
煤矿井下基于光纤陀螺的随钻测斜方法研究
2016-07-22 10:50张冀冠中煤科工集团西安研究院有限公司陕西西安710077
电子测试 2016年11期
关键词:煤矿
丛 琳,张冀冠(中煤科工集团西安研究院有限公司,陕西西安,710077)
煤矿井下基于光纤陀螺的随钻测斜方法研究
丛 琳,张冀冠
(中煤科工集团西安研究院有限公司,陕西西安,710077)
摘要:对于煤矿井下一些特殊环境,如磁性矿区域或钻机附近等,磁性测斜仪无法通过感应地磁场而确定钻孔方位角,可采用光纤陀螺代替磁性传感器完成测斜工作。本文主要基于惯性导航初始对准原理,完成了光纤陀螺随钻测斜方法研究,并通过仿真验证了该方法的正确性及有效性。
关键词:煤矿;光纤陀螺;测斜仪;初始对准
1 随钻测斜工作原理
基于陀螺的测斜系统是一种捷联式惯性导航系统,需要利用自寻北陀螺配合加速度计完成测斜仪角运动和线运动的测量,并完成测斜仪姿态解算。对于煤矿井下可用于测斜仪的自寻北陀螺主要为动调陀螺和光纤陀螺。动调陀螺体积小,成本低,但其抗振能力较差,尤其在断电情况下,不能满足钻孔震动强度要求。光纤陀螺是基于光学Sagnac效应的全固态角速度传感器,具有耐冲击、灵敏度高、功耗低等优点,是当前适合煤矿井下随钻测斜的理想惯性传感器。本文主要基于三轴光纤陀螺和三轴加速度计,完成煤矿井下随钻测斜方法研究。
2 随钻测斜解算方法
光纤陀螺随钻测斜方法主要基于惯性导航初始对准原理。导航坐标系n选取为地理坐标系(即东北天坐标系ENU),载体坐标系b沿三轴陀螺敏感轴方向,y轴沿仪器纵轴方向,z轴沿造斜方向,x轴与y轴、z轴垂直,并符合右手定则,如图1所示:
要确定测斜仪的姿态角(即倾斜角、方位角和工具面向角),只需确定载体坐标系b与地理坐标系n之间的关系,b系相对于n系的角位置可用姿态矩阵来表示:

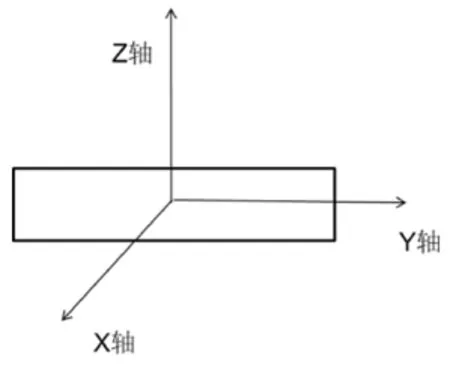
图1 测斜仪载体坐标系b
2.1精对准
粗对准完成后,必须要经过精对准才能得到较为准确的姿态角。精对准的方法是利用速度误差观测量驱动Kalman滤波对姿态等误差进行估计,并将估计量作为状态量对误差进行连续反馈。不考虑系统位置误差、天向速度误差和天向加速度计零偏的影响,建立十维系统方程可表示为:


选择速度误差作为观测状态矢量,建立系统观测方程可表示为:

式子(11)中,H为系统观测矩阵,V(t)为系统观测噪声。
对式子(8)(11)离散化后,可得:

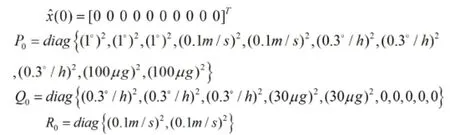
在离散时域内,利用Kalman滤波进行参数递推求解,滤波初始条件设为具体求解如下:

通过Kalman滤波方法,可以对系统状态参数进行估计,从而获得测斜仪姿态信息。在对准过程中,水平失准角主要受到水平加速度计零偏和的影响,而方位角主要受到东向陀螺漂移的影响,当滤波达到稳态后,失准角稳态误差如下:

3 仿真分析
下面给出静止状态下对准仿真条件:
300s初始对准Kalman滤波仿真曲线如图2所示:
从仿真图中可以发现:(1)仿真300s内,倾斜角,工具面向角及方位角均收敛,证明Kalman滤波对准方法可以快速的估计侧斜仪姿态角。其中,倾斜角和工具面向角的收敛速度较快,而方位角的收敛速度较慢,主要原因是天向加速度分量通过耦合作用引入水平速度,可作为Kalman滤波的外部观测信息,而方位角不能由速度观测量直接估计,所以方位角的收敛速度较慢些;(2)Kalman滤波对水平失准角的估计精度很高,而方位失准角的估计效果较差,主要是由于选用光纤陀螺随机漂移量较大的原因。
将300s仿真结果与式(19)(20)(21)计算的理想稳态误差进行对比,如表1所示。结果表明:(1)测斜仪失准角的仿真结果趋近于理论计算值,说明本文方法的正确性;(2)由于方位角的收敛速度较慢,所以300s内其对准误差较大,约为,东向和北向失准角基本为,三个角度误差均满足测斜系统对精度的要求,说明本文方法的有效性。
4 结语
本文基于捷联惯导初始对准原理,完成了煤矿井下陀螺测斜仪测量方法研究,并仿真验证了该方法的正确性及有效性。该系统在工作过程中不受电磁场干扰,可适应各种复杂煤田环境,且采用随钻工作方式,避免了二次送入测量步骤,对提高煤田开采效率、降低开采成本具有重要意义。可作为国内现有磁通门测斜仪的更新换代产品,具有广阔的市场前景。
参考文献
[1] 冯成涛,王惠南,刘海颖.基于虚拟结构的卫星编队机动控制[J].系统工程与电子技术,2011,33(1):143-145,156.
[2] 王晓迪.捷联惯导系统导航算法研究[D].哈尔滨:哈尔滨工程大学.2007.
[3] 王庭军.旋转式捷联惯导系统关键技术研究[D].哈尔滨:哈尔滨工业大学,2013.
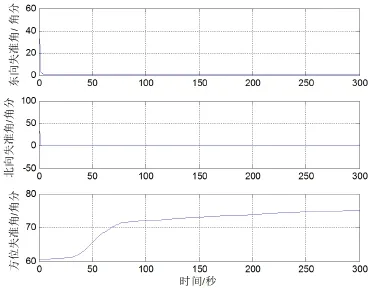
图2 Kalman滤波失准角误差曲线

表1 稳态失准角误差对比
陕西省工业科技攻关项目“基于光纤陀螺的煤矿井下电磁波无线随钻测量系统”(2015GY103)
Design of Method for MWD Inclinometer System Based on Fiber-Optic Gyroscope at Coal Mines
Cong Lin,Zhang Jiguan
(Xian Research Institute, China Coal Technology & Engineering Group Corp,Shaanxi Xi'an,710077)
Abstract:For some special circumstances at coal mines,such as magnetic region or nearby rig,magnetic inclinometer can not determine the azimuth by magnetic field,so fiber-optic gyroscope can be used to complete the inclinometer work.This article research the method for MWD(Measure While Drilling)inclinometer system based on fiber-optic gyroscope at coal mines through initial alignment,then simulate the verify and validity of the method.
Keywords:coal mine;fiber-optic gyroscope;inclinometer
猜你喜欢
选煤技术(2022年2期)2022-06-06
资源信息与工程(2021年5期)2022-01-15
活力(2021年4期)2021-07-28
煤矿爆破(2020年2期)2020-08-20
建材发展导向(2019年5期)2019-09-09
山东工业技术(2016年15期)2016-12-01
山东工业技术(2016年15期)2016-12-01
工业设计(2016年4期)2016-05-04
中外文摘(2016年4期)2016-03-17
三联生活周刊(2015年52期)2015-12-25
