基于纹理识别的粘连车辆检测*
2016-08-04 02:07:34朱金荣张广杰夏长权
网络安全与数据管理 2016年13期
朱金荣,张广杰,夏长权
(扬州大学 物理科学与技术学院,江苏 扬州 225002)
基于纹理识别的粘连车辆检测*
朱金荣,张广杰,夏长权
(扬州大学 物理科学与技术学院,江苏 扬州 225002)
摘要:针对视频车流量检测系统无法识别粘连车辆的局限性,提出了基于纹理识别与滤波扫描相结合的算法,并采用聚类分析法检测判断粘连车辆。文章对车道的各区域采用基于纹理识别的方法计算出纹理描述子,获得车辆顶部初步坐标;利用滤波器扫描得到车顶部位的精确坐标,并采用聚类分析法判断粘连车辆,从而提高车流量检测的精度。
关键词:智能交通;车辆轮廓提取;纹理特征参数;滤波器扫描;聚类分析
引用格式:朱金荣,张广杰,夏长权. 基于纹理识别的粘连车辆检测[J].微型机与应用,2016,35(13):40-42.
0引言
随着汽车数量的增加,道路交通流量也日益上升,交叉路口的压力越来越大。然而绝大部分的交通信号灯为定时控制,该方法不能有效地发挥交叉路口的通行能力,因此需要建立合理的交通信号灯智能控制系统。
在以往的车辆检测与统计中,最常见的是采用感应线圈检测器,在车流量较少的路段对车辆进行检测与计数,这种方法的主要缺点是影响交通、软化路面、线圈受环境影响大、车辆粘连误判[1-2]。
随着信息科学的飞速发展,利用视频处理技术来进行车量的检测与车流量统计逐渐取代以往的检测方法。目前的视频检测有很大的局限性,当车身粘连不严重时,可以实现计数操作[3],但在交通拥挤的路况下,车辆粘连相当严重,二值化后的两辆车还是一个整体,不能用传统的开闭操作区分粘连车辆。为了克服以上问题,本文在完成图像预处理后进行了车辆轮廓的提取,再采用纹理检测与空间滤波器扫描的方法对粘连车辆进行甄别区分,以实现更精确的计数。
1轮廓提取与检测框设置
摄像头采集的视频帧中的车辆图像是PAL制式[3-4]的真彩图,数据量很大,因此在保留车辆特征的前提下,需对图像进行转换。首先对图像中的车辆进行轮廓提取,然后采用基于局部区域检测车辆的方法,根据车道设置检测框,在框内完成图像处理操作。
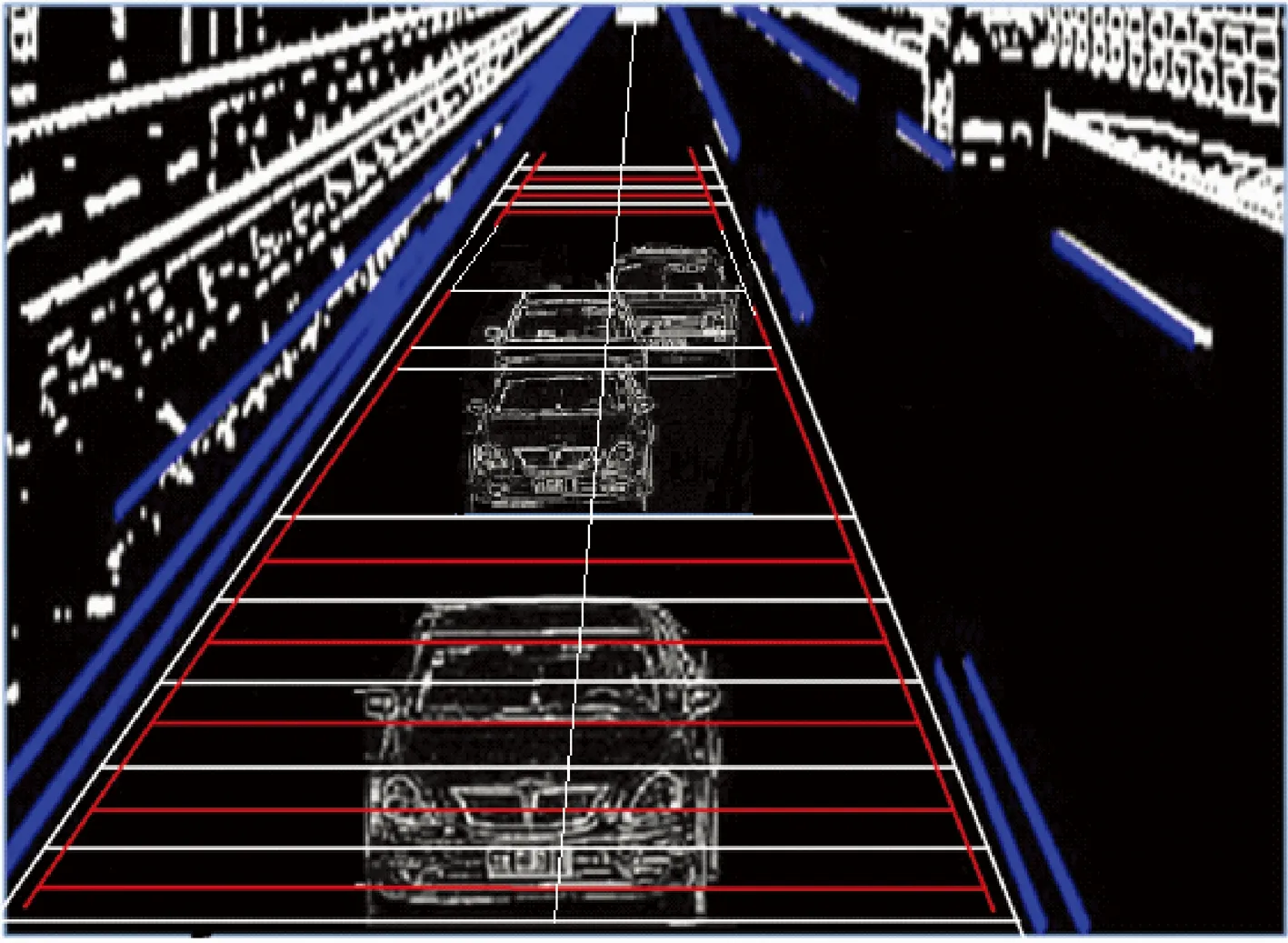
图1 车辆检测预处理
如图1,本文采用边缘检测的方法得到车辆线状的轮廓图,由于视场的欧几里得距离,图像中车辆目标的大小会随着距离而发生变化,因此车辆检测不能基于全局使用同一个算法。在做具体的图像检测算法之前,首先要在车道线内将道路划分成局部区域[3,5],因此算法中对二维的图像要设置检测框,将框内的图片数据赋值到检测算法的变量中,各检测框设置相应的阈值。
2轮廓线的纹理检测
上一节对车辆进行了轮廓提取,将图像根据车道线分为各个区域,本节对每个区域的车辆轮廓线进行特征提取。对图像区域进行特征提取的一种重要方法就是量化区域的纹理内容[6],车辆的轮廓图是灰度图,不是二值图像,保留了纹理信息,因此可以用于车辆特征的提取。纹理分析方法基于灰度直方图的统计特性,以灰度值统计矩为度量基础。
令Z表示灰度的随机变量,则zi的值为0~255,p(zi)表示zi灰度的出现概率,通过计算得到6种纹理的描述子:
(3)平滑度R=1-1/(1+σ2),表示灰度的相对平滑度度量;

采用上述方法对近景区域内车辆轮廓进行纹理描述子的计算,远景车辆图片粘连太严重,已经失去了轮廓信息,因此不统计。图2中的9张图片归纳了车辆的各部位。图2中①②③样本是车顶部位的轮廓图,④是前窗玻璃遮光板部位,⑤中包含了车辆后视镜,⑥是车辆的散热器格栅和前大灯部位,⑦是车牌位置,⑧⑨是两辆车粘连的位置。
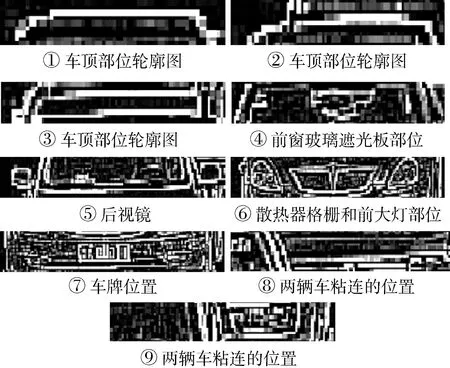
图2 车辆各部位检测样本
经过纹理检测,计算出所有纹理描述子,得到图2各个样本的局部纹理参数。数据表明,图2中车辆的各个部位的均值、标准差、平滑度和熵值的大小都没有明显规律,但车顶轮廓线的三阶矩和一致性对于纹理变化的响应很强。在监控摄像头下,车顶部位一般不会被遮挡,车顶部位又具有很强的纹理响应,因此三阶矩和一致性的纹理描述子可以作为车辆的判定依据。
3车辆数统计
检测区域在经过第2节中的车顶轮廓线检测后,需要寻找线端点。根据车辆线状轮廓图的特点发现,图像中车的两侧的像素点亮度值很高。因此,为了计算出端点,本文提出了滤波器平移扫描的方法[7],以横线端点靠内侧一点为原点进行平移扫描,可以得到所需参数。本文设计的滤波器是基于车辆先验条件的滤波器,车辆的左侧面和右侧面需要镜像对称的两个滤波器,函数表达式分别为:
(1)
(2)
滤波器的权值分布呈现为平行四边形, H1、H2滤波器分别向左、右方向扫描,计算出图像中每个位置的H1、H2的值就是滤波器平移扫描的结果,得到滤波值曲线并根据峰值确定端点位置。图3中3个检测模型为典型的粘连情况,阿拉伯数字代表了检测到的车顶轮廓线。图(a)中两辆车紧挨着,其中一侧几乎平行,(b)中表现为距离稍远的遮挡;(c)中距离稍远,且被挡车的车身前方露出很大一部分。扫描得到的端点坐标用于聚类分析,从而统计车辆数。
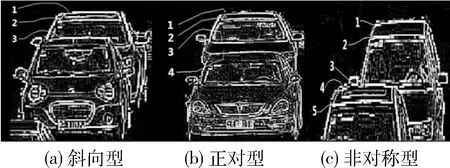
图3 车辆检测模型
聚类分析又称群分析,它是研究样本分类问题的一种统计分析方法,常用的聚类方法有类平均法、可变类平均法、最短距离法、重心法等。考虑到端点坐标的空间分布特性和需要提取的有效信息,本文选择最短距离法。以所有车顶轮廓线的左端点坐标作为分析样本,坐标数据放入数组A中,将A分为两类数组Ai和Aj,用dij表示样本Xi与Xj之间的距离,Dij表示类Ai与Aj之间的距离,则两类最近样本之间的距离为:
(3)
对图3中线端点的聚类分析步骤如下:
(1)定义样本之间的距离,计算样本的两两距离,得到距离矩阵D(0),开始时每个样本自成一类,这时的Dij=dij。
(2)找出距离最小元素,设为Dpq,将Ap和Aq合并成一个新类,记为Ar,即Ar={Ap,Aq}。
(3)计算新类Ar与其他类Ak的距离:
(4)
(4)重复步骤(2)和(3),直到所有元素并成一类为止。如果某一步距离最小的元素不止一个,则同时合并对应这些最小元素的类。
(5)得到的最后两个类的距离Dth用于阈值分析,分离粘连车辆。
计算得到左端点聚类结果(Ai,Aj,a),右端点聚类结果(Bu,Bv,b)。Ai,Aj和Bu,Bv是聚类运算的最后两个类,a、b是最终聚为一类的簇值,下标值的对应与否和簇值差值都是车顶轮廓对称性的体现,是车辆分离的判断依据。下标值不对等时,判断为两个车辆;当下标值对等(i=u,j=v),要对簇值进行比较,簇值的差值比例 |a-b|/max(a,b)小于阈值Th时判断为一辆车,否则为两辆车。经过测试,Th值设为0.3较好。
对图3(a)、(b)、(c)车顶轮廓线端点坐标进行聚类分析,得到(a)的聚类结果为(A4,A3,30)、(B4,B3,60),数组下标对等,差值比例0.5>0.3,判断为两辆车;(b)的聚类结果为(A5,A6,35)、(B4,B2,5),数组A、B下标不对等,为两辆车;(c)的聚类结果为(A6,A5,153)、(B6,B4,117), A5和B4下标不等,判断为两辆车。
4结论
本检测方案进一步优化了车辆视频检测的算法:将车辆图像转换成轮廓图,提取出车辆的边缘特征以减少运算量;使用基于纹理描述子的方法,搜索到车辆图像中的车顶位置;然后依据轮廓图中车侧面的像素点亮度高的特点,采用基于先验条件滤波器扫描的方法,寻找到车顶的两侧位置,得到相应坐标参数;最后通过系统聚类法对坐标参数进行聚类分析,判断出粘连车辆。该方法精度准确,处理时车辆图像有效信息损失量小,能够针对交通拥堵的路况,对粘连车辆实现区分、检测与计数,提高车流量计数精确度。下一步工作是优化算法,提高算法的运行速度。
参考文献
[1] 夏发钦.利用地感应线圈检测机动车辆的原理与实现[D]:武汉:武汉科技大学,2011.
[2] 苑宇坤. 智慧交通关键技术及应用综述[J].电子技术应用,2015,41(8):9-12.
[3] 刘腾飞.针对车体遮挡的车流量统计算法[J].武汉:武汉理工大学,2012.
[4] 刘涛.智能车路径识别与控制性能提高方法研究及实现[J].电子技术应用,2016,42(1):54-57.
[5] JEONG P, NEDEVSCH I S. Efficient and robust classification method using combined feature vector for lane detection[J]. IEEE Transactions on Circuits and Systems for Video Technology,2005,15(4):528-537.
[6] GONZALEZ R C.数字图像处理的MATLAB实现[M].阮秋琦,译.北京:清华大学出版社,2013.
[7] 蔡梅艳.基于TMS320C642DSP的目标图像识别研究[D].南京:南京航空航天大学,2007.
*基金项目:国家自然科学基金(11304271)
中图分类号:U121
文献标识码:A
DOI:10.19358/j.issn.1674- 7720.2016.13.013
(收稿日期:2016-02-17)
作者简介:
朱金荣(1968-),男,硕士,副教授,硕士生导师,主要研究方向:光电技术、自动控制。
张广杰(1990-),男,硕士研究生,主要研究方向:图像处理,交通工程。
夏长权(1979-),男,博士,硕士生导师,主要研究方向:交通工程,自动控制。
Detection of severely-shaded vehicles based on textural recognition
Zhu Jinrong, Zhang Guangjie, Xia Changquan
(College of Physical Science and Technology, Yangzhou University,Yangzhou 225002,China)
Abstract:Aiming at the limitation of recognition for overlapped vehicles in the traffic video detection system, the algorithm based on texture recognition and filter scanning was proposed, and hierarchical clustering was used for judging. In this article, using the method of texture recognition to figure out the texture descriptors of each traffic lane region , so the coordinates of car roof was worked out. And next ,using filter scanning to gain the accurate coordinates of car roof , using cluster analysis to distinguish the overlapped vehicles, thereby the accuracy of vehicle flow detection was improved.
Key words:intelligent traffic; vehicle contour extracting; feature parameters of texture; filter scanning; cluster analysis
猜你喜欢
科技创新与应用(2016年34期)2016-12-23 15:54:44
电子技术与软件工程(2016年20期)2016-12-21 09:28:29
电子技术与软件工程(2016年19期)2016-12-19 18:42:01
电子技术与软件工程(2016年19期)2016-12-19 17:08:08
商情(2016年39期)2016-11-21 08:45:54
新媒体研究(2016年19期)2016-11-18 19:48:34
大经贸(2016年9期)2016-11-16 16:16:46
数字技术与应用(2016年9期)2016-11-09 23:02:51
中国市场(2016年33期)2016-10-18 12:16:58
科学与财富(2016年28期)2016-10-14 04:43:28