本地所复制出的载波和码与卫星信号中载波和码相位保持精确同步,完成载波跟踪和码跟踪。由于卫星与载体的相对运动会产生多普勒频移。同时卫星时钟和接收机的晶振也会存在频漂,这就会导致接收卫星信号的载波频率和码相位是不断变化的,所以跟踪环路是以闭环的形式周期地、持续地运行。只有这样才能对卫星信号持续锁定,保证观测量和电文的输出。跟踪环路包括载波跟踪环和码跟踪环两部分,分别用来跟踪载波和伪码。
2 载波跟踪环路分析
载波跟踪环路是指连续地调整本地载波的频率和相位,使其与卫星信号上载波的频率和相位保持同步,然后通过混频的方式将载波从卫星信号中剥离出。只有彻底去掉载波频率,才能将信号真正地变频成基带信号。如果本地载波与接收信号的载波不一致,将会削弱码相关的幅值,导致电文不能被正确的解调。如图1所示,给出了载波跟踪环路的结构框图,数字中频信号经过下变频处理后变成I、Q两路基带信号,分别与本地码发生器生成的即时路码P进行积分累加,将累加的结果Ip、Qp分别送入鉴频器和鉴相器中,并计算出频率和相位的误差,将此误差经环路滤波器返回给本地载波NCO。通过调整本地的载波频率和载波相位,使其与接收到的卫星信号保持一致。其中,使频率保持一致的环路叫做锁频环,使相位保持一致的环路叫做锁相环。
锁相环是为了锁定接收卫星信号的上载波的相位,它也被称为一种接收机的技术,它可以在一个系统中调制出稳定的频率。锁相环通过不断调整本地载波的相位,使接收信号的载波与本地载波的相位始终保持一致。当接收信号与本地载波的相位趋于一致但未达到一致时,锁相环处于迁入状态,此时的锁相环表现为暂态特性;当接收信号与本地载波的相位达到一致时,锁相环此时处于锁定状态,此时的锁相环表现为稳态特性。如果暂态过程长时间不能稳定下来而未能进入锁定状态,锁相环将会失锁而导致丢失信号。

图1 载波跟踪环路框图
锁频环是为了锁定接收卫星信号的上载波的多普勒频率,它复制一个包含多普勒频率的本地载波,通过不断调整本地载波的频率,使接收信号的载波与本地载波的频率始终保持一致。卫星信号上的载波多普勒频率是不可预测的,锁频环需要鉴别出接收信号和本地载波的频率差异,然后调节本地载波NCO使两者的频率达到动态一致。锁频环和锁相环的结构基本相同,主要是鉴别器的算法不同。
基带信号处理中的锁频环和锁相环技术均可被采用且能够独立运行,但是选择哪一种环路以及环路中的积分时间、环路噪声带宽等参数的设置,还要根据具体的应用环境。噪声性能和动态性能是我们在设计跟踪环路时主要考虑的两个方面。
锁相环在有较窄的噪声带宽时,可以很好的跟踪信号,能够精确的测量载波相位,但是动态性能差,当载体高动态运动时会产生载波频率的变化,使环路带宽增大,导致锁相环不能锁定。锁频环在有较宽的噪声带宽时,动态性能好,但是环路噪声高,输出的载波测量值欠精确。
根据锁频环和锁相环的特点,可以将锁频环和锁相环组合在一起使用,既能够保证动态性能,又能保证跟踪精度。图2给出二阶锁频环辅助三阶锁相环的结构图,此环路可以稳定跟踪频率的加速度及加加速度变化。
锁频环跟踪载波频率,通过鉴频器获得载波频率误差,可以很快的将频差缩小,具有较好的动态性能,但跟踪精度却比锁相环低。锁相环跟踪载波相位,通过鉴相器获得载波相位误差,当环路闭合稳定时有较高的跟踪精度。因此,锁频环辅助锁相环混合跟踪可以在提高动态跟踪能力的同时,保证跟踪的精度。载波跟踪的工作模式是先启动锁频环,当频差减小到锁相环的调整范围时,转入锁相环跟踪。根据动态的变化情况,环路自动实现锁相环和锁频环跟踪方式的切换。
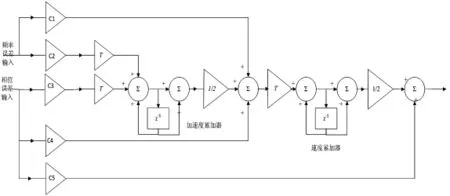
图2 锁频环辅助锁相环结构图
3 码跟踪环路分析
捕获成功后,本地码与接收信号的伪码完成粗对齐,误差在1/2码片之内,随后转入码跟踪过程,进而达到码相位精确对齐的目的。选用了非相干延迟锁定环(DLL)完成对码的跟踪,环路结构如图3所示,DLL环路由积分清除器、码鉴相器、环路滤波器组成。
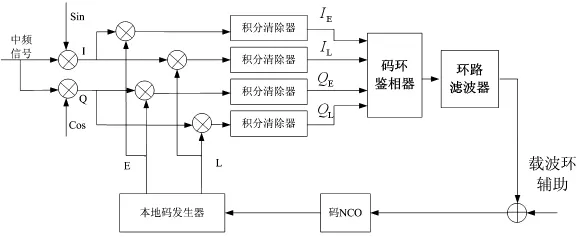
图3 码跟踪环路结构图
码鉴相器提取本地码与接收信号码的相位误差,经过环路滤波,与载波多普勒辅助信息和码NCO控制字一起传入码NCO。在码NCO的时钟驱动下,码生成器就可以产生与卫星信号精确同步的本地码。
载体的高动态运动产生载波多普勒频移,同时也会对码产生影响,产生码多普勒,采用载波环辅助的方法能够较小多普勒的影响。设载波多普勒频率为f0,码多普勒频率为fcd,载波频率为fL,码速率为Rc,得到:
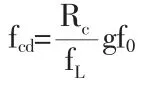
在捕获成功后,获得载波多普勒频率f0,此时残留的载波多普勒已经在±625Hz以内。按照上式进行载波辅助,以BDS B3频点的C/A码为例:

4 载波跟踪环路仿真
对所设计的环路进行仿真,来验证此环路的性能,将二阶锁频环的环路带宽Bn设为20Hz,三阶锁相环的环路带宽Bn设为15Hz,只考虑热噪声误差。
4.1 定频跟踪
设定输入信号的载噪比为41dB,载波多普勒频率为1kHz,且不随时间变化,预积分时间Tcoh为0.5ms,初始频差1kHz,不考虑数据位对环路的影响,由图4可知,该环路可对定频频率稳定跟踪。
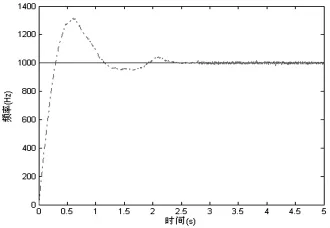
图4 环路对定频跟踪结果图
4.2 频率斜升跟踪
设输入信号载噪比为41dB,多普勒频率随时间做斜升变化,fd=k·t,k表示频率斜升的斜率,预积分时间Tcoh为0.5ms,初始频差为1kHz,由图5可知,该环路可对频率斜升稳定跟踪。
4.3 加加速度的应力
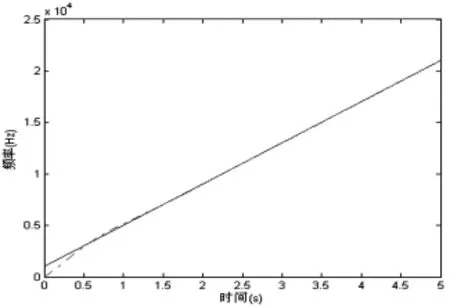
图5 环路对频率斜升跟踪结果图
设输入信号载噪比为41dB,多普勒频率随时间加加速度变化,fd=aa· 0.5t2,aa表示多普勒频率加加速度(aa=10g),预积分时间Tcoh为0.5ms,初始频差为1kHz,由图6可知,该环路可对频率加加速度进行稳定跟踪。
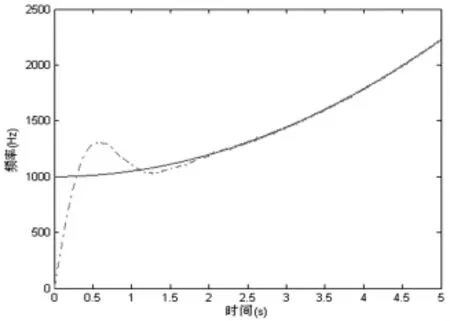
图6 环路对频率加加速度跟踪结果图
5 结束语
通过对锁频环和锁相环相结合的载波跟踪环路分析与仿真可知,锁频环能够迅速锁定频率并转换到锁相环上,可以分别在定频、频率斜升和频率加加速度变化的情况下稳定跟踪。
[1]刘基余.GPS卫星导航定位原理与方法[M].北京:科学出版社,2003.
[2]谢钢.GPS原理与接收机设计[M].电子工业出版社,2009:78~89.
[3]袁建平,罗建军,等.卫星导航原理与应用[M].中国宇航出版社,2003.
[4]杨小牛,楼才义,徐建良.软件无线电原理与应用[M].电子工业出版社,2001.
[5]黄少杰,沙跃家.GPS高动态接收机的研究和硬件实现[D].北京邮电大学硕士论文,2009:50~60.
[6]孙峰.高动态多星座接收机捕获和跟踪技术的研究与实现[D].西南交通大学研究生学位论文,2009,1.
TN96.1
A
1004-7344(2016)20-0257-02
2016-7-4
刘智超(1983-),男,设计师,主要从事无线电导航、卫星导航与通信等开发工作。
崔星(1986-),男,设计师,主要从事无线电导航、卫星导航与微波等开发工作。
猜你喜欢
上海公路(2018年4期)2018-03-21
电测与仪表(2017年24期)2017-12-19
西部广播电视(2015年10期)2016-01-18
电测与仪表(2015年9期)2015-04-09
电测与仪表(2014年15期)2014-04-04
电测与仪表(2014年8期)2014-04-04
电测与仪表(2014年8期)2014-04-04
现代防御技术(2014年6期)2014-02-28
铁路通信信号工程技术(2014年6期)2014-02-28
华东理工大学学报(自然科学版)(2014年2期)2014-02-27