
自制“力学实验多功能演示仪”
2016-08-01 06:08:49卢辉林
物理之友 2016年6期
王 旭 卢辉林
(江苏省海安高级中学,江苏 南通 226600)
自制“力学实验多功能演示仪”
王旭卢辉林
(江苏省海安高级中学,江苏南通226600)
摘要:在力的合成与分解的教学中,存在传统实验器材精度差、实验效果不明显的现象.本文从实验器材上进行了改进,通过自制“力学实验多功能演示仪”,配合Dislab力传感器等器材,取得了较好的实验效果.
关键词:力学实验;演示仪;Dislab
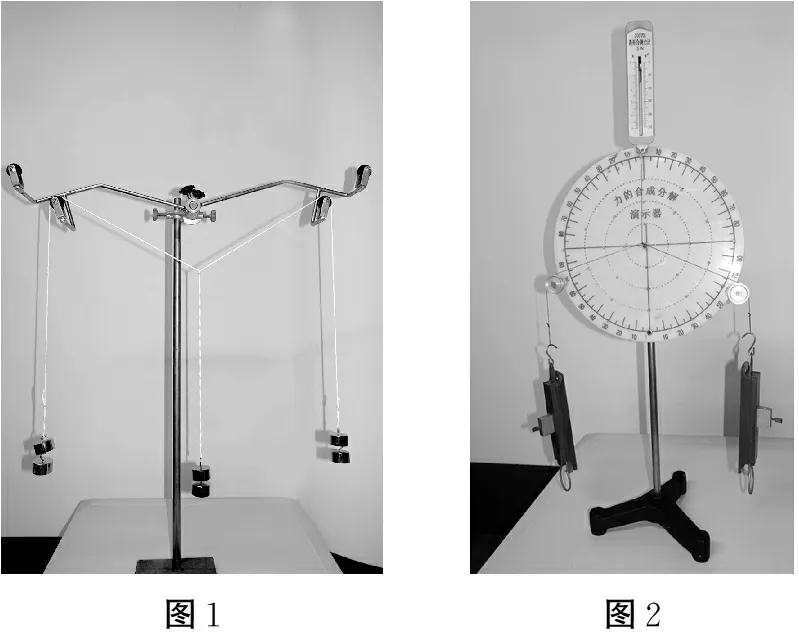
传统的力的合成与分解仪(如图1、图2)在做演示实验时存在诸多问题,例如:用图1的器材来演示力的合成实验时由于结点不固定,细线的角度较难测读.再有所挂钩码个数只能是整数个,学生总会有“说不清、道不明”的疑惑.而图2的器材中,下面的两个弹簧秤所测拉力由于受到弹簧秤自重的影响,读数误差较大.另外利用此装置演示力的动态变化时,读数时很难观察到所有弹簧秤示数完整的变化情况.针对这些问题,笔者经过改进,自制了一个“多功能力学演示仪”,现叙述如下.
1“多功能演示仪”实物图及结构
图3为笔者自制的“力学实验多功能演示仪”,主要由3部分组成:(1) 自制不锈钢支架和调平螺栓;(2) 刻度均匀的圆盘;(3) 两个旋转臂(均带圆柱和固定栓).

图3
2“多功能演示仪”的辅助器材及实验演示说明
辅助实验器材:计算机一台,Dislab实验系统一套,钩码一盒(每个50g),细线若干,直尺一把,量角器一个.用“多功能演示仪”配合以上的实验器材,可以进行以下演示实验.
2.1探究力的“平行四边形定则”
该实验具体操作步骤如下:
(1) 利用六角螺丝栓将演示仪调平,在演示仪的两个旋转臂上分别固定一个力传感器.
(2) 将Dislab数据采集器与计算机相连,在计算机上安装Dislab实验软件,打开“通用软件”,首先进行调零.
(3) 用三根不可伸长的细线打结,注意将细线的结点对准演示仪的圆心,两根细线钩住力传感器,另一根将钩码悬于竖直平面.
(4) 记下钩码的重力大小及两个力传感器的示数,从圆盘上读出两细线与竖直方向的夹角,即记录两个拉力的方向.
(5) 利用直尺和量角器在黑板上用力的图示法,分别作出两个拉力及合力(钩码重力的平衡力).再以两个拉力为邻边作平行四边形,验证合力与平行四边形的对角线是否重合.
(6) 调整两个力传感器的角度,重复以上步骤,获取多组数据,进行验证.
2.2演示力的动态变化
以一道习题为例,用该演示仪来演示力的动态变化.
例:如图4所示,用两根绳子OA和OB系住一重物,绳OA固定于A点,手拉绳OB,使OB由水平位置逐渐转到OB′方向,保持小球位置不变,在这个过程中,两根绳受到的拉力变化情况是FOA___________,FOB___________.

这道题对于初学者来说具有较大的难度,即便是老师利用比较直观的“动态平行四边形”(如图5)进行了详细讲解后,有些学生还是将信将疑.传统的实验仪器误差大、不直观,利用改进后的“多功能演示仪”和Dislab实验系统可以完成动态的演示,并可将FOA、FOB的数据直接采集.另外Dislab实验系统还可以将各个力的动态变化情况以图像的形式完整呈现出来,非常直观.
该演示实验具体操作步骤和结果如下:
(1) 将演示仪调节水平,在演示仪的两个旋转臂上分别固定一个力传感器并与计算机相连.
(2) 按图4所示调节旋转臂,左臂力传感器所拉细线对应绳OA,保持其固定.右臂力传感器所拉细线对应绳OB,且初始时调节细线至水平位置.将细线的结点调节到圆盘的圆心,向下方引出一根细线,并在竖直方向悬挂钩码(笔者做实验时挂了两个50g的钩码).
(3) 打开Dislab实验软件,点击“通用软件”,出现界面后,系统会自动弹出两个对话框,直接显示出拉力FOA、FOB的大小.
(4) 保持左边的旋臂不动,缓慢将右臂由B向B′转动,同时在纸上记录下计算机所显示的各组数据.表1中的数据即为笔者利用此装置采集的力的大小.
(5) 若要得到变化过程中力的图像,需将右臂恢复到初始位置,点击Dislab实验软件工具栏中的“组合图线”,添加x轴为时间,y轴分别为力F1(FOA)、F2(FOB),在对话框中的下拉菜单中选择两种不同的颜色作为力的标记.
(6) 将右臂由OB位置逐渐转至OB′位置,观察图像可以发现:FOA由大渐渐变小,FOB先变小后变大(如图6).

表1

图6
3几点注意事项及说明
(1) 利用该装置完成以上两个实验时发现,实验效果直接受到支架是否调节水平的影响.
(2) 实验时要确保各个力在竖直平面内,且细线的结点应与圆盘圆心重合.
(3) 利用Dislab实验软件采集数据时,要先调零再采集数据.
(4) 该装置成本低廉,安全耐用,配合力传感器等器材可以完成多个力学实验,实验精度高、演示效果好.
