工况紧急程度对驾驶员避撞行为的影响
2016-07-22 07:40王雪松朱美新
同济大学学报(自然科学版) 2016年6期
王雪松, 朱美新, 陈 铭
(同济大学 道路与交通工程教育部重点实验室,上海 201804)
工况紧急程度对驾驶员避撞行为的影响
王雪松, 朱美新, 陈铭
(同济大学 道路与交通工程教育部重点实验室,上海 201804)
摘要:利用同济大学8自由度高仿真驾驶模拟器研究了临撞工况紧急程度对驾驶员避撞行为的影响.通过不同初始车头时距(<1.0 s, [1.0 s,1.5 s), [1.5 s,2.5 s])和不同前车减速度(0.30g, 0.50g, 0.75g)的组合,建立了不同紧急程度的前车减速临撞工况,运用驾驶员感知反应时间、油门释放反应时间、制动转移时间、制动延误、最大刹车踏板压力、最大减速度等指标比较了不同紧急程度下避撞行为的差异.结果表明,①随着工况紧急程度的增加,驾驶员更快地释放油门及达到最大刹车踏板压力,并且施加更大的制动力度;②当初始车头时距为1.5 s左右时,驾驶员感知反应时间约为1.2 s,而当初始车头时距增大到2.5 s以上时,感知反应时间变得非常大,甚至达到了3 s;③驾驶员开始释放油门与开始制动间的转移时间不受工况紧急程度影响,保持在0.8 s附近;④在低紧急程度下,驾驶员表现出多阶段刹车行为,使得驾驶员需要更多的时间才能达到最大刹车踏板压力.
关键词:追尾事故; 避撞行为; 感知反应时间; 制动延误; 工况紧急程度; 驾驶模拟器
追尾事故在事故总数中所占比例非常高,在国外,占25%~40%[1];在上海,占20%,而在高速公路和隧道中,上升到49%和67%[2].导致这类事故发生的主要原因有2个:一是车距过近以致驾驶员没有及时作出反应;二是驾驶员在避险的过程中刹车力度不够[3].研究驾驶员在临撞工况下的反应及刹车行为(即避撞行为)对于建立刹车曲线模型、避撞预警算法等有着重要作用.
驾驶员的避撞行为受多种因素影响:如驾驶员的预期、性别、年龄及认知负荷等[4],工况的紧急程度是其中之一[5],但已有研究并未对不同紧急程度下的避撞行为作系统的探讨.本研究利用同济大学8自由度高仿真驾驶模拟器,通过调整初始车头时距及前车减速度来设置不同紧急程度的临撞工况,系统探究工况紧急程度对驾驶员避撞措施选择、感知反应时间、制动前反应序列、制动后反应序列以及制动力度的影响.
1研究综述
驾驶员避撞行为可以分为2个阶段:制动前反应过程和制动后减速过程.制动前反应过程的重要参数为感知反应时间,其定义为前车开始制动至后车驾驶员开始采取制动或转向措施所需要的时间.感知反应时间反映了驾驶员感知到危险并采取避撞措施的快慢,是前向避撞预警及事故重建所需的重要参数[6].但已有研究得到的感知反应时间差异非常大,变化范围达到了0.5~10 s[7].不同研究在试验方法上的差异是导致得到的感知反应时间不一致的一个原因,另一个原因则是由于感知反应时间本身受到多种因素的影响,包括驾驶员的预期、性别、年龄及认知负荷等[4].
临撞工况的紧急程度是影响驾驶员感知反应时间的重要因素[5].已有研究主要通过2类指标来衡量工况的紧急程度:一类是工况触发时两车的时空关系,如工况触发时两车的距离、车头时距、碰撞时间;另一类是避撞过程中两车接近的快慢,如前车减速度.基于第1类指标,Liebermann等[8]测试了驾驶员在2种不同的跟车距离(6 m和12 m)及跟车速度(60 km·h-1和80 km·h-1)下的感知反应时间,发现跟车速度对感知反应时间并无影响,而跟车距离越近,驾驶员反应更快.基于第2类指标,Hulst[9]测试了驾驶在2种不同的前车减速度(1 m·s-2与2 m·s-2)下的感知反应时间,发现前车减速度越大,驾驶员反应越快.
值得注意的是,既有研究并未将衡量工况紧急程度的2类指标结合起来探讨其对驾驶员避撞行为的影响.考虑到这2类指标分别从工况初始状态和工况中间过程2个不同的角度反映了工况的紧急程度,有必要将二者结合起来系统地探究工况紧急程度对避撞行为的影响.
制动后避撞行为包括制动力度、制动至最大刹车踏板压力所需时间等.目前,针对该方面的研究只是提出了相关的指标但没有分析工况紧急程度对其的影响.对驾驶员刹车行为的研究发现,驾驶员在开始制动后,并不是立即达到最大制动力度,而是存在一定的延误[6].同时,驾驶员(尤其是不熟练驾驶员)在临撞工况中经常未能施加足够的制动力度从而导致事故.研究工况紧急程度对驾驶员制动延误及制动力度的影响对理解驾驶员的刹车行为、建立刹车曲线模型等具有重要意义.
2临撞工况试验
2.1试验人员
共招募了29名持有驾照的驾驶员参加了“临撞工况下驾驶行为试验”,驾驶员年龄分布在23岁至54岁之间(平均值33,标准差8.7),其中男性23名,女性6名.有4位驾驶员在试验过程中出现轻微不适症状,因此补充了4位驾驶员作为替代者,所有驾驶员的行驶里程均超过了1万km.
2.2试验设备
同济大学驾驶模拟器硬件系统由驾驶舱和运动系统组成.其中运动系统具有 8个自由度(6Z自由度、XY横纵向工作台),XY横纵向工作台的活动范围分别为5 m,20 m;驾驶舱为球穹顶封闭刚性结构,由仿真轿车与投影系统组成.仿真轿车内饰齐全,车型为Renault Megane Ⅲ,去除发动机、保留轮胎,加载其他设备如方向盘、刹车、换档的力反馈系统和数据的输入输出设备,后视镜由3块LCD屏幕组成.投影系统由5个分辨率为1 400×1 050、刷新率为60帧·s-1的投影仪组成,场景投影到球形幕上,水平视角为250°.驾驶模拟器控制软件为法国OKTAL公司开发的商业软件SCANeRTM.系统整体见图1.

图1 同济大学驾驶模拟器
2.3测试工况与条件
试验中测试了发生频率高且最易造成危险的一类前向临撞工况:前车突然减速工况.工况触发前,两车处于稳定的匀速跟车状态(相对车速、车头时距均在稳定范围内).工况触发时,前车突然以固定的减速度制动至停止状态,形成危险的临撞工况.采用3种前车减速度条件(0.30g, 0.50g, 0.75g)和2种初始车头时距条件(<1.0 s, [1.0 s,1.5 s), [1.5 s,2.5 s]),最终形成共3×3=9种不同紧急程度的试验测试条件.
2.4试验流程
2.4.1基础信息采集
测试驾驶员到达驾驶模拟器实验室后,首先在工作人员的辅助下了解试验基本过程、驾驶任务以及试验中可能涉及到的安全因素,并填写试验知情同意书和驾驶员调查问卷.
2.4.2模拟器试驾
试驾环节旨在帮助测试人员在短时间内熟悉模拟器,包括基本操作练习、跟车练习及刹车练习.试驾场景采用城市道路数据库,场景中加入适当社会车辆提高真实度.基本操作练习中包含了启动、加减速、停车、转向(左右各1次)以及变道(左右各1次)练习;跟车练习中选取长约1.5 km的直线路段,要求驾驶员跟随前方车辆行驶,车速约为80 km·h-1.在跟车过程中,屏幕上方显示驾驶员当前跟车距离,驾驶员可以根据需要不断改变与前车的距离,以熟悉在模拟器中对前车距离的感知;在刹车练习中,驾驶员首先被要求加速至100 km·h-1,并尝试保持该车速,直至看到前方停止的轻型货车,驾驶员需要按照其正常驾驶的习惯将车辆安全、平稳地停止在前车后方.
2.4.3正式试验
试驾试验之后,如果驾驶员没有任何模拟器眩晕的迹象,将在5 min的休息时间后开始正式试验.试验全程通过4个车载摄像头监视驾驶员心理与生理状态,如图2a.
正式试验场景选择一条四车道、平原沿海高速公路,天气晴朗、视野良好、对向车流较少,如图2b.驾驶员首先被要求加速到120 km·h-1,并且行驶在内侧车道,为了减少对驾驶员的干扰,同向相邻车道上未设置背景交通.约2 min后,一辆白色前车会切入到模拟器车辆前,并保持在120 km·h-1的速度稳定行驶.此时测试驾驶员需要跟随前车行驶,保持车距在60~80 m,如果驾驶员与前车车距超出了系统设定的最大值(100m),那么屏幕上方将显示“Speed Up”的提示信息,帮助驾驶员更好地进入跟车状态.在试验全程中,前车会在不同车头时距(1.5 s, 2.5 s)以不同前车减速度(0.30g, 0.50g, 0.75g)6次减速至静止,形成前车突然减速临撞工况.每次工况发生的时间间隔不等,大约为3 min,且都在初始车头时距条件满足时才触发.为了使驾驶员更难预期到前车的减速行为,采用了一些干扰措施,如设置前车尾灯亮起但并不发生减速.试验中,驾驶模拟器以20 Hz的采样频率记录车辆速度、油门开度、方向盘转角、刹车踏板压力等数据.
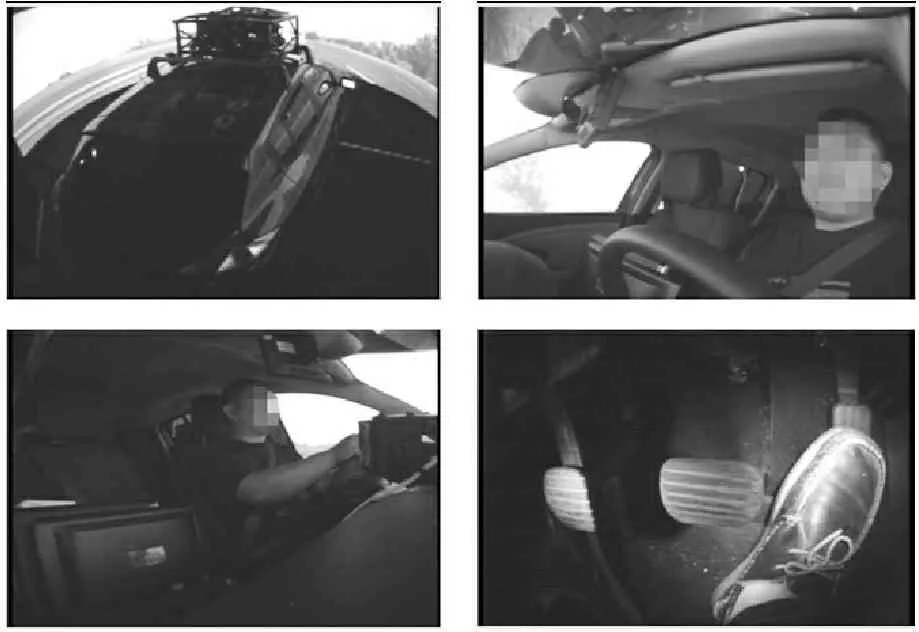

b 试验场景
2.5试验因变量
一个典型的刹车避撞过程可以描述为:前车突然减速、驾驶员察觉危险、释放油门踏板、开始刹车、持续减速、刹车至最大压力、成功避险或发生碰撞.这一过程可以通过图3表示,该图显示了避撞过程中各项参数的变化曲线,包括前后车车速、本车减速度、刹车踏板压力以及油门开度等.
同时,图中标识出了用以提取避撞行为参数的关键时刻:工况触发(A),后车开始释放油门(B),后车完全释放油门(C),后车开始制动(D),后车制动至25%踏板压力(E),后车制动至50%踏板压力(F),后车制动至最大踏板压力(G),后车最大刹车踏板压力(H),后车最大减速度(I). 通过提取关键时刻的驾驶行为参数,系统地描述驾驶员避撞行为.提取如表1所示避撞行为参数进行分析.
图4示意了部分避撞行为参数的定义及它们之间的关系.
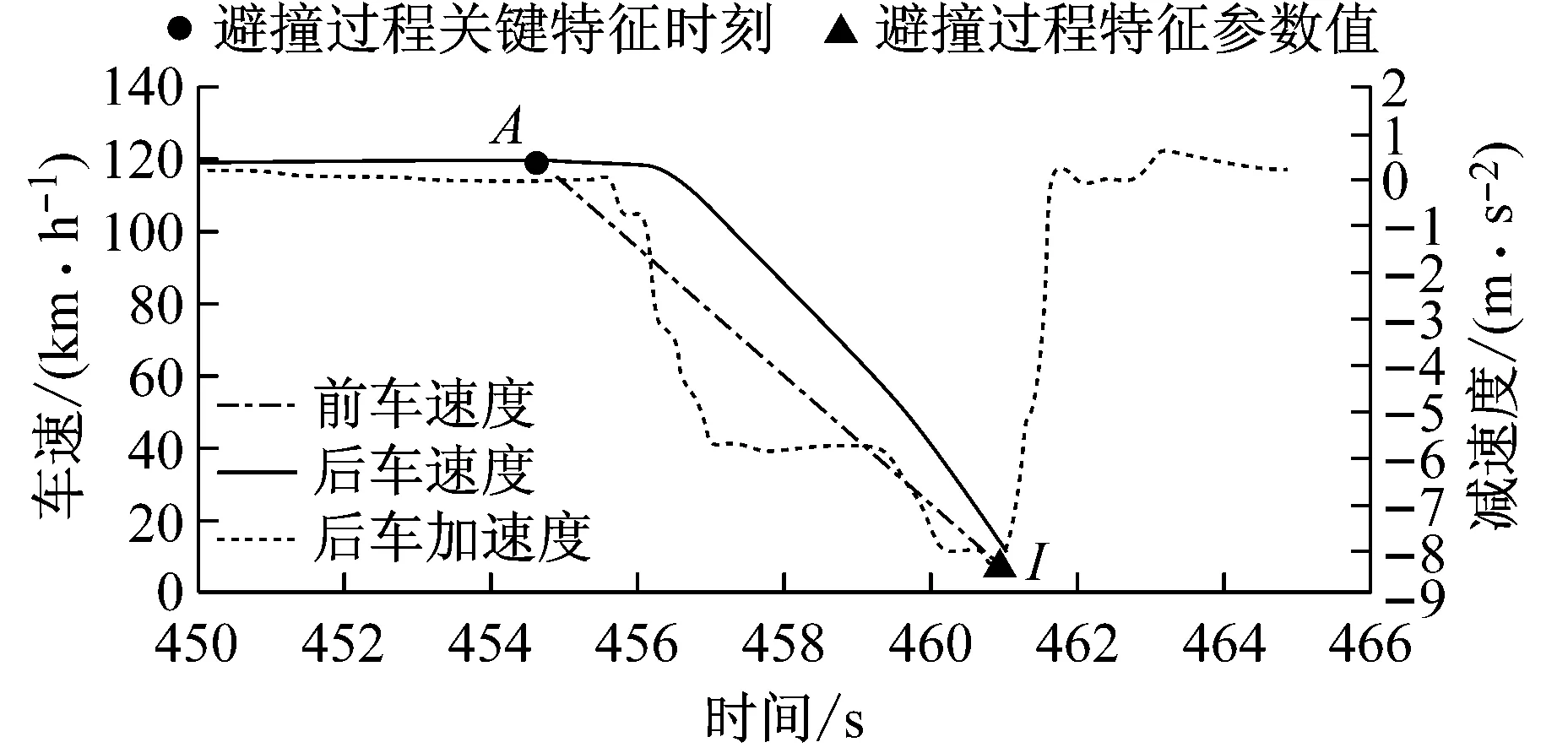
a 避撞过程中速度及减速度变化
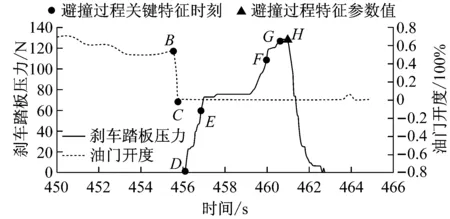
b 避撞过程中刹车踏板压力及油门开度变化
3试验结果与讨论
试验共采集174(29×6=174)个追尾临撞工况的数据,其中,1个工况存在数据缺失,另有32个工况中出现了驾驶员在前车开始制动前释放油门的情况.在提前释放油门的工况中,无法确定工况的触发时刻,进而难以量化工况紧急程度及驾驶员反应时间.因此,只有141个工况的数据用于本文的分析.
驾驶模拟器试验中,通过设计不同等级的初始车头时距(1.5 s与2.5 s)和前车减速度(0.30g, 0.50g和0.75g),产生了不同紧急程度的临撞工况.实际采集得到数据中事件触发时的车头时距并不与设计的完全一致,因此将车头时距条件重新划分为“<1.0 s”, “[1.0 s,1.5 s)”和“[1.5 s,2.5 s]”,分别对应小(S)、中等(M)和长(L)车头时距条件.
利用方差分析探究不同紧急程度下驾驶员避撞行为的差异,置信度设置为0.01,初始车头时距及前车减速度作为组内变量.每位驾驶员均测试了6种临撞工况,为了探究工况次序对避撞行为的影响,将工况发生的次序也作为一个组内变量进行分析.驾驶员作为随机效应,以考虑不同驾驶员驾驶行为的差异.方差分析中对驾驶员的年龄、性别、驾驶经验进行了考虑,但未将结果在本文中呈现.
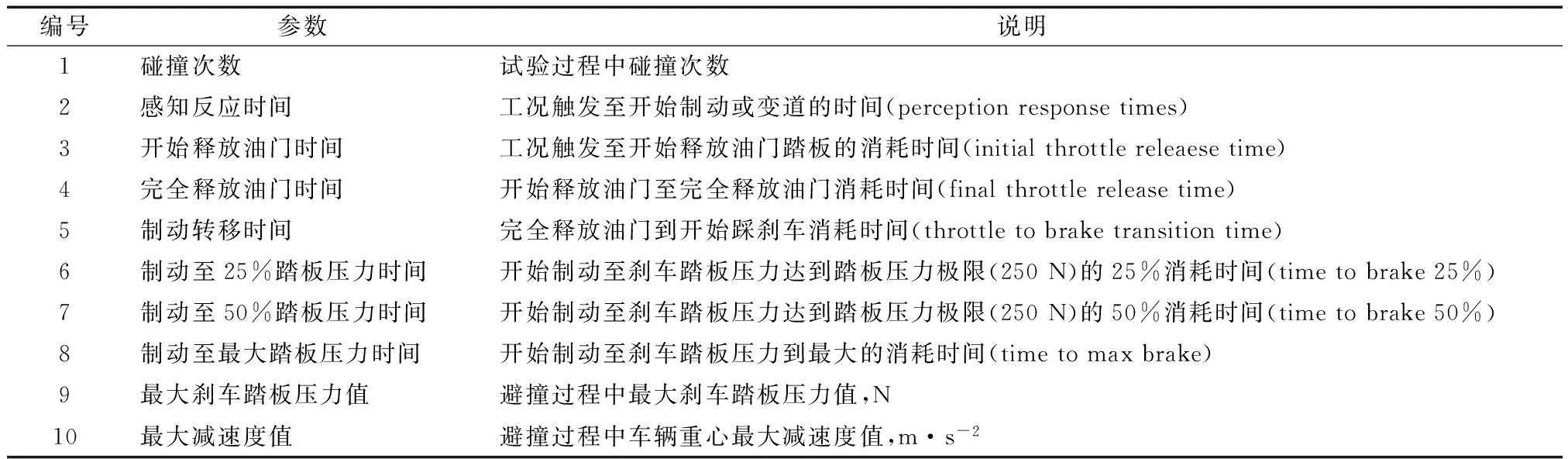
表1 试验因变量定义

图4 避撞行为参数示意
3.1制动/变道选择与事故率分布

图5 不同避撞方式工况总数及事故率
驾驶员经历临撞工况时,既可以采取制动避撞,也可以采取转向避撞,或者采取两者结合的方式进行避撞.图5展示了不同避撞措施下的工况数以及事故率.驾驶员在绝大部分(85%)的情况下仅通过制动去避撞,剩余的15%的情况下会采取制动与转向结合的方式进行避撞,没有驾驶员采取仅转向的避撞方式.若采取仅制动避撞,其事故率约为30%,而采取制动与转向结合的方式进行避撞,事故率为零.这一制动与转向结合方式的低事故率与实际情况存在差异(实际中制动与转向结合方式事故率较高[10]),可能是因为:①采取制动与转向结合避撞方式的工况本身较少;②模拟器试验中未在同向相邻车道上设置背景交通.
Adams[10]总结11个临撞工况下避撞方式相关的研究,也发现驾驶员在临撞工况下更倾向于采取制动来避撞.这可能是转向避撞方式对驾驶员的操作要求更高(驾驶员需要留意相邻车道的交通状况),造成仅有少数驾驶员采取转向避撞方式.
图6展示了在不同车头时距和前车减速度下事故的分布情况.随着前车减速度增大,事故率随之变大,并且幅度远大于初始车头时距改变所引起的事故率增长.原因可能是因为驾驶员对前车减速度的变化敏感度较低,判断危险程度更多的是根据车头时距.
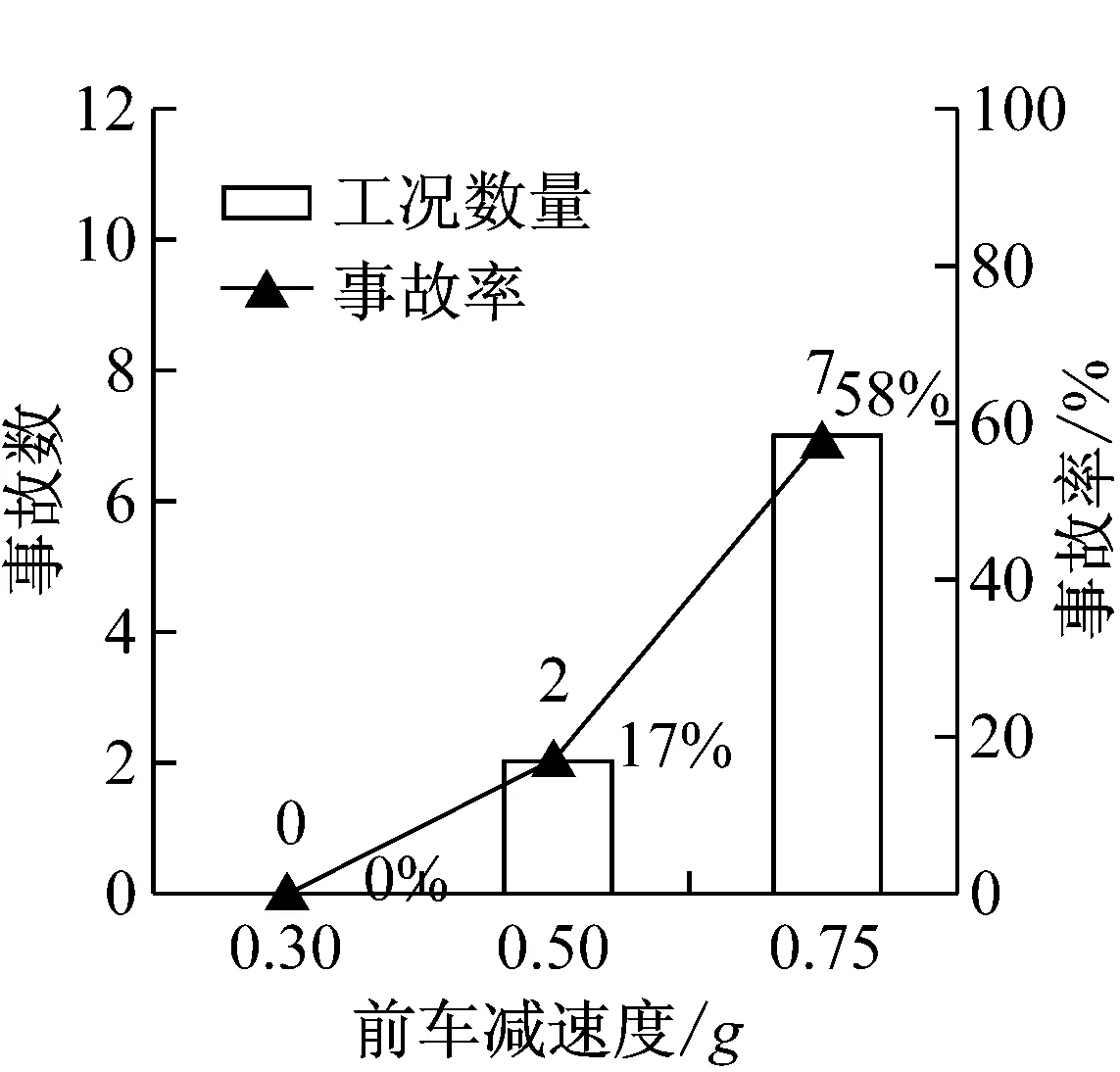
a 长初始车头时距

b 中等初始车头时距

c 短初始车头时距
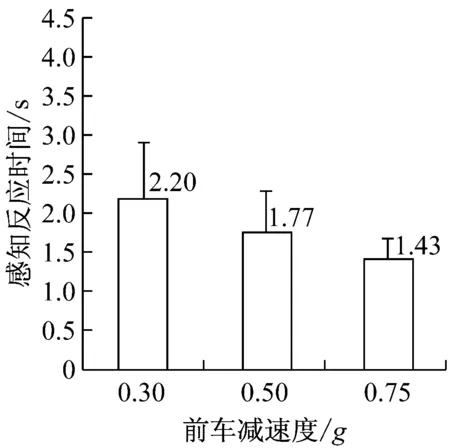
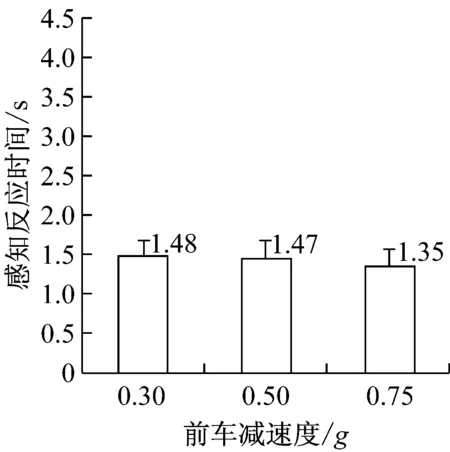
3.2感知反应时间
感知反应时间反映了前车开始制动后驾驶员感知到危险并采取制动或转向措施需要的时间.图 7展示了不同车头时距和前车减速度下感知反应时间的均值.感知反应时间随着前车减速度的增加而减小,随着车头时距的减小而减小,即当工况的紧急程度越高时,驾驶员的感知反应越快.基于方差分析,初始车头时距(F[2,99]=26.54,P<0.000 1)和前车减速度(F[2,99]=6.47,P=0.002 3)均对感知反应时间具有显著影响.此外,工况发生的次序(F[5,99]=4.81,P=0.000 6)也显著影响感知反应时间:在驾驶员经历的6次工况中,第1次工况中的感知感应时间比后续工况中的感知反应时间平均长0.67 s.
表2汇总了已有研究中报道的感知反应时间的值,所有研究按照工况的初始车头时距从小到大排列.表中所有研究均基于驾驶模拟器展开,临撞工况类型均为前车突然减速;文献[13]和[15]中的感知反应时间及油门释放时间是从论文图片中估计的,因为文章中并未列出具体的数值;油门释放时间为开始释放油门时间加完全释放油门时间.概括起来看,当初始车头时距在1.5 s附近时,感知反应时间约为1.2 s,而当初始车头时距增大到2.5 s以上时,感知反应时间变得非常大,甚至达到了3 s.由此可以看出感知反应时间受初始车头时距影响较大.
3.3制动前反应序列
制动前反应序列由开始释放油门时间、完全释放油门时间、制动转移时间组成.图8展示了不同车头时距和前车减速度下制动前反应序列的均值.
根据图8,随着初始车头时距的减小,开始释放油门时间有着明显下降趋势.根据方差分析,车头时距(F[2,99]=7.95,P=0.000 6)对开始释放油门时间影响显著,表2中同样反映了这一点.
方差分析表明,完全释放油门时间和制动转移时间均未受到初始车头时距或前车减速度的显著影响,说明这里2个变量是较为固定的值(两者之和在0.8 s附近),不受工况紧急程度的影响.Young和Stanton[16]也发现制动转移时间的取值较为固定,并解释为:当驾驶员有更多时间来应对前车的突然制动时,驾驶员将这部分时间应用于感知活动(开始释放油门时间)而不是机械性活动(油门释放至开始制动的转移时间).

a 长初始车头时距
b 中等初始车头时距
c 短初始车头时距

表2 已有研究感知反应时间值及油门释放时间值总结
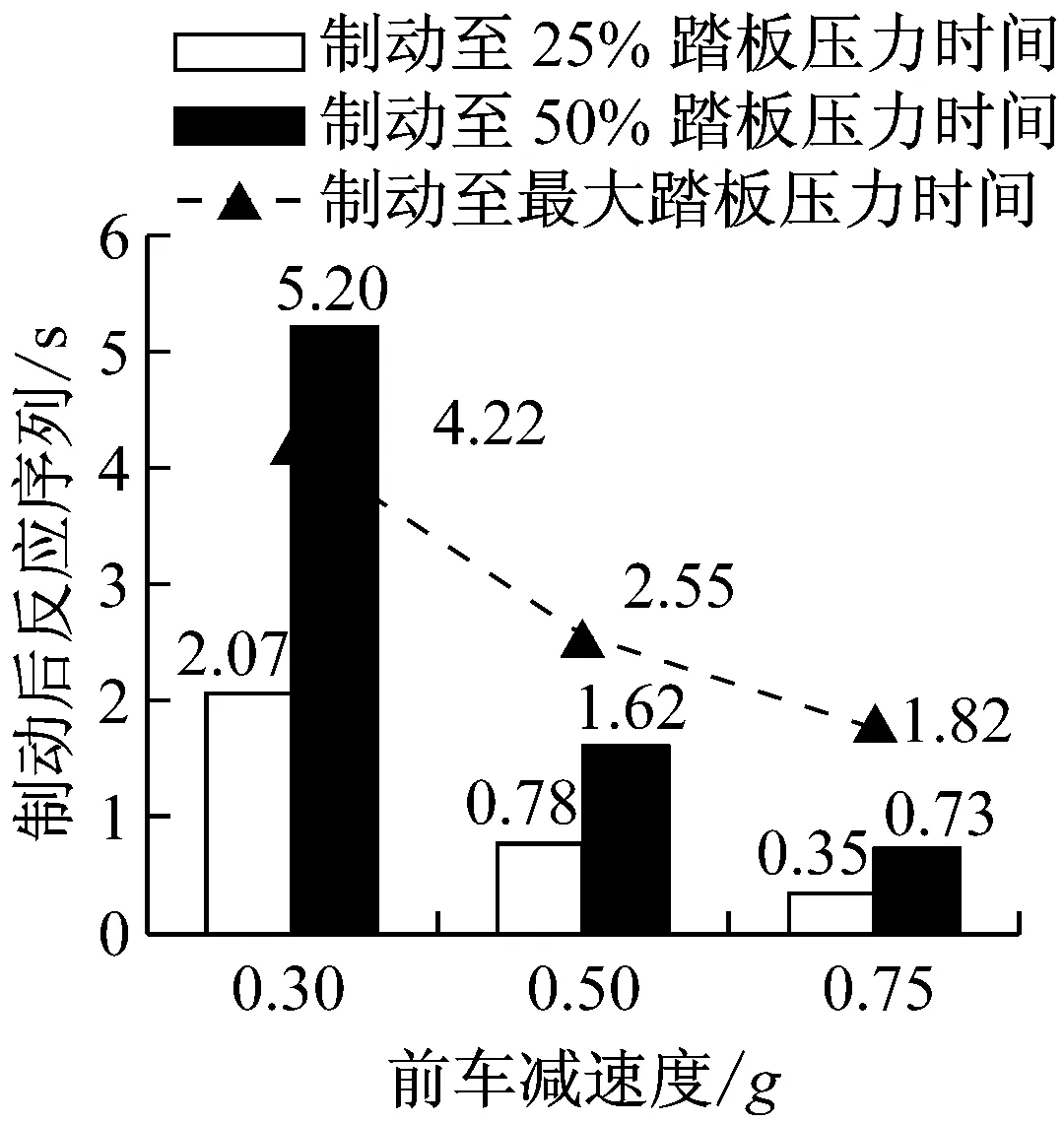
3.4制动后反应序列
制动后反应序列由制动至25%踏板压力时间、制动至50%踏板压力时间、制动至最大踏板压力时间组成,图9展示了不同车头时距和前车减速度下制动后反应序列的均值.制动至25%和50%踏板压力时间均随着前车减速度的增加而减小,随着车头时距的减小而减小.而制动至最大踏板压力时间仅随着前车减速度的增加而减小.方差分析结果表明,初始车头时距及前车减速度对制动至25%和50%踏板压力时间有显著影响,而制动至最大踏板压力时间只受前车减速度的影响.

a 长初始车头时距

b 中等初始车头时距

c 短初始车头时距
制动后反应序列反映了驾驶员从开始制动到刹车踏板达到不同程度压力值之间的时间延误,已有研究中[6]也指出了这种延误的存在,即驾驶员在开始制动后不一定迅速地达到最大刹车踏板压力,而是根据当时的状况对施加的踏板压力进行调节.本文得到的制动至最大踏板压力时间在不同的工况条件下分布范围为0.92~4.21 s,表现出极大的变化差异.为了探究这种差异产生的原因,图 10对比了紧急程度相差最大的2组工况下的刹车踏板压力曲线,所有曲线均被映射到0~1.0的时间轴上以便于比较,0代表前车开始制动的时刻,1.0代表后车静止或碰撞发生后5 s.
a 长初始车头时距

b 中等初始车头时距

c 短初始车头时距
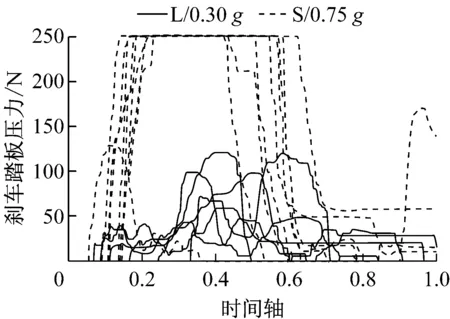
图10 刹车踏板压力曲线对比
由图10可以看出,在非常紧急的工况(S/0.75g)下,驾驶员开始制动后迅速达到最大刹车踏板压力并保持这一刹车力度一段时间.而在不太紧急的工况(L/0.30g)下,驾驶员表现出了多阶段刹车[17]的行为:面对前车的突然制动,驾驶员首先使踏板压力达到一个比较小的值并维持一段时间,在这段时间内,如果驾驶员发现无法以现有踏板压力成功避险,驾驶员会施加更大的踏板压力直至脱离危险.Every等[17]在卡车驾驶员中观察到了类似的现象.这种多阶段刹车行为导致驾驶员需要更多的时间才能达到最大刹车踏板压力.
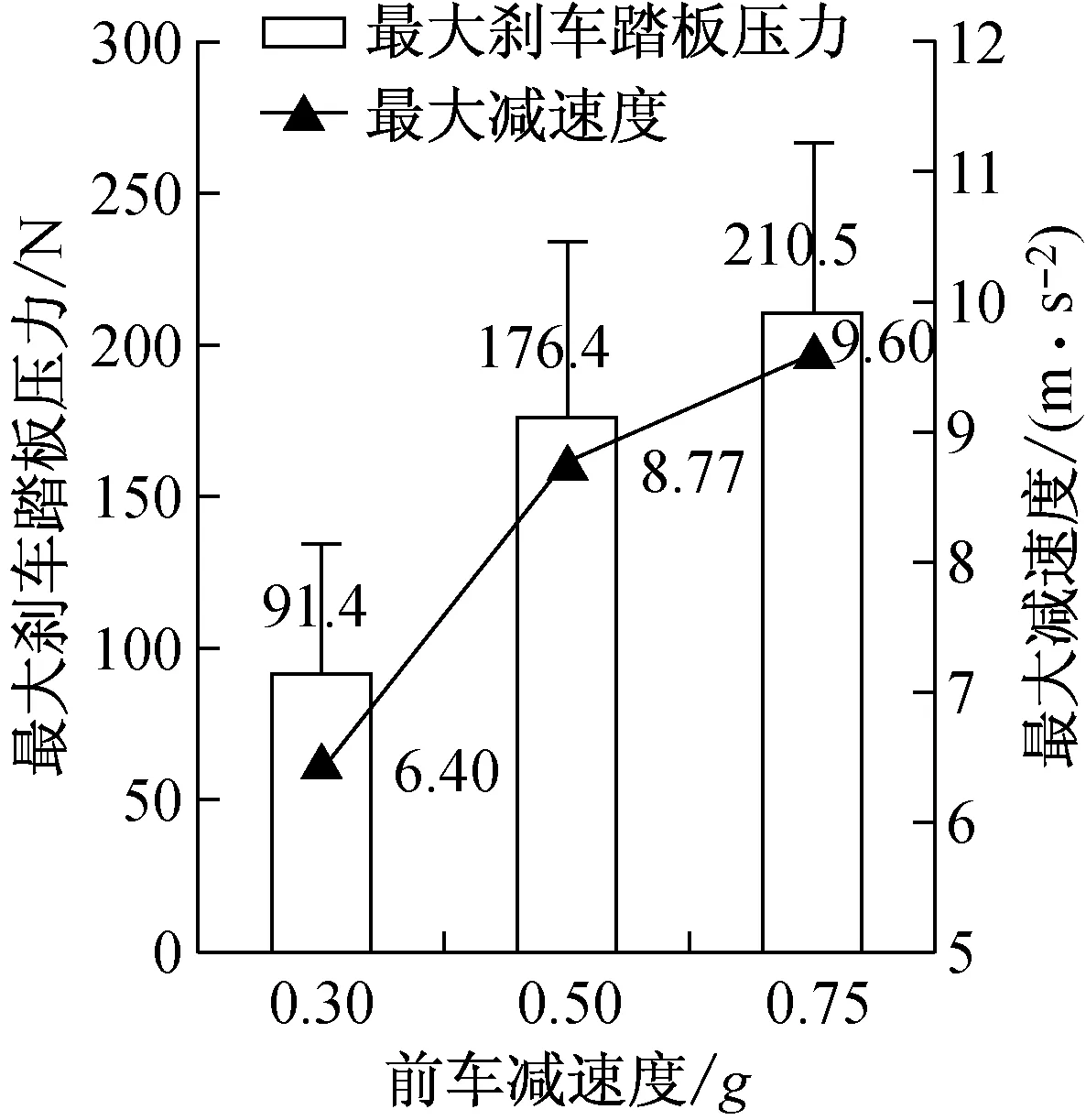
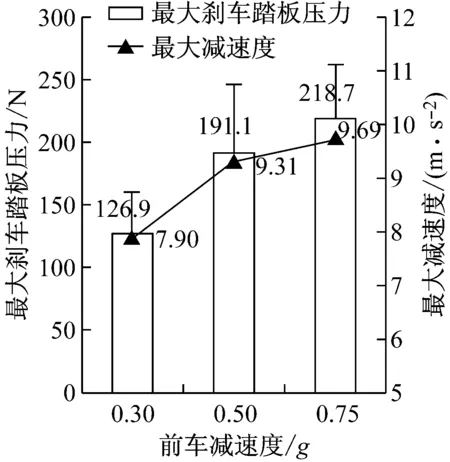
3.5制动顶峰特征
图11展示了不同车头时距和前车减速度下最大刹车踏板压力及最大减速度的均值.最大刹车踏板压力及最大减速度均随着前车减速度的增加而增大.方差分析结果表明,前车减速度(F[2,98]=50.38,P<0.000 1)对最大刹车踏板压力影响显著;车头时距(F[2,99]=5.60,P=0.005 0)及前车减速度(F[2,99]=25.50,P<0.000 1)均对最大减速度有显著影响.
a 长初始车头时距

b 中等初始车头时距
c 短初始车头时距
最大刹车踏板压力及最大减速度反映了驾驶员的制动力度.根据上面的分析,驾驶员的制动力度随着工况紧急程度的提高而增大,图10也反映了这一点:L/0.30g工况下的刹车踏板压力明显低于S/0.75g下.
4结论
利用同济大学8自由度高仿真驾驶模拟器研究了追尾临撞工况紧急程度对驾驶员避撞行为的影响.通过不同初始车头时距(<1.0 s, [1.0 s,1.5 s), [1.5 s,2.5 s])和不同前车减速度(0.30g, 0.50g, 0.75g)的组合,建立了不同紧急程度的前车减速临撞工况,比较了不同紧急程度下避撞行为的差异.
分析结果表明:①随着工况紧急程度的增加,驾驶员更快地释放油门及达到最大刹车踏板压力,并且施加更大的制动力度;②当初始车头时距为1.5 s左右时,驾驶员感知反应时间约为1.2 s,而当初始车头时距增大到2.5 s以上时,感知反应时间变得非常大,甚至达到了3 s;③驾驶员开始释放油门与开始制动间的转移时间不受工况紧急程度影响,保持在0.8 s附近;④在低紧急程度下,驾驶员表现出了多阶段刹车行为,使得驾驶员需要更多的时间才能达到最大刹车踏板压力.
研究结果将深化对临撞工况下驾驶员避撞行为的理解,同时也可为驾驶员反应时间及刹车行为建模提供借鉴.此外,研究结果可用于优化前向避撞预警系统及刹车辅助系统.
参考文献:
[1]National Highway Traffic safety Administration. Traffic saftey facts 2013[R]. Washinton D C: Department of Transportation, National Highway Traffic Saftey Administration, 2013.
[2]Deng B, Chen X, Wang X. Shanghai 2020 driving scenario models and traffic 5 accident models development [R]. Shanghai: Tongji University, 2011.
[3]Van Winsum W, Heino A. Choice of time-headway in car-following and the role of time-to-collision information in braking [J]. Ergonomics, 1996, 39(4): 579.
[4]Green M. “How long does it take to stop?” methodological analysis of driver perception-brake times [J]. Transportation Human Factors, 2000, 2(3): 195.
[5]Summala H. Brake reaction times and driver behavior analysis [J]. Transportation Human Factors, 2000, 2(3): 217.
[6]Ising K W, Droll J A, Kroeker S G,etal. Driver-related delay in emergency braking response to a laterally incurring hazard [C]//Proceedings of the Human Factors and Ergonomics Society 56th Annual Meeting. Santa Monica: Sage Publications, 2012: 705-709.
[7]Muttart J W. Estimating driver response times [C]//Handbook for Forensic Human Factors in Litigation (Ch. 14). Boca Raton: Taylor & Francis, 2005: 1-25.
[8]Liebermann D G, Ben-David G, Schweitzer N,etal. A field study on braking responses during driving. I. Triggering and modulation [J]. Ergonomics, 1995, 38(9): 1894.
[9]Hulst M V D. Anticipation and the adaptive control of safety margins in driving [J]. Ergonomics, 1999, 42(2): 336.
[10]Adams L D. Review of the literature on obstacle avoidance maneuvers: Braking versus steering [R]. Michigan: The University of Michigan, 1994.
[11]Ohlhauser A D, Milloy S, Caird J K. Driver responses to motorcycle and lead vehicle braking events: The effects of motorcycling experience and novice versus experienced drivers [J]. Transportation research part F: Traffic Psychology and Behaviour, 2011, 14(6): 472.
[12]Abe G, Richardson J. Alarm timing, trust and driver expectation for forward collision warning systems [J]. Applied Ergonomics, 2006, 37(5): 577.
[13]Abe G, Richardson J. The effect of alarm timing on driver behaviour: an investigation of differences in driver trust and response to alarms according to alarm timing [J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2004, 7(4): 307.
[14]Lee J D, McGehee D V, Brown T L,etal. Collision warning timing, driver distraction, and driver response to imminent rear-end collisions in a high-fidelity driving simulator [J]. Human Factors: The Journal of the Human Factors and Ergonomics Society, 2002, 44(2): 314.
[15]Lee J, McGehee D, Dingus T,etal. Collision avoidance behavior of unalerted drivers using a front-to-rear-end collision warning display on the Iowa driving simulator [J]. Transportation Research Record: Journal of the Transportation Research Board, 1997, 1573: 1.
[16]Young M S, Stanton N A. Back to the future: Brake reaction times for manual and automated vehicles [J]. Ergonomics, 2007, 50(1): 46.
[17]Every J L, Salaani M K, Barickman F S,etal. Braking behavior of truck drivers in crash imminent scenarios [J]. SAE International Journal of Commercial Vehicles, 2014, 7(2014-01-2380): 487.
收稿日期:2015-11-04
基金项目:国家自然科学基金优秀青年基金(51522810); “十二五”国家科技支撑计划(014BAG01B03)
中图分类号:U491
文献标志码:A
Impacts of Situational Urgency on Drivers’ Collision Avoidance Behaviors
WANG Xuesong, ZHU Meixin, CHEN Ming
(Key Laboratory of Road and Traffic Engineering of the Ministry of Education, Tongji University, Shanghai 201804, China)
Abstract:Using the high fidelity Tongji University driving simulator with 8 degrees of freedom, this study examined impacts of situational urgency on drivers’ collision avoidance behaviors. By combining different initial headways (<1.0 s, [1.0 s, 1.5 s), [1.5 s, 2.5 s]) and different lead vehicle deceleration rates (0.30g, 0.50g, 0.75g), rear-end collision scenarios with different levels of situational urgency were established. Drivers’ perception response times (PRT), throttle release response times, throttle to brake transition times, brake delays, maximum brake pedal pressures and peak decelerations were compared across different levels of situational urgency. Results show: ①At higher situational urgency, drivers release the accelerator faster, and brake to maximum more quickly and forcefully; ②PRT was near 1.2 s when the initial headway was round 1.5 s, but PRT increased dramatically when initial headways were larger than 2.5 s, and could even reach 3 s; ③Transition time between throttle release and brake initiation is about 0.8 s and is not affected by situational urgency; ④At lower situational urgency, multi-stage braking behavior leads to longer delay from brake initiation to full braking.
Key words:rear-end collisions; collision avoidance behavior; perception response time; braking delay; situational urgency; driving simulator
第一作者: 王雪松(1977—),男,教授,工学博士,主要研究方向为交通安全、交通统计分析、交通规划、驾驶模拟器应用.
E-mail:wangxs@tongji.edu.cn