基于红外探测器的输电线路山火监测方案
2016-07-22 10:31张臻,张琛
电力工程技术 2016年3期
张 臻,张 琛
(1.江苏省电力公司检修分公司,江苏南京,211102;2.武警上海消防总队,上海,200051)
基于红外探测器的输电线路山火监测方案
张臻1,张琛2
(1.江苏省电力公司检修分公司,江苏南京,211102;2.武警上海消防总队,上海,200051)
摘要:越来越多的特高压输电线路经过山林地区,为减少山火对特高压输电安全稳定运行的影响,提出了一种基于红外探测器的特高压输电线路山火监测方案。利用红外探测器检测出山火信号,基于数字信号处理器(DSP)的下位机山火监测系统实现一定区域内的山火信号采集,后台预警程序实现山火位置的显示。对模拟山火进行了测试,装置能对小范围内山火进行监测,并能够判断模拟山火的位置,是一种可行的特高压输电线路山火监测方案。
关键词:红外探测器;特高压输电线路;山火监测;远程测控终端
我国的能源资源和负荷分布决定了发电中心远离负荷中心,需要采用特高压远距离输电。与超高压输电线路相比,特高压输电线路走廊更宽。由于输电线路走廊受限,越来越多的输电线路经过山林区域。发生山林火灾,山火蔓延至输电线路下方时,造成空气热游离、局部空气密度下降、空气电导率增大、电场畸变,从而可能导致线路相地或相间击穿而引发跳闸事故。红外测温诊断技术可以及时发现电力设备缺陷,避免故障扩大事故[ 1 ],文中提出了一种基于红外探测器的特高压输电线路山火监测方案,通过对扫描区域内红外光谱的分析,实现了对小范围内输电线路山火的监测和预警。该方案与卫星遥感探火技术相比,不受云层、大气影响,测量精度更高,装置成本更低。
1 系统原理
地面物体由于具有不同的温度,而向外辐射不同波长的电磁波。物体温度T和辐射波长的关系遵循维恩位移定律[ 2,3 ]:

T为热力学温度,λ为辐射波长。由式(1)可见,物体温度越高,辐射波长越小,文中设计的山火监测系统采用碲镉汞红外探测器[ 4 ]检测波长3~5 μm的中红外光实现山火预警。碲镉汞红外探测器对3~5 μm波长的光线响应最强[ 5 ],可见光中的近红外光也会产生响应,但可以通过滤镜滤除。
该山火监测系统由风光互补电源对12 V蓄电池充电,蓄电池为整个装置提供电源。装置扫描半径5 km的区域,通过红外探测器,将光物理量转换成电压量,通过信号调理电路调理后,由控制芯片模数转换模块(Analog-to-Digital Converter, ADC)对电压模拟量进行采集,将采集到的数据通过串口传给无线远程测控终端 (Remote Terminal Unit, RTU),RTU通过无线通信将数据传给上位机,在后台客户端生成一幅黑白的电子信息地图。山火探测系统每5 min对监测范围内进行一次扫描,如果探测到山火,控制芯片将起火点的位置数据传输给后台客户端,并在客户端的电子地图上显示起火点的位置,并发出报警信息通知值班人员[ 6 ]。
2 下位机控制部分设计
2.1系统结构
下位机控制系统选用低成本浮点TMS320F28062芯片,时钟频率为90 MHz,具有很高的性价比和出色的数字信号处理器(Digital Signal Processor, DSP)控制功能。芯片采用单电源供电,使得印刷电路板(Printed Circuit Board, PCB)的设计更加简单方便。
红外探测器将光物理量转换为电压量,通过信号调理电路后由DSP芯片的ADC模块进行采样,完成数据采集的过程[ 7 ]。控制系统在扫描状态时将监测范围内的物体温度数据转换为8位的灰度值后,将灰度值数据传输到后台程序绘制电子地图。当监测到火灾点时,控制系统开始进入预警状态,将出现山火的坐标发送给后台程序。
DSP IO引脚通过电平转换芯片将电压转换为5 V后,通过双H桥电机驱动芯片L298N驱动直流电机[ 8 ]。DSP控制滤镜电机在预警状态下滤除可见光中近红外光的干扰,控制步进电机和转镜电机采集X轴和Y轴上的物体温度数据。雨刷电机用于定期为镜面清灰。光电开关通过高低电平的变化将电机的位置信息反馈给DSP芯片。DSP控制芯片通过485通信将灰度值数据、火灾点坐标传输给RTU,同时接收RTU发送的控制命令。RTU通过无线和上位机连接,从而和后台程序进行通信。
2.2滤镜电机的控制
如图1所示,滤镜电机的转子带动固定在转子上的支杆转动,默认位置为扫描状态,滤镜转至光电开关3的位置。当监测到火灾点时,进入预警状态,将滤镜沿路径1转至中间位置,通过滤镜滤除可见光线中近红外光的干扰,使得预警时只识别火焰中波长为3~5 μm的光信号。此时光电开关4被挡住,由DSP的IO引脚检测到电平变化后,控制滤镜电机停止转动。当预警状态结束后,滤镜电机反方向沿路径2回到扫描状态的位置。

图1 滤镜电机带动滤镜转动示意图
2.3步进电机的控制
DSP通过控制步进电机转动采集X坐标轴方向的物体温度数据,步进电机选用两相四线减速步进电机,工作在八拍工作方式[ 9 ],驱动波形如图2所示。

图2 步进电机八拍工作方式驱动波形
步进电机步距角θ为1.8°,内置减速机构减速比M为 19.2 : 1,外接减速齿轮减速比 N为 100 : 27= 3.703 7。步进电机转动一个步距角θ,对应主轴转动角度θ主轴为:

经计算,主轴转动角度为0.025°。所以,主轴旋转180°,对应步进电机旋转步数为180/0.025 =7200步。步进电机每旋转2步,进行一次光信号的采集。扫描状态下,在X坐标轴方向上,采集7200/2 =3600个点的灰度值。
2.4转镜电机的控制
转镜连接的无刷直流电机以恒定的转速旋转,如图3所示,转镜旋转一周中,采集光信号的有效区域对应角度为90°,无效区域对应角度为270°。转镜的位置信号通过光栅采集到DSP中,光电开关1用于判断转镜电机的零位点,光电开关2和码盘、光栅用于判断转镜电机的位置。所选光栅为100线,光栅每转过1线,即转镜转过3.6°,光电开关产生一个脉冲输出。当转镜转到θ时,进入有效区域,在θ: θ+45°和θ+ 135°: θ+180°角度范围内,进行Y坐标轴方向的温度数据采集。
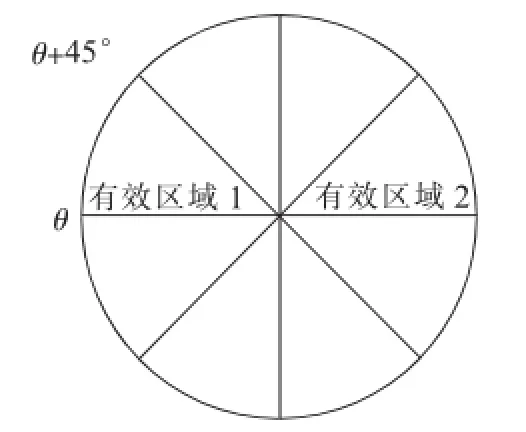
图3 转镜电机测量有效区域
在转镜电机无效角度范围内,步进电机需要完成步进2步,所以步进电机驱动脉冲时间和转镜电机转动周期T2之间需要满足关系:

在有效区域内,设计DSP对光信号进行采样3200个像素点,完成Y坐标轴方向上灰度值的采集。
3 后台处理程序设计
如图4所示,控制板和RTU采用458通信,RTU和上位机采用通用分组无线服务技术(General Packet Radio Service, GPRS)无线通信。GPRS通信速度快、通信费用低、组网灵活[ 10 ],通过GPRS无线网络使得监测中心可以对监测范围内山火情况进行集中监控,实现了无人值守。

图4 下位机控制部分、RTU和后台程序的通信方式
由于单个山火监测装置监测范围较小,实际使用可以采用分布式结构,根据每个山火监测装置的探测范围,将多个山火探测装置探测到的数据通过上位机集中显示。基于Visual C#的后台程序通过调用RTU设备的GPRS动态链接库函数实现对设备的识别、侦听以及指令发送,通过多线程实现对多个设备的访问,将接收到的灰度值数据绘制成灰度图,绘制出扫描范围内的电子信息地图。发生火灾时,由DSP将山火位置的X轴和Y轴位置信息发送给后台程序,后台程序在灰度图对应位置显示火灾点,并发出报警信息通知值班人员。
4 实验结果
山火监测系统样机如图5所示,电源板为控制板、电机、光电开关提供隔离电源,控制板实现了电机的控制、光电信号、模拟信号的采集以及数据的传输。步进电机带动转台沿X轴方向旋转,转镜电机带动转镜采集Y轴方向的光信号。
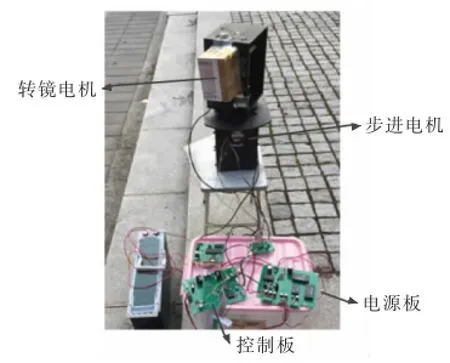
图5山火监测系统样机
图6为碲镉汞红外探测器对火焰和可见光的响应,通过滤镜可以滤除对可见光的响应。转镜电机转速为12.5 r/s,对应红外探测器的响应波形周期为80 ms。图中碲镉汞红外探测器对可见光响应的宽度为10 ms,即转镜电机扫描一侧的有效区域对应角度为45°。

图6 碲镉汞红外探测器响应波形
在1 km外采用实验火焰对山火监测装置进行了测试,上位机保存的灰度如图7、图8所示。图7对应图3中有效区域1,图8对应图3中有效区域2。上位机程序根据DSP采样到光模拟量信号对应的灰度信号,能够准确判断出火灾点。如图8所示,DSP根据步进电机和转镜电机的转角值对应火灾点在平面区域内的坐标,在后台程序中显示模拟火灾点的位置。
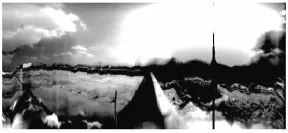
图7 山火监测装置监测有效区域1灰度

图8 山火监测装置监测有效区域2灰度
5 结束语
在提出基于红外探测器的特高压输电线路山火监测方案的基础上,对山火监测系统的各部分硬件进行了设计。通过模拟山火的试验验证了山火监测方案的正确性和可行性。该装置精度较高、成本较低,能够判断出山火位置,可以在有微小火灾的时候及时发现、处理,防止山火扩大,有助于减少因山火造成的跳闸事故,提高电网运行的稳定性,具有很大的发展空间和应用前景。
参考文献:
[1] 张 扬. 一例红外测温技术诊断220 kV隔离开关过热缺陷[J].江苏电机工程,2012,31(5):21-22,24.
[2] 叶立平,陈锡阳,何子兰,等. 山火预警技术在输电线路的应用现状[J]. 电力系统保护与控制,2014,42(6):145-153.
[3] 李广凯,王庆红,高松川. 山火条件下架空输电线路闪络及监测技术的研究现状分析[J]. 电测与仪表,2014,51(20):122-128.
[4] 王成刚,孙 浩,李敬国,等. 双色碲镉汞红外焦平面探测器发展现状[J]. 激光与红外,2009,39(4):367-371.
[5] 王 俊. 碲镉汞红外探测器光电响应特性的机理研究[D]. 合肥:中国科学技术大学,2012.
[6] 田 涛,陈昊,徐晶冉,等. 变电站智能现场报警装置的研究设计[J]. 电工电气,2015(5):29-32.
[7] 田 涛,陈 昊,张建忠,等. 基于智能理论的高压断路器机械故障诊断[J]. 江苏电机工程,2014,33(6):12-15.
[8] 程章格,谷若雨,王海波,等. TMS320F28027与L298N的悬挂运动控制系统设计[J].单片机与嵌入式系统应用,2014(5):49-51,55.
[9] 陈志聪. 步进电机驱动控制技术及其应用设计研究[D]. 厦门:厦门大学,2008.
[10] 成春旺. 监控系统中基于GPRS的无线数据传输系统的研究与实现[D]. 北京:北京邮电大学,2006.
张臻(1989),男,江苏南京人,硕士,从事特高压电网运维工作;
张琛(1989),男,江苏南京人,硕士在读,主要研究方向为嵌入式、云计算和人工智能。
Method to Forest Fire Monitoring Based on Infrared Detector
ZHANG Zhen1, ZHANG Chen2
(1. Jiangsu Electric Power Company Maintenance Branch , Nanjing 211102, China;2. Shanghai Armed Police Corps, Shanghai 200051, China)
Abstract:More and more UHV transmission line pass through forests. A method of forest fire monitoring based on infrared detector is proposed to reduce the influence of forest fire to the stabilization of UHV transmission. The signal of forest fire is detected by infrared detector and sampled by DSP based equipment. The location of forest fire is displayed by a background program. A virtual forest fire is detected. It is proved that the equipment can monitor forest fire in a certain area and the method is practicable.
Key words:infrared detector; UHV transmission line; forest fire monitoring; remote terminal unit
中图分类号:TM755
文献标志码:B
文章编号:1009-0665(2016)03-0057-03
作者简介:
收稿日期:2015 -12-24;修回日期:2016-02-01