基于新型植树挖坑机机架的动静态分析及试验验证
2016-07-30 07:48:12娄玉印
农产品加工 2016年12期
刘 涛,娄玉印,黄 伟
(1.信阳农林学院食品学院,河南信阳 464000;2.广西科技大学鹿山学院,广西柳州 545000;3.广西大学机械工程学院,广西南宁 530004)
基于新型植树挖坑机机架的动静态分析及试验验证
刘涛1,*娄玉印2,黄伟3
(1.信阳农林学院食品学院,河南信阳464000;2.广西科技大学鹿山学院,广西柳州545000;3.广西大学机械工程学院,广西南宁530004)
针对传统挖坑机的缺点,研发了一种挖坑效率高、成本低,且能够满足不同土壤条件、地形、坑深和坑径要求的新型植树挖坑机。通过有限元分析和试验验证,结果表明,新型植树挖坑机能够满足工作要求并且挖坑机机架能够满足动静态要求。
新型植树挖坑机;有限元;APDL
基于保护环境的原则,植树造林已成为广大民众的公共意识。目前,国内外挖坑机的工作原理为挂靠式拖拉机提供动力,通过三点式提升机构带动螺旋式刀盘旋转完成挖坑作业。其优点是整机结构简单、制作方便,缺点为螺旋式刀盘产生不断变化的侧压力,导致拖拉机的摇晃和振动,进而使螺旋式刀盘工作阻力增大、稳定性差,使用范围也受到很大限制。
针对传统挖坑机的缺点,研发了一种挖坑效率高、成本低,且能够满足不同土壤条件、地形、坑深和坑径要求的新型植树挖坑机。该新型植树挖坑机以发动机为动力,代替了传统的拖拉机,从而降低了挖坑机的制作成本和占用空间,同时减少刀盘产生的侧压力对整机的影响,使刀盘工作阻力减小、可靠性提高、稳定性增强。本文利用有限元理论结合ANSYS软件,对挖坑机主要零部件挖坑机机架进行动静态分析,并通过试验验证其力学性能和可靠性。此方法对提高挖坑机的工作性能、开发效率、稳定性和可靠性,具有重要的指导意义。
1 新型植树挖坑机的工作原理
新型植树挖坑机侧俯视见图1,新型植树挖坑机俯视见图2,新型植树挖坑机换挡机构见图3。

图1 新型植树挖坑机侧俯视

图2 新型植树挖坑机俯视
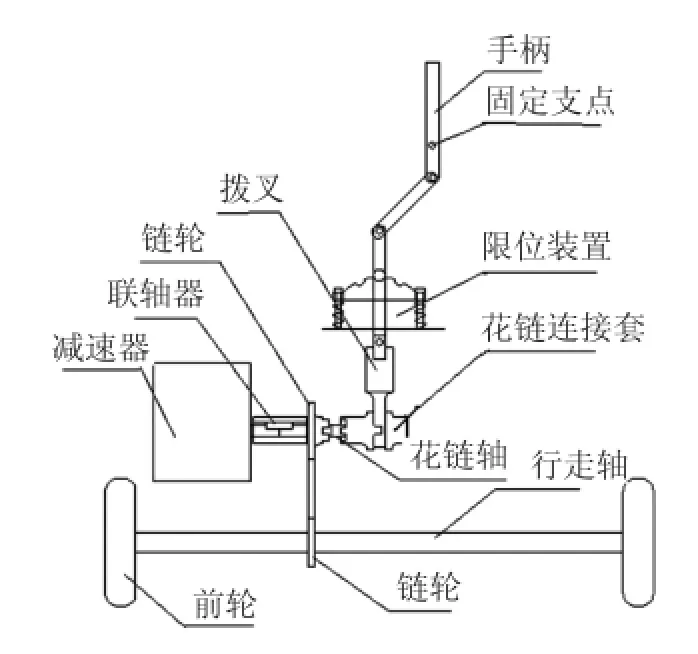
图3 新型植树挖坑机换挡机构
新型植树挖坑机包括动力机构、传动机构、行走机构、挖坑机构和机架。动力机构选用独立柴油机,柴油机与离合器通过皮带轮连接,经传动轴、花键轴、花键套带动刀盘机构转动,完成挖坑作业[1]。减速器输出轴经联轴器、花键轴、花键连接套带动链轮转动;花键连接套有空档和自动行走档位2个位置,可通过绕固定支点的手柄、限位装置和拨叉更换来实现不同的行走方式。
新型植树挖坑机行走有人工和自动2种方式。人工方式是通过人力经扶手、万向轮、行走轮将动力传递到挖坑机,从而实现行走运动。自动方式是手柄绕固定支点转动,经限位装置、拨叉,将花键连接套与链轮接触,再经减速器、链轮带动万向轮和前轮转动运动,实现自动行走运动。
2 组合式刀盘的力学分析

图4 组合式刀盘机构

图5 土壤质地的受力
组合式刀盘机构见图4,土壤质地的受力见图5。
新型植树挖坑机组合式刀盘机构由定位钻头、切削刀片、缺口圆盘和排土叶片4部分组成,其各部分功能为定位钻头用于定位,切削刀片用于切削土壤,排土叶片将切削下的土壤排出坑外,其特点是挖坑效率高、拆装方便、结构简单。工作时,螺旋式刀盘由发动机经离合器、传动轴、齿轮轴和齿轮套提供扭矩和轴向力,实现刀盘的垂直向下运动,通过定位钻头、切削刀片和土叶片完成挖坑作业[2]。
土壤质点的力学分析。可把刀盘的运动简化为质点的定轴转动,其受力如图5所示,F1为土壤质点X方向上的受力,F2为土壤质点Y方向上的受力。
通过实际测量,刀盘的质量m为9.86 kg(不考虑在工作时黏在刀盘上的土壤质量);通过对所挖土坑的观察,粗略估计R=0.003 m,由于柴油机是整机的重要动力源,而柴油机的频率为20 Hz,通过对样机在挖坑过程的观察,粗略估计刀盘的频率是柴油机振动频率的50%,即f=10 Hz,则角速度ω=2πf=2π。
若以X轴方向为起始位置,令转过的角度为θ,则:θ=ωt产生的惯性力Fr为:Fr=mrω2
则F1=Frcosθ=mrω2cos40πt=116.777 16cos(40πt)
F2=Frsinθ=mrω2sin40πt=116.777 16sin(40πt)
3 挖坑机机架的有限元分析
挖坑机机架是挖坑机的重要部件,对挖坑机挖坑的性能起到重要的作用。
(1)设定材料特性。根据结构参数,新型植树挖坑机机架采用45号钢制作材料。该材料参数为弹性模量E=2.02×105MPa,泊松比μ=0.3,密度ρ= 7.85×10-6kg/mm3,屈服极限σs=355 MPa。
(2)单元选择。基于新型植树挖坑机机架结构复杂的特点,选用三维实体SOLID92单元。其特点是该单元由10个点定义,每个节点有3个自由度:节点X,Y和Z方向位移,具有能够承受可塑性、大变形、膨胀和大张力的能力[3-4]。
(3)网格划分。根据挖坑机结构特点和精密度需要,采用智能划分网格方式,精密度取6级。
(4)有限元模型的建立。
机架的有限元模型见图6,挖坑机机架的应力云见图7。

图6 机架的有限元模型
图7 挖坑机机架的应力云
由图6可知,节点的数目为197 893,单元数目为77 716。
(5)添加载荷、约束求解。
加载:柴油机座支点处F11=1 107.031 08 N,F12= -1 068.604 78 N;皮带轮处竖直方向上分力F23= 1 008.53 N,水平方向分力F24=257.63 N;锥齿轮对处F35=F36=91.753 48 N,轴承座F47=1 535.77 N。
约束:将机架安装轮子处设为全约束。
(6)经有限元分析软件ANSYS计算得挖坑机机架的应力云。经有限元分析软件ANSYS计算得,机架的最大应力为58.9 MPa,小于屈服应力,发生在机架底部折弯处,满足强度条件。
(7)经有限元分析软件ANSYS计算得挖坑机机架的变形云。
挖坑机机架的变形云见图8,机架的一阶振动模型见图9。

图8 挖坑机机架的变形云
经有限元分析软件ANSYS计算得,挖坑机机架的最大变形为1.194 mm,发生在挖坑机机架的上端处,满足强度条件。

图9 机架的一阶振动模型
4 挖坑机机架的动态分析
机架的动态特性关系到新型植树挖坑机的操作性、稳定性和疲劳寿命,模态分析用于确定设计中机架的振动特性(固有频率和振型)[5]。
本文采用ANSYS中Block Lanczos法,该方法收敛快,适用于比较复杂的质量和刚度矩阵。由于高频振动幅度小,对结构的动力响应影响有限,本文取前五阶带预应力的模态。
机架的二阶振动模型见图10,机架的三阶振动模型见图11,机架的四阶振动模型见图12,机架的五阶振动模型见图13。
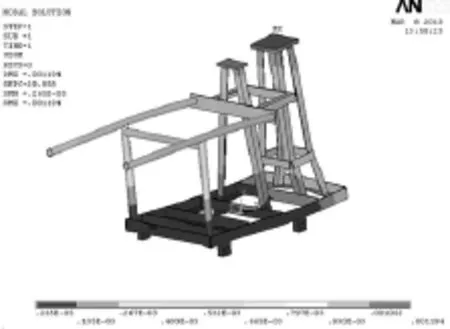
图10 机架的二阶振动模型
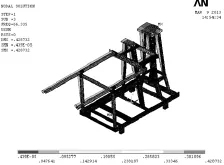
图11 机架的三阶振动模型
(1)机架一阶模态的频率为32.646 Hz,特点为机架整体前后摆动。
(2)机架二阶模态的频率为61.788 Hz,特点为机架前部基本不动,把手左右摆动。
(3)机架三阶模态的频率为70.777 Hz,特点为机架前部扭动,扶手左右摆动。
(4)机架四阶模态的频率为104.74 Hz,特点为机架前部左右微摆,扶手同相位上下摆动。
(5)机架五阶模态的频率为105.71 Hz,特点为整体机架几乎不动,扶手异相位上下摆动。
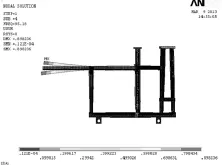
图12 机架的四阶振动模型

图13 机架的五阶振动模型
5 试验
(1)样机制造。本新型植树挖坑机通过车、铣、刨、磨、镗等一系列工艺。
新型植树挖坑机样机见图14。
(2)试验验证。试验验证是产品开发的重要手段,是证明理论正确性和产品可行性的重要方法。
挖坑实物图见图15。
由图15可知,新型植树挖坑机挖出的土大部分都在坑的周围,并且坑深具有很好的垂直性,能够满足挖坑功能。

图14 新型植树挖坑机样机

图15 挖坑实物图
6 结论
新型植树挖坑机能够满足功能要求,具有极大的推广价值;新型植树挖坑机机架能够满足强度要求、刚度要求和动态要求。
[1]濮良贵,纪名刚.机械设计 [M].第8版.北京:高等教育出版社,2005:41-43.
[2]黄仁楚,刘伟.挖坑机工作参数的研究钻头转速及土壤因子对功率消耗的阻力矩的影响 [J].东北林业大学学报,1987(5):15-18.
[3]赵均海,汪梦甫.弹性力学及有限元 [M].武汉:武汉理工大学出版社,2003:264-271.
[4]张朝晖.ANSYS 11.0结构分析工程应用实例解析 [M]. 第2版.北京:机械工业出版社,2008:37-48.
[5]宋天霞.有限元理论及应用基础教 [M].武汉:华中工学院出版社,1987:104-113.◇
The Static and Dynamic Analysis Based on Frame of the New Type Digging Machine for Planting Trees of Combined Cutter and Experimental Verification
LIU Tao1,*LOU Yuyin2,HUANG Wei3
(1.Food College,Xinyang College of Agriculture and Forestry,Xinyang,He'nan 464000,China;2.Lushan College,Guangxi University of Science and Technology,Liuzhou,Guangxi 545000,China;3.College of Mechanical Engineering,Guangxi University,Nanning,Guangxi 530004,China)
According to the shortcomings of traditional digging machine,this paper designs a kind of new digging machine which is pit of high efficiency and low cost and can meet the different soil conditions,topography,depth and crater size requirements.Through the finite element analysis and experimental verification,the results show the new type digging machine for planting trees that can meet the job requirements and the frame can meet the requirements of dynamic and static.
the digging machine for planting trees;the finite element;APDL
TG659
A
10.16693/j.cnki.1671-9646(X).2016.06.044
1671-9646(2016)06b-0057-04
2016-02-23
刘涛(1986— ),男,硕士,助教,研究方向为食品机械及可再生能源应用方面的教学与研究。
*
娄玉印(1983— ),男,硕士,助教,研究方向为机械系统动力学仿真研究。
猜你喜欢
机械工程师(2023年11期)2023-12-09 02:45:30
小猕猴学习画刊(2021年8期)2021-08-27 23:37:57
小学生学习指导(低年级)(2021年3期)2021-07-21 03:02:30
小天使·一年级语数英综合(2021年3期)2021-05-08 06:10:31
趣味(数学)(2020年5期)2020-11-16 01:29:54
小学生学习指导(低年级)(2019年3期)2019-04-22 03:34:26
隧道建设(中英文)(2017年10期)2017-11-07 07:21:13
浙江大学学报(工学版)(2016年11期)2016-06-05 09:21:03
小说月刊(2014年4期)2014-11-18 11:55:11
泰州职业技术学院学报(2014年5期)2014-02-28 17:10:33