一种基于像素差值特征的车辆检测方法
2016-08-04 02:07:36连捷
网络安全与数据管理 2016年13期
连 捷
(中国电子科技集团公司第三十八研究所,安徽 合肥 230088)
一种基于像素差值特征的车辆检测方法
连捷
(中国电子科技集团公司第三十八研究所,安徽 合肥 230088)
摘要:为了快速定位监控场景中的车辆位置,提出了一种基于像素差值特征的车辆检测方法。首先提取图像的归一化像素差值特征(NPD),之后使用深度二次树(DQT)学习最优的特征子集,最后使用AdaBoost算法筛选最具区分力的特征构建强分类器。以含有正面、侧面及背面三个角度超过3 500个样本为测试集进行了快速车辆检测测试,并与梯度方向直方图(HOG)和Haar的组合特征进行了对比。对比实验表明,基于NPD的车辆检测方法最优,其检测率和检测时间分别为85.47%和200 ms。
关键词:车辆检测;NPD特征;深度二次树;级联分类器
引用格式:连捷. 一种基于像素差值特征的车辆检测方法[J].微型机与应用,2016,35(13):43-44,50.
0引言
公共安全中的汽车是一个关键性元素,如何快速检测出车辆,并进行后续分析具有实际意义。基于视频分析的车辆检测算法主要包括:帧间差分法、光流法、背景差分[1-3]等。这些算法要么过于简单,检测效果不好,要么过于复杂,计算量太大,对于海量视频分析不太现实。基于AdaBoost 算法[4]虽然速度快,但是虚警率较高,检测效果一般。NEGRI P等人[5]综合了HOG特征和Haar特征,将两种特征的融合特征作为AdaBoost训练的输入,该方法对单一角度的车辆检测结果较好,但对多角度的车辆检测扩展性能不好。本文对传统AdaBoost 算法进行改进,结合归一化像素差值特征(NPD)和深度二次方树(DQT)[6],使用多角度车辆样本来训练AdaBoost,实验结果表明本文方法与参考文献[5]中的检测算法相比较,检测速度更快,检测率更高。
1基于NPD及DQT的车辆检测方法
1.1归一化像素差值特征空间
一幅图像中的两个像素的归一化像素差值(NPD)特征可以定义如下:
(1)
其中,x≥0,y≥0是两个像素的灰度值,当x=y=0 时,定义f(0,0)为0。
NPD特征度量两个像素值的相对差异性。f(x,y)的符号表示像素x和y的序数关系,幅值表示两个像素的相对差值。NPD对于灰度值的线性变化具有不变性。
1.2深度二次树
传统的基于AdaBoost 分类器的车辆检测算法是将若干弱分类器通过训练组合成一个强分类器。这种弱分类器的缺点是解析不同特征空间维数的相关性的能力较弱,另外它也忽略了特征中的高阶信息。本文提出了一个更好的弱分类器,使用二次元分割策略和一个更深的树形结构。对于一个特征x,本文使用如下函数划分一个树的节点:
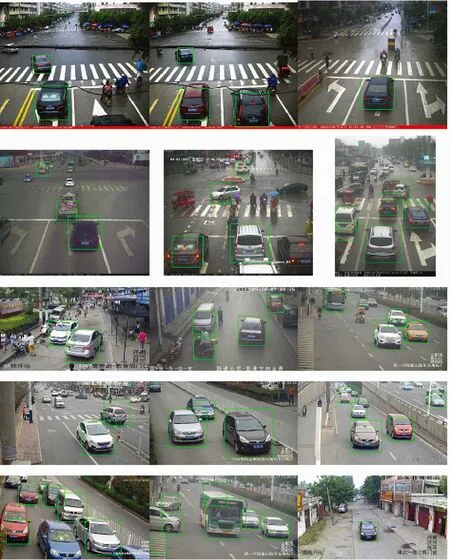
ax2+bx+c (2) 其中,a、b、c是常值,t是划分阈值,验证其是否位于两个学习到的阈值之间。式(2)同时考虑特征x的一阶和二阶信息,使其可以更好地解析划分策略。 1.3车辆检测器 由于 NPD特征含有很多冗余信息,本文使用AdaBoost 算法学习最有区分力的特征,构建强分类器[8],并采用Gentle AdaBoost算法[9]来学习基于NPD特征的深度二次元树。 参考文献像[7]一样,一个级联分类器被进一步学习用于快速车辆检测。这里只学习一个级联分类器来进行车辆检测。此外还采用了软级联结构[10]来快速学习和排除负样本。软级联看作一个AdaBoost分类器,每个弱分类器有一个终点。每个迭代过程中,一个深度二次元树作为弱分类器被学习,当前AdaBoost分类器的阈值也被学习。多个深度二次元树被组合成一个强分类器。 2实验结果 为对本文提出的算法进行测试,采用了合肥交通局提供的交通监控图像。实验图像由10个相机在合肥不同的路口进行采集,原始图像大小覆盖范围为1 920×1 080~2 448×2 048。图1显示了部分车辆图像。 图1 实验图像 用于训练的样本是1 499张图像中的4 957个车辆,大小归一化为24×24,负样本由不包含车辆图像的24 840个样本组成。最终的检测器包含1 226个深度二次元树,46 401个NPD特征。NPD特征的计算可以通过查表法来加速计算。 使用3 568个车辆图像对算法进行测试,正确检测的评价标准是检测出的目标框与标记的框交并比大于某一阈值,本文将阈值取为0.5。将车辆图像分为较难、中等和较易3个数据集,对应每个数据集的车辆数目分别为1 073、960和1 535,每种车辆数据集对应的检测结果如表1所示。由图2的检测结果可以看出,本文提出的方法对不同尺度、不同角度的车辆鲁棒性较好。 表1 检测结果比较 图2 车辆检测结果 另外,为了与之前的方法进行对比,使用NEGRI P[7]提出的HOG和Haar组合特征在相同的训练集上训练AdaBoost分类器,负样本从362张不含车辆的图片随机裁切,使用训练好的分类器对3个难度不同的测试集进行测试,结果如表1所示。实验结果表明本文所使用的NPD特征在检测性能上超越了HOG和Haar特征,对于降采样后平均尺寸为640×480的图像,检测一张图像NPD约需200 ms,而HOG-Haar组合特征约需1 s。 3结论 针对海量视频中的快速有效车辆检测问题,本文提出了一种改进的AdaBoost算法,结合归一化像素差值特征(NPD)和深度二次方树(DQT)来提高模型的表示能力,通过各种角度的车辆样本训练得到改进的AdaBoost车辆检测器。实验结果表明,与传统AdaBoost算法相比较,本文算法能够快速有效地检测前后面、侧面的车辆,具有一定实用性。 [1] SEKI M, FUJIWARA H, SUMI K. A robust background subtraction method for changing background[C].Applications of Computer Vision, 2000, Fifth IEEE Workshop on. IEEE, 2000: 207-213. [2] 李喜来, 李艾华, 白向峰. 智能交通系统运动车辆的光流法检测[J]. 光电技术应用, 2010, 25(2):75-78. [3] STAUFFER C, GRIMSON W E L. Adaptive background mixture models for real-time tracking[C].Computer Vision and Pattern Recognition, 1999. IEEE Computer Society Conference on. IEEE, 1999, 2:252. [4] 金立生, 王岩, 刘景华, 等. 基于 Adaboost 算法的日间前方车辆检测[J]. 吉林大学学报: 工学版, 2014, 3(6): 1604-1608. [5] NEGRI P, CLADY X, HANIF S, et al. A cascade of boosted generative and discriminative classifiers for vehicle detecti-on [J]. EURASIP Journal on Advances in Signal Processing, 2008(1):1-12. [6] LIAO S, JAIN A, LI S. A fast and accurate unconstrained face detector [J]. IEEE Transactions on Pattern Analysis & Machine Intelligence, 2014, 38(2):211-223. [7] SINHA P. Qualitative representations for recognition[C]. Biologically motivated computer vision. Springer Berlin Heidelberg, 2002: 249-262. [8] VIOLA P, JONES M. Rapid object detection using a boosted cascade of simple features [C].Computer Vision and Pattern Recognition, 2001. CVPR 2001. Proceedings of the 2001 IEEE Computer Society Conference on. IEEE, 2001. [9] FREDMAN J, HASTIE T, TIBSHIRANI R. Additive logistic regression: a statistical view of boosting (with discussion and a rejoinder by the authors)[J]. The annals of statistics, 2000, 28(2): 337-407. [10] BOURDEV L, BRANDT J. Robust object detection via soft cascade[C].Computer Vision and Pattern Recognition, 2005. CVPR 2005. IEEE Computer Society Conference on. IEEE, 2005: 236-243. 中图分类号:TP391.4 文献标识码:A DOI:10.19358/j.issn.1674- 7720.2016.13.014 (收稿日期:2016-04-05) 作者简介: 连捷(1988-),男,硕士,助理工程师,主要研究方向:智能交通图像处理和模式识别。 An efficient vehicle detection method based on pixel difference features Lian Jie (China Electronics Technology Group Corporation No.38 Research Institute, Hefei 230088, China) Abstract:An efficient vehicle detection algorithm is proposed for traffic surveillance images, which is based on a new image feature called Normalized Pixel Difference (NPD).A deep quadratic tree is constructed to learn the optimal subset of NPD features and their combinations. And AdaBoost algorithm is used to select discriminative features and form a strong classifier. A dataset with three viewpoints, which consists of more than 3 500 images is used to test the proposed method. The experimental results indicate that compared with the HOG and Haar combination feature, the proposed NPD based method is the best with a detection accuracy of 85.47% and an elapsed time of 200 ms. Key words:vehicle detection; NPD feature; deep quadratic tree; cascade classifier