基于新型扩张观测器的导弹滑模制导律
2016-07-22 10:29任宏滨王华吉梁雁君
探测与控制学报 2016年3期
冯 丹,任宏滨,王华吉,梁雁君
(空军工程大学防空反导学院,陕西 西安 710051)
基于新型扩张观测器的导弹滑模制导律
冯丹,任宏滨,王华吉,梁雁君
(空军工程大学防空反导学院,陕西 西安 710051)
摘要:针对已有滑模制导律未考虑系统量测噪声的问题,提出了基于新型扩张状态观测器的导弹滑模制导律。该方法通过新型扩张状态观测器观测目标加速度并实时补偿滑模制导律,使导弹拦截机动目标时脱靶量更小,提高了拦截性能。仿真结果表明,基于新型扩张状态观测器设计的滑模制导律相较于传统的滑模制导律鲁棒性更强,具有工程实用性,也验证了新型扩张状态观测器的有效性。
关键词:制导律;滑模控制;机动目标拦截;扩张观测器
0引言
随着科技的进步,导弹在速度、机动性和敏捷性方面的优势逐渐减弱,比例导引法等经典导引律在拦截大机动目标时效果明显下降。20世纪50年代滑模变结构控制方法出世,该方法通过切换控制量,使系统滑动在滑模面上,并且对外加干扰保持不变性,在制导律设计方面得到了广泛的应用[1]。但由于设计中视线角加速度,目标加速度等不可测参数的出现,影响了制导律的设计,文献[2-3]直接将不确定项或者不可量测的参数忽略,导致仿真条件过于理想,影响实际中的制导效果。文献[4]采用观测器估计目标机动加速度,设计了滑模制导律,但并未考虑系统量测噪声的影响。本文针对此问题,提出了基于新型扩张状态观测器的导弹滑模制导律。
1弹目相对运动模型
这里采用二维制导模型推导方法,结论可拓展到三维模型。图1为弹目相对运动关系示意图。将图中速度矢量分别进行分解可得弹目相对运动模型为:
(1)
(2)
对式(2)两边求导,整理可得
(3)
式中,Vm、Vt为导弹与目标的速度;am、at分别为导弹和目标的加速度矢量,θm、θt分别为导弹和目标的弹道倾角;R为弹目相对距离,q为视线角。atq、amq分别为目标和导弹垂直于视线方向上的分量。



图1 弹目相对运动关系Fig.1 Missile-target relative geometry relation
2新型扩张状态观测器
扩张状态观测器(ESO,ExtendedStateObserver)是自抗扰控制器[5]的核心,一种新型的非线性状态观测器,不仅可以观测到系统的所有的状态,还能观测到系统包含的内扰和外扰。非常适合于目标机动形式未知、只有量测输出和控制输入的机动目标加速度估计问题[6-7]。但输出量测环节量普遍存在噪声[8],会对观测值的造成很大影响,需要对输出进行滤波,这里将一阶滤波器引入扩张观测器,推导带滤波器的扩张观测器系统,称为新型扩张状态观测器,简称NESO。选取一阶低通滤波器,其方程为:
(4)
(5)
对系统(5)构造扩张状态观测器,即得系统(3)的新型扩张状态观测器方程为
(6)
其中,e0是新型扩张观测器的估计值与真实值的误差,z0、z1、z2为观测器输出估计值,β00,β01,β02是观测器的增益,函数fal定义如下
(7)
式中,0<α<1。
假定ξ是常值,将式(5)、式(6)做差得新型扩张状态观测器的误差方程为:
(8)
对式(8)求导
(9)

(10)
由式(10)可以看出只要β02的取值远远大于ξ,误差就会趋于零,NESO的观测值就更精确。这就说明观测器观测精度主要取决于参数β00,β01,β02的合理选择。美国的高志强博士给出了用二项式(s+ω)m展开式的系数来确定参数的办法,韩京清也给出过1/h幂次形式的经验公式,但只有前三个参数可以根据经验选取,若系统阶数增高,参数的选取就无法确定[9]。为此,韩京清又提出β的取值满足菲波纳奇数列[10],只要剔除数列中个别数,就可以获得具有继承性的β取值序列。具体的β值列举如下:

3基于新型扩张状态观测器的滑模制导律
利用滑模控制理论[11]设计导引律一般分为两步:第一步,选择切换平面;第二步选择趋近律使系统轨迹到达切换平面并在滑动面上移动。如果视线角速率越接近于零,导弹命中目标的几率越高,因此选取滑模面
(11)
为保证系统状态能到达滑模面且到达的过程中性能优良,选趋近律为:
(12)
将式(11)求导并带入式(3)可得
(13)
由式(12)、式(13)可得滑模制导律为:

(14)

k>0,ε>0,δ>0
(15)
其中,f为目标加速度。则传统滑模制导律(SMG,slidingmodeguidance)为:

k>0,ε>0,δ>0
(16)
可见传统滑模制导律中,会因为外部干扰无法精确测量,将f项列为未知项或直接将其忽略,这样就会对制导律性能造成影响。而这里采用新型扩张状态观测器的估计值补偿传统滑模制导律中的忽略项,并考虑自动驾驶仪的动态特性,推出一种基于新型扩张状态观测器的滑模制导律,简称ESMG。
由于自动驾驶仪结构十分复杂,这里将其考虑为一阶惯性环节[12],时域关系为:
(17)
由图1可知
(18)
对式(18)求导后,带入式(17)得
(19)

(20)

(21)
4仿真结果

新型扩张状态观测器的参数参考2节中的参数序列选取,在这些固定值附近结合本文实际,通过大量仿真实验选取NESO的参数为:β00=50、β01=320、β02=1 350、α1=0.9、α2=0.1、δ1=0.2、δ2=0.1。
仿真结果如图2—图6所示。图2为SMG和ESMG在目标做正弦机动下的弹道仿真图,可以看出两者都可以导引拦截弹成功击中目标,但有目标加速度补偿的ESMG相较于SMG弹道更加平缓,耗能更小。图3对比了两种制导律情况下导弹法向过载,可见SMG的过载超出了仿真条件中导弹的最大法向过载,而ESMG的法向过载不仅满足仿真条件并且变化平滑,耗能最小。表1中的数据表明文中设计的基于新型扩张状态观测器的滑模制导律,拦截时间较短,脱靶量更小。对比仿真结果,验证了ESMG的优越性。
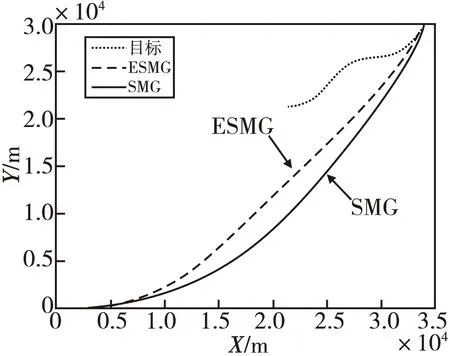
图2 弹目运动轨迹Fig.2 Flight trajectories
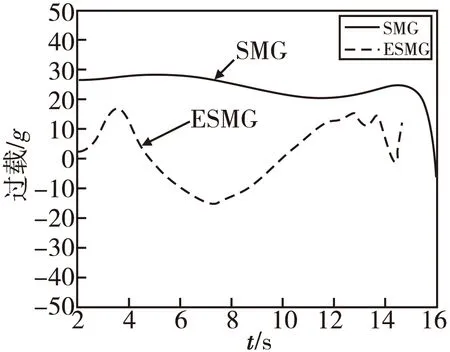
图3 导弹法向过载Fig.3 Missile normal acceleration
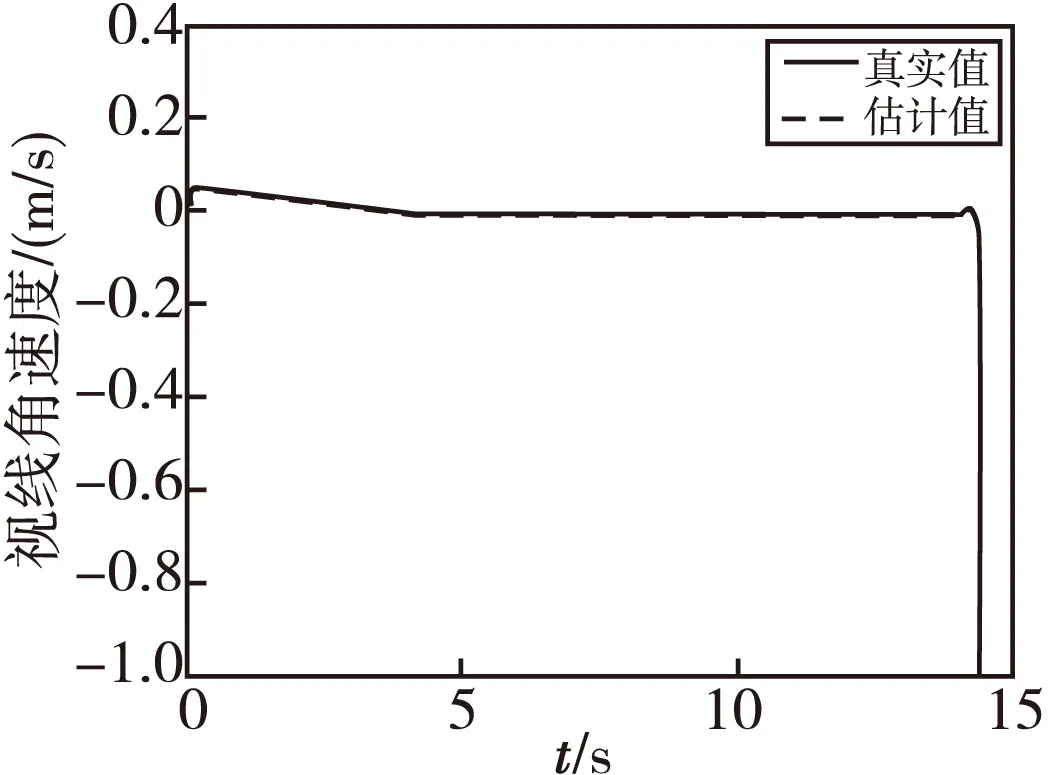
图4 视线角速度Fig.4 Line-of-sight rate
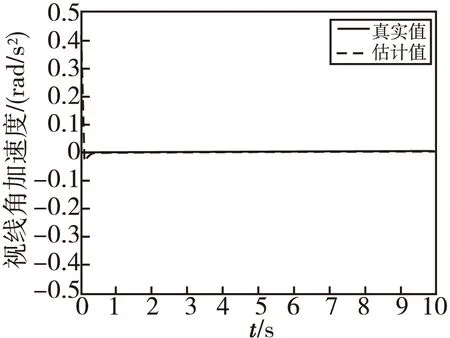
图5 视线角加速度Fig.5 Line-of-sight angle acceleration

图6 NESO的目标加速度估计结果Fig.6 The NESO estimation value of target’s acceleration

图7 NESO的观测误差Fig.7 The NESO estimation error value
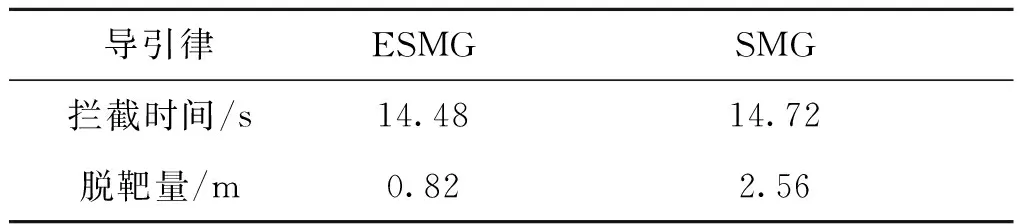
导引律ESMGSMG拦截时间/s14.4814.72脱靶量/m0.822.56
图4、图5分别为视线角速度和角加速度的估计值和真实值,抖动弱,收敛快。ESMG通过使用连续函数代替开关函数并且用观测值代替了实际值,削弱了传统滑模制导律中抖振问题。图6为通过NESO获得目标加速度的观测值和真实值,可见观测器参数选择合理,获得目标的加速度信息误差小,为制导律的制导精度提供了相对精确的参数。从图7可以看出NESO的观测误差小,同步效果较好。
5结论
本文提出了基于新型扩张观测器的滑模制导律,该方法通过新型扩张观测器的观测值动态补偿传统滑模制导律中未知干扰项,使导弹拦截机动目标时脱靶量更小,提高了对机动目标的拦截性能。仿真表明新型扩张观测器观测误差小,收敛快,可以实时跟踪目标机动状态,并滤除了噪声的影响,为制导律的设计提供较为精确的参数。基于新型扩张状态观测器的滑模制导律,耗能小、精度高、鲁棒性强,由于考虑了自动驾驶仪动态特性,更具有工程实用性。
参考文献:
[1]Zhou D,Mu C D,Xu W L. Adaptive siding-mode guidance of a homing missile[J].Journal of Guidance, Control and Dynamics, 1999, 22 (4): 589-594.
[2]Zhou D,Mu C D,Ling Q. Optimal sliding-mode guidance of a homing missile[J].Chinese Journal of eronautics, 1999,12(4):236-241.
[3]谷志勇,沈明辉,韩彦东.最优滑模变结构末制导律设计[J].弹箭与制导学报,2013,34(1):69-72.
[4]花文华,陈兴林.基于观测器的滑模制导律[J].电光与控制,2012,19(1):95-99.
[5]韩京清.自抗扰控制器及其应用[J].控制与决策,1998,13(1):19-23.
[6]张尧,郭杰,唐胜景,等.基于扩张状态观测器的导弹滑模制导律[J].北京航空航天大学学报,2015,41(2):343-350.
[7]姚郁,王宇航.基于扩张状态观测器的机动目标加速度估计[J].系统工程与电子技术,2009,31(11):2682-2684,2692.
[8]林飞,孙湖,郑琼林,等.用于带有量测噪声系统的新型扩张状态观测器[J].控制理论与应用, 2005,22(6):995-998.
[9]韩京清.自抗扰控制技术—估计补偿不确定因素的控制技术[M].北京:国防工业出版社,2008:221-237.
[10]韩京清.扩张状态观测器参数与菲波纳奇数列[J].控制工程,2008,15(9):1-3.
[11]刘金琨.滑模变结构控制MATLAB仿真[M].北京:清华出版社,2005:44-45.
[12]熊少锋,王卫红,刘晓东,等. 考虑导弹自动驾驶仪动态特性的带攻击角度约束制导律[J].控制与决策,2015,30(4):585-592.
*收稿日期:2015-12-03
作者简介:冯丹(1991—),女,陕西兴平人,硕士研究生,研究方向:导航、制导与控制。E-mail:fengshujunior@163.com。
中图分类号:V448.13
文献标志码:A
文章编号:1008-1194(2016)03-0104-05
Missile Sliding Mode Guidance Law Based on Extended State Observer
FENG Dan, REN Hongbin, WANG Huaji, LIANG Yanjun
(Air and Missile Defense College, Air Force Engineering University, Xi’an 710051, China)
Abstract:Aiming at the problem that the original sliding mode guidance law does not consider the problem of system measurement noise, a missile sliding mode guidance law based on the new extended state observer (NESO) was put forward. This method estimated target acceleration according NESO and dynamically compensated guidance law online, which made missing distance smaller when intercepting maneuvering target and improved interception performance. The simulation results showed that compared with the traditional sliding mode guidance law, the missile sliding mode guidance law based on NESO has advantage in robust under a maneuvering target and engineering practicability. Moreover, the simulation results confirmed the effectiveness of NESO in practice.
Key words:guidance law; sliding mode control; maneuvering target interception; ESO