
紧急状况下汽车油门防误踩安全辅助装置设计
2016-07-26 10:01强敏李军政陈昭君杨跃李满曹瑞玲
汽车实用技术 2016年6期
强敏,李军政*,2,3,陈昭君,杨跃,李满,曹瑞玲
(1.湖南农业大学工学院,湖南 长沙410128;2.现代农业装备工程技术中心,湖南 长沙 410128;3.南方粮油作物协同中心,湖南 长沙 410128)
紧急状况下汽车油门防误踩安全辅助装置设计
强敏1,李军政*1,2,3,陈昭君1,杨跃1,李满1,曹瑞玲1
针对小车驾驶员误踩油门事故频繁发生的现象,分析在紧急状况下误踩油门的产生原因及避免机制,以油门踏板不同状况下所受力作为误踩的判断依据,设计出一套油门与刹车联动的安全辅助装置。介绍了装置的整体结构与核心部件及其工作原理,计算并校核了主要工作部件。
棘轮棘爪;汽车安全;离心力
10.16638/j.cnki.1671-7988.2016.06.017
CLC NO.: U463.52 Document Code: A Article ID: 1671-7988 (2016)06-47-03
前言
近年来,随着家用汽车越来越普及,小车驾驶员误踩油门而造成的交通事故频繁发生[1],交通安全成为一个尤为突出的问题。目前已有防误踩技术主要是采用电子控制方式,有一定的实际意义,但是存在安装拆卸与更换不易,维护不方便等问题[2]。因此本文设计了结构简单,安装、拆卸方便的机械离心式油门防误踩装置。
1、整体结构设计
汽车安全辅助系统以飞锤,棘轮棘爪,离心盘为核心工作部件,主要由传动装置、复位装置、防误踩装置、联动装置和安全装置五部分组成,如图1所示。
其中传动装置是由由齿轮、齿条和输入轴组成。输入轴通过平键与齿轮相连,通过定位销与离心盘相连;复位装置是由波纹管和复位弹簧组成。复位弹簧分别套在齿条上;防误踩装置是由弹簧、飞锤固定座、棘爪和棘轮组成,如图 2所示。飞锤是防误踩装置的核心零件,与连杆相连,且与弹簧为面接触,在离心力作用下向固定座内侧沿连杆滑动,同时带动与其铰接的棘爪向外运动;联动装置由齿轮、齿条和输出轴组成。输出轴和传动盘通过销相连,和齿轮通过平键连接;安全装置由端口有螺纹的可调节轴通过螺丝与圆环固定连接,同时与输出轴、传动盘的内侧相连。
2、工作原理
驾驶员防误踩装置仅是对误踩信号的判断,当防误踩装置开始工作时,油门踏板失效,同时在联动装置的作用下,刹车踏板工作。当缓慢松开油门踏板时,在波纹管中的复位弹簧作用下,油门踏板和刹车踏板复位。

图2 离心式棘轮棘爪装置结构图Fig 2 Structure of Centrifugal ratchet device
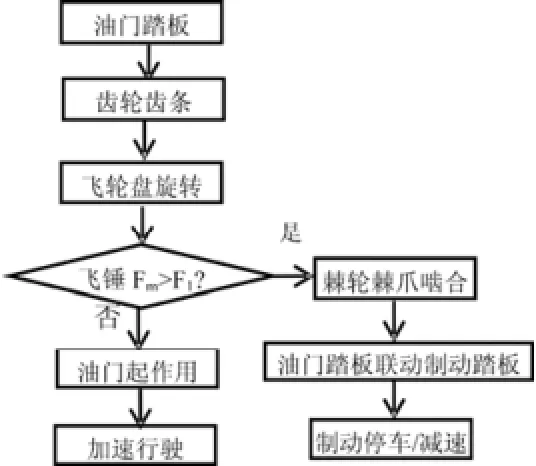
图3 汽车安全辅助系统工作原理图Fig 3 Automible assistance safety system's working principle
如想要关闭此辅助系统,只需启动安全开关即可。在开关轴旋转的过程中,圆环做圆周运动,当轴端截面上的圆环与飞锤相切时,飞锤位置瞬间固定。此时无论多大的离心力都不能使其沿固定座内侧运动,即棘爪无法向外部运动与棘轮啮合,装置切换到关闭状态。当需要重新开启此辅助系统时,反方向旋转开关轴即可,其工作原理如图3所示。
以小车油门踏板正常和紧急状况下受力大小不同,建立判断误踩的力学模型,设计出相应的防误踩装置。即在紧急状况下由于情绪紧张导致油门踏板力 F1远远大于正常情况下的踏板力F0,同时由F=ma可知,a1>>a0。因此根据F0< 图4 力学模型Fig4 Dynamic Modle 上式中m,mp分别为飞锤和棘轮质量,k为弹簧的弹性系数。m,mp,k为可控变量。弹力和离心力的产生是过程量,但是较大的加速度是由极短时间内受力作用产生的,故在实际计算中用平衡时的静力平衡计算。 踩下油门踏板时,与踏板相连的齿轮开始转动,齿轮齿条啮合带动输入轴旋转,从而带动与输入轴相连的离心盘旋转,根据油门踏板受力产生的加速度不同,使飞锤获得不同的离心力,克服弹簧力产生的作用行程不同,带动棘爪的运动也不同。 (1)正常情况下作用于油门踏板时: 其中Fm为离心力,F0为油门踏板力,F1为紧急状况下的油门踏板力,根据已知条件计算可得[6]: Fm<380N,a≤0.25m/s2 此时飞锤的离心力不足以克服弹簧力运动到棘轮棘爪啮合的临界点。 (2)紧急情况下作用于油门踏板时: 根据已知条件计算可得: a≥30m/s2 此时飞锤离心力克服压缩弹簧超过棘轮棘爪啮合的临界点,带动与其铰接的棘爪继续向外运动并最终与棘轮相互啮合。传动盘的旋转带动输出轴的转动,并通过齿轮齿条传动而使刹车踏板迅速工作。 3.1齿轮齿条 装置设计时,以湖南农业大学驾驶中心的大众新捷达为参考依据,测量计算得出齿轮齿条的安装高度需小于90mm,踏板的最大行程Lmax=45mm,取齿轮模数为2mm,齿数为34,计算[10]获得齿轮齿条的结构参数如表1所示。 表1 齿轮齿条的结构参数Table 1 Structural Parameters of gear and rack 棘轮棘爪啮合时,主要为弯曲和挤压作用力,因此从弯曲强度和挤压强度两个方面进行计算。一般来说,棘轮是强度储备比较充裕的零件,工作过程中不易损坏,按照公式进行校核计算后完全满足使用要求[6]。棘轮的使用周期长,可不考虑轮齿的接触疲劳强度,按弯曲疲劳强度计算,取踏板力F1'=300N[7],取棘轮齿数z3=34,材料选用铸铁。由公式: 式中:m-棘轮模数; T-棘轮所受的扭矩,T=F'*s; φ-齿宽系数; [σ]-棘轮轮齿材料的许用弯曲应力[8]。计算[9]获得棘轮的结构参数如表2所示。 表2 棘轮的结构参数Table 2 Structural Parameters of rachet 本文针对现有的油门防误踩装置的不足,基于正常和紧急状况下油门踏板力的不同,从机械角度设计出一款汽车安全辅助系统,可有效减小紧急状况下误踩油门事故的发生率。通过测量驾驶中心车辆的内部空间,计算出核心零件的主要尺寸,使本装置可以应用于实践中。本系统结构简单,安装、拆卸方便,实用,且设计人性化,同时可培养驾驶员的良好驾驶习惯。 [1] 金延东.防止误将油门当刹车[J].中国新技术新产品.2012:09. [2] 梅哲文,李晓佳,王明环,彭伟.汽车油门防误踩紧急装置[J].机械设计与制造.2010.10:201-202. [3] 余志生.汽车理论[M].北京:机械工业出版社,1996. [4] 张钦,金圭.汽车误踩油门纠错装置的设计[J].汽车电器, 2008.8: 04-06. [5] 贾佳鹏.防误踩油门装置的设计构想[J].汽车电器.2006.8: 9-10. [6] 蔡旻融,顾振宇,董占勋.基于非倾入行为监测技术的误踩油门踏板研究[J].微型机与应用, 2014.5:71-76. [7] 孙新杰.浅谈齿轮离合器设计[J].中国科技信息,2011(15): 111-116. [8] 郑宏宇,宗长富,高越.线控制动系统踏板力模拟研究[J].系统仿真学报,2008(2):1016-1019. [9] 邹慧君,殷鸿梁.棘轮机构设计[M].机械工业出版社,2012. [10] 濮良贵,陈国定,吴立言.机械设计[M]. 高等教育出版社,2013(5):191-216. Design of safety assistance device of anti-false stepping accelerator pedal in emergency Qiang Min1, Li Junzheng*1,2,3, Chen Zhaojun1, Yang Yue1, Li Man1, Cao Ruiling1 Absract: This paper analysed the reasons and solutions of the phenomenon of stepping mistakenly on the accelerator pedal in an emergency. Using different force applied on gas pedal in different conditions as a criterion to judge, a set of safety assistance device is designed for anti-false stepping on accelerator pedal that linked accelerator and brake pedals.It is introduced the whole structure and core mechanism as well as working principles.And it is calculated and verified the rationality of the main components. Ratchet and Pawl; Automobile safety; Centrifugal force 湖南省大学生研究性学习和创新性实验计划项目(SCX1517)。 U463.52 A 1671-7988 (2016)06-47-03 强敏,就读于湖南农业大学。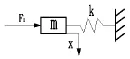



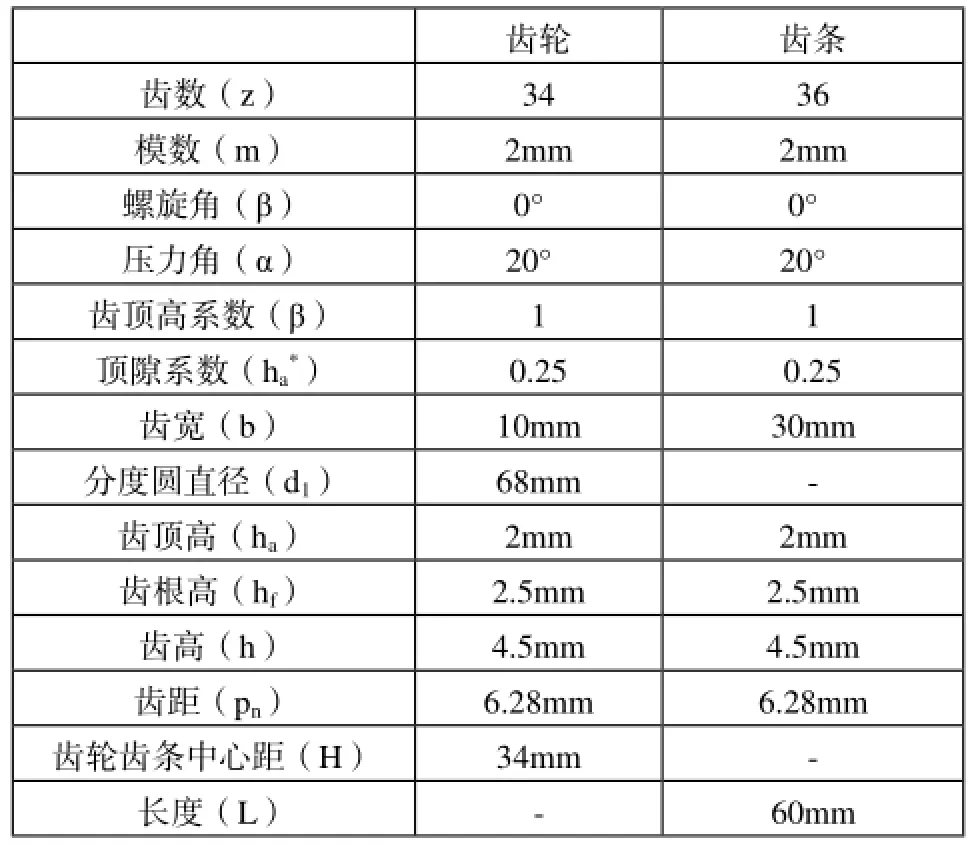
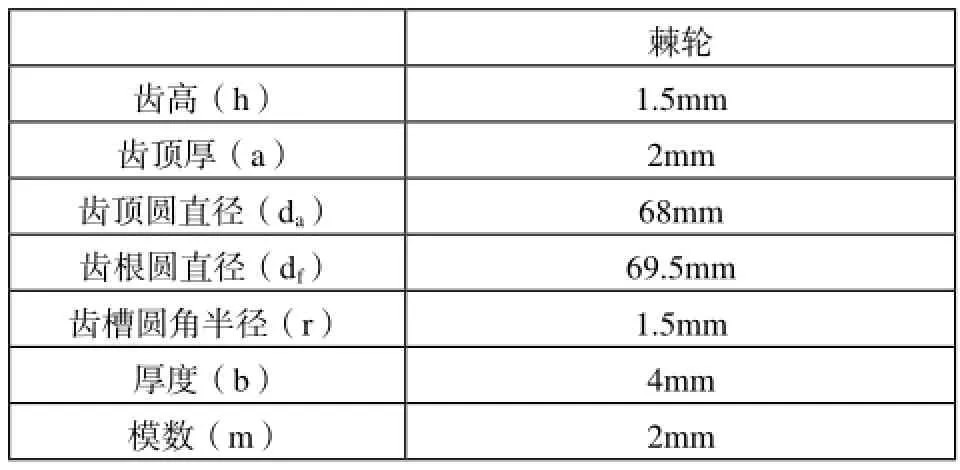
3、主要零件的设计计算

4、结论
( 1.College of Engineering, Hunan Agricultural University, Hunan Changsha 410128; 2. Hunan Provincial Engineering Technology Research Center for Modern Agricultureal Equipment, Hunan Changsha 410128; 3. Southern Regional Collaborative Innovation Center for Grain and Oil Crops in China, Hunan Changsha 410128 )
猜你喜欢
宁夏医科大学学报(2022年5期)2022-11-30
宁夏医科大学学报(2022年6期)2022-11-22
宁夏医科大学学报(2022年8期)2022-11-22
装备维修技术(2022年7期)2022-07-01
大型铸锻件(2022年1期)2022-02-12
东北大学学报(自然科学版)(2021年1期)2021-01-15
汽车零部件(2020年1期)2020-03-06
少儿科学周刊·少年版(2020年9期)2020-03-04
科技创新导报(2014年9期)2014-11-07
科技致富向导(2013年23期)2014-01-09
