汽车自动驾驶测评方法研究
2016-07-21 09:54何承坤宋娟周唯中国软件评测中心智能汽车测试实验室北京100048
工业技术创新 2016年2期
关键词:安全
何承坤,宋娟,周唯(中国软件评测中心智能汽车测试实验室,北京,100048)
汽车自动驾驶测评方法研究
何承坤,宋娟,周唯
(中国软件评测中心智能汽车测试实验室,北京,100048)
摘 要:近年来,汽车自动驾驶发展如火如荼,国内外纷纷把自动驾驶、智能汽车作为国家重要发展战略目标。但在快速发展的同时,相关安全问题凸显。本文针对汽车自动驾驶发展过程中的安全问题,基于驾驶员与自动驾驶系统的相似性,提出了一种系统的、全面的汽车自动驾驶测评方法,并针对国内当前亟需开展测评的相关内容进行了分析和架构设计。
关键词:自动驾驶汽车;测试与评价;安全;驾驶行为;智能汽车
引言
近年来,智能汽车、自动驾驶汽车技术正处于飞跃式发展阶段。据麦肯锡公司发布的《展望2025:决定未来经济的12大颠覆技术》研究报告[1],智能汽车排名第六,并预估2025年其潜在的经济价值为2000亿~19000亿美元。美国咨询机构IHS预测[2]:智能汽车将在2025年左右走进寻常百姓家,2035年销量将达到1180万辆,占同期全球汽车市场总销量的9%。美国《美国ITS战略计划2015-2019》[3]明确了实现汽车网联化、加速汽车智能化两大核心战略,提出了车辆和道路更安全、增强交通移动性、降低环境影响、促进改革创新、支持交通系统信息共享等5项发展战略。欧盟《欧洲自动驾驶智能系统技术路线报告》[4]指出:到2020年,通过自动驾驶技术的应用,实现污染物排放降低20%,道路交通伤亡率降低50%;到2050年,污染物排放降低50%,道路交通伤亡率接近零。
我国《<中国制造20 2 5>重点领域技术路线图》[5]指出:中国汽车保有量已达1.5亿辆。至2020年,远程通讯互联终端整车装备率将达50%,驾驶辅助(DA)、部分自动驾驶(PA)车辆市场占有率约30%。2025年,远程和短程通讯终端的整车装备率增至80%,DA、PA车辆占有率保持稳定,高度自主驾驶(HA)车辆市场占有率约10%~20%。
国外主流汽车企业以及互联网企业正强力研发自动驾驶。谷歌已经完成了第一辆无人驾驶汽车原型,无人驾驶汽车的最高时速将达25英里(约合40千米),在路况清晰的环境下可“看到”最多相当于两个足球场长度的距离。奔驰在无人驾驶技术上已经相当成熟,实验车以120公里每小时完成了从德国城市之间超过100km的行驶路程,并且它全程都采用了自动驾驶技术并通过了城市和郊区各种复杂路况的考验。沃尔沃在中国的城市公共道路上首次测试自动驾驶技术,这辆汽车在西六环主路自动行驶12公里,测试包括了自动跟车停车、沿路自动行驶、避让车辆、手机操控泊车等项目。特斯拉拥有世界上第一款应用自动驾驶技术的量产车型,与其它竞争对手相比,能够将自动驾驶技术推向市场,进行大量的实践。特斯拉可以依靠全球的用户,完成遍布全球的广泛路试,了解全球各地的消费者驾驶习惯、道路环境,获得大量的数据和经验。除此之外,还有奥迪、宝马、现代、日产、通用、丰田、雷克萨斯等也纷纷在自动驾驶领域发力。
国内汽车企业和互联网企业也不甘在自动驾驶领域落后。长安宣布智能汽车发展战略,计划2025年实现全自动驾驶,其在睿骋车型上实现的无人驾驶汽车,计划2016年4月从重庆出发,沿高速公路驶向北京,参加北京国际车展。百度在乌镇世界互联网大会上将无人驾驶汽车亮相各国政要面前,该车在北京京新高速、五环完成路测,往返全程均实现自主控制,测试时最高速度达100公里/小时,并完成了多次跟车、加减速、变道、超车、上下匝道、调头等驾驶动作。此外,上汽、一汽、广汽、北汽、东风、长城、一汽红旗、奇瑞、吉利、比亚迪等也纷纷涉足自动驾驶领域。
1 汽车自动驾驶的安全挑战
自动驾驶相关安全问题已经凸显。
1.1 交通安全问题
2015年11月之前,谷歌无人驾驶试验车总行驶里程已经超过320万公里,共发生过17起事故,密歇根大学交通科学研究院2015年10月的一份研究报告[6]指出:自动驾驶汽车的事故发生率是普通车辆的两倍,但自动驾驶汽车从来都不是过错方,而是由于其他的社会车辆并不都习惯自动驾驶车辆行驶特点。然而就在2016 年2月14日,Google无人驾驶车犯错撞上公交车,零责任记录被打破。根据加州车辆管理局(DMV)的资料显示:该车驾驶员说他相信公车会减速,让无人驾驶车并线进来,但是公车并没有。所以三秒钟后,这辆处在自动驾驶状态的无人车撞上了巴士的侧面。
1.2 信息安全问题
从2010年3月美国得克萨斯州GPS遥控事件,2011年3月美国华盛顿大学汽车攻击面的综合实验性分析报告[7],2011年9月DEF CON黑客大会上短信解锁斯巴鲁傲虎,2013年9月DEF CON黑客大会上通过OBD-II控制福特翼虎和丰田普锐斯的方向盘、刹车、油门等,2014年4 月360公司表示特斯拉汽车应用程序存在漏洞,2014年8月黑帽大会上一份调研报告指出许多知名汽车的电子系统都存在安全风险[8],2015 年2月通用安吉星被破解并可实现“定位、解锁和远程启动”,同月美国Ed Markey办公室发布了《车联网安全漏洞研究报告》[9],2015年7月菲亚特克莱斯勒召回约140万辆汽车,至2016 年1月全球首部汽车网络安全标准—SAE J3061发布。与汽车信息安全相关事件的发生频率越来越高,攻击范围越来越广,引起全球广泛关注!
1.3 功能安全问题
功能安全标准ISO26262[10]在部分国家已列为强制标准,然而目前的ISO26262标准尚未针对自动驾驶汽车,预计到2018年发布的新版标准中才会增加自动驾驶部分。(ISO26262采用三个参数评价汽车安全完整性等级,包括:危险造成伤害的严重程度S、危险所在工况的发生概率E、驾驶员采取控制避免危险的难易程度C。那如何评定无人驾驶汽车的功能安全?仅仅考虑控制避免危险的难易程度C为最高就可以了吗?)而目前国内对现有ISO26262标准的转化工作仍未完成,缺乏针对自动驾驶的汽车功能安全标准及其技术的研究。能否抓住自动驾驶汽车发展机遇,形成突破和创新仍面临挑战。
2 国内现状
缺乏系统的综合试验验证环境。尽管杭州、北京、长春、重庆、常熟、嘉定等地启动了智能网联汽车示范验证基地项目,探索解决智能交通、智能驾驶、智能应用等问题,但由于刚刚处于起步摸索阶段,还需要总体规划,进一步明确各自的定位与分工,更深入研究建立综合试验验证环境的任务路线图。国内仅有部分厂商拥有一些硬件在环测试台架,缺乏独立的测试评价机构及测评环境。
尚未形成自动驾驶安全标准体系。我国在自动驾驶的交通安全、信息安全和功能安全标准制订方面进度落后,结合我国国情转化国外标准工作也比较缓慢。与企业沟通较少或者较为片面,对企业引导和指导性不够。
尚未形成针对性的安全测评技术。国内逐渐认识到自动驾驶汽车的信息安全、功能安全和交通安全问题,但相关测评技术、方法处于起步阶段。导致汽车功能安全测评、信息安全测评步步跟随国外,缺少突破和创新。
3 测评方法
3.1 建立综合试验验证环境
(1)自动驾驶相关产业最迫切的需求是产业链体系规划和建设。公平的第三方认证、检测和验证为其互联互通互操作提供保障。
主管机构:面向行业的管理要求和安全可靠要求,事中事后的监管措施。
地方政府:完善区域产业配套环境,营造良性的产业发展生态环境。
整车企业:集成,市场认可,行业监管要求。
零部件企业:智能应用、部件的验证与推广。
通信企业:通信终端的验证与推广。
为了满足这些需求,自动驾驶产业最迫切的需求是提供一个公认的、综合平台能够提供上路准许试验验证、安全可靠试验验证、互联互通试验验证、产品研发试验验证等服务。
(2)为产业发展布局,搭好综合试验验证环境这一平台,促进关键技术发展,服务产品研发。
我们应该要搞清楚未来的自动驾驶应该是什么样的。汽车行业把自动驾驶分为三类:一类是自主式自动驾驶,以车载传感器为感知核心;一类是网联式自动驾驶,以网络通信为感知核心;第三类是自主网联式也叫智能网联式,以车载传感器为感知核心同时以网络通信为辅助。我们认为智能网联式是未来最为可能实现的自动驾驶方式,如图1所示。

图1 智能网联式自动驾驶相关系统
针对这样系统,建立综合试验验证环境,关键之处在于处理试验验证相关标准体系和质量保障问题,核心在于需要给出互联互通的标准——车端应用层中间件或数据融合的标准、云端应用层中间件或基础数据交互平台的标准,如图2所示,使得所有符合这些标准和质量要求的自动驾驶汽车、系统、部件、应用等都可以在这个综合平台上进行试验验证,而这些试验验证获得的成果又可以反过来使得所制定的车端应用层中间件或云端应用层中间件的标准得到试验验证,从而为推广到更大规模做准备,同时推动自动驾驶关键技术的试验验证与进步,如图3所示。

图2 综合试验验证环境建设的关键技术

图3 综合试验验证环境推动关键技术发展
3.2 开展自动驾驶安全测评
3.2.1 传统汽车检测概况
在中国,为了保障人身安全和行驶安全,传统汽车上路前需要通过零部件试验、总成和系统试验、整车试验等110项室内和室外的强制性检测标准,如图4所示。

图4 传统汽车测评项目概况
为了保障传统汽车的上路安全,尚需如此复杂的测试,要保障自动驾驶汽车上路的上路安全又需要何种复杂的测试?
3.2.2 自动驾驶安全测评机制
自动驾驶汽车从根本上改变了传统的“人——车——路”闭环控制方式,采用自动驾驶系统将驾驶员从该闭环系统中替换出去,不仅大大提高了交通系统的效率和安全性,还给人们的出行方式和生活方式带来了更多的可能。
自动驾驶系统的核心目的是确保自动驾驶系统能够安全可靠地替换或部分替换驾驶人员的操纵。自动驾驶系统与驾驶员的相似之处如图5所示,二者都包含了相应的感知、联通、决策和执行四个关键环节,这四个环节是否正常是检验合格驾驶员是否能够安全可靠地驾驶车辆的关键要素。世界各国“核准”驾驶员是否可以上路主要采用考驾照的方式,借鉴这一过程,自动驾驶系统拿到上路的“许可牌照”也应遵循类似的考核体系。
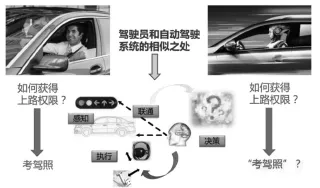
图5 自动驾驶系统与驾驶员的相似之处
目前,驾驶员考驾照一般包括“体检”、“场地考”、“路考”三个阶段,如表1所示,“体检”阶段主要考核人员是否具备驾驶车辆的基本素质,包括是否成年、耳聪目明、手脚灵活、身体健康以及抵抗力强等,“场地考”主要考察人员是否能够承担关键的驾驶任务,包括在驾驶车辆时是否具备头脑清晰、方向感好等能力,“路考”主要考核人员在真实道路环境下能否处理复杂情况的能力,即考察驾驶技术是否娴熟。

表1 自动驾驶系统测评与驾驶员考核的对照
与此相对,“考核”自动驾驶系统也应包含类似的考核(表1所示),至少应包括以下内容:
※“体检”:
ü 网络联通、环境感知测评——“耳聪目明”
ü 控制执行测评——“手脚灵活”
ü 功能安全测评——“身体健康”
ü 信息安全测评——“免疫系统好”
ü 软件成熟度测评——“成年”
※“场地考”:
ü 行为决策测评——“头脑清晰”
ü 路径规划测评——“方向感好”
※“路考”:
ü 综合智能测评——“驾驶技术娴熟”
3.2.3 国内开展自动驾驶安全测评的思路与计划
但若一开始就进行如此复杂的“许可牌照”测评,并不利于自动驾驶汽车的发展。为了既能对自动驾驶汽车的安全行驶进行有效监管,同时又不阻碍自动驾驶汽车的发展甚至推进自动驾驶汽车的发展,国内开展自动驾驶测评可以分为三步进行:
第一步:自动驾驶汽车上路测试前,核准其是否具备基本的上路测试能力要求,包括随车驾驶员需求和自动驾驶汽车需要满足的基本安全需求,如图6所示,满足这些要求后准许其去一些简单的、不影响交通的道路上有限制地进行测试。
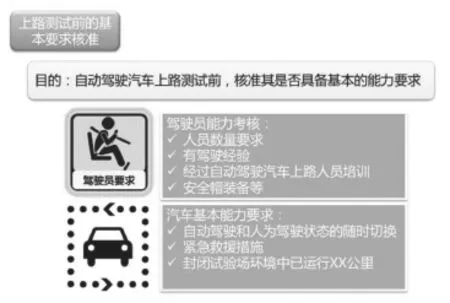
图6 开展自动驾驶测评的第一步
第二步:自动驾驶汽车上路测试后一段时间后,评估其在不同复杂环境下的行为安全,只有其驾驶行为满足一定的安全需求后,才允许其到复杂的道路上进行测试,如图7所示。
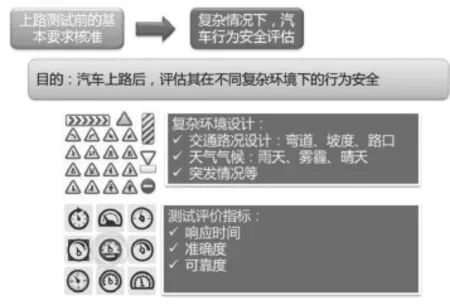
图7 开展自动驾驶测评的第二步
第三步:自动驾驶汽车满足行为安全的评估后,要进行全方面、细致的测评,才能正式上路运行,并推广市场,如图8所示。

图8 开展自动驾驶测评的第三步
根据《<中国制造2025>重点领域技术路线图》,我们可以得出开展自动驾驶测评应有的时间节点(如图9所示),即2016年左右应核准并颁发自动驾驶汽车部分路段测试牌照、2017年左右应测评自动驾驶汽车的驾驶行为安全性并颁发全路况的测试牌照,2018年至2030年应完成自动驾驶的综合测评并颁发上路牌照。

图9 开展自动驾驶测评的步骤
3.2.4 当前亟需开展的自动驾驶安全测试验证的主要内容
在上面提及三步思路中,第一步的做法我们可以借鉴当前国际先进水平的做法,尤其是美国的做法,在确定自动驾驶汽车和跟车驾驶员能够保障汽车行驶安全的前提下尽早的让其上路测试。然而我们也要吸取其经验教训,重点就在于第二步的做法。在让自动驾驶汽车到更复杂路况下进行测试之前,我们需要尽早开展自动驾驶系统驾驶行为的安全评估,可以从以下几个方面进行,如图10所示。
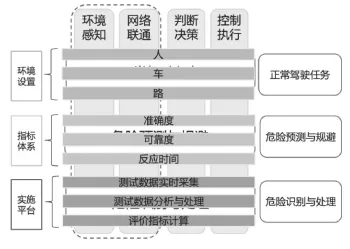
图10 自动驾驶行为安全测评体系
从横向上我们需要从环境感知、网络联通、判断决策和控制执行分析它们对自动驾驶行为安全的影响。
从纵向上我们需要考虑三个条件:正常驾驶任务、危险预测与规避、危险识别与处理。正常驾驶任务方面主要考察自动驾驶系统是否能够在不涉及危险情况下正常完成车辆的驾驶任务,是衡量自动驾驶系统驾驶行为是否安全的基础;危险预测与规避方面主要考察自动驾驶系统是否能够在危险发生前预估危险即将出现并采取措施的能力;危险识别与处理方面主要考察自动驾驶系统是否能够识别已经发生和释放的危险,并采取合理的措施处理危险情况。这三方面中,当自动驾驶系统具备基本驾驶能力后,尤其要考察自动驾驶系统对危险的响应。
在此基础上,开展自动驾驶行为安全测试验证,涉及三方面内容:首先是环境设置或场景设置,需要考虑如何协调人、车、路的要素实现测试环境的设置满足上面提及的横向上和纵向上的测评需求;其次,制定指标体系,实现从横向和纵向上对自动驾驶行为的评定,主要从“准”、“稳”、“快”三方面展开——即准确度、可靠度、反应时间;最后,需要建立自动驾驶行为安全测试的实施平台,包括测试数据的实时采集、测试数据分析与处理、评价指标计算等。
4 结论
本文通过分析驾驶员与自动驾驶系统的相似之处,从环境感知、控制执行、功能安全、信息安全、软件成熟度、行为决策、路径规划和综合智能等方面,提出了一种系统的、全面的汽车自动驾驶测评方法,并针对当前亟需开展测评的相关内容——自动驾驶行为安全性测评进行了分析和架构设计。期望本文的研究工作能为国内确保自动驾驶汽车的安全上路提供服务、支持和借鉴。
参考文献
[1] 詹姆斯·玛尼卡, 理查德·多布斯, 迈克尔·崔, 展望2025:决定未来经济的12大颠覆技术 [R].麦肯锡, 2013.
[2]JULIUSSEN E, IHS自动驾驶预测报告 [R].IHS Automotive,2013.
[3]BARBARESSO J, CORDAHI G, GARCIA D, et al., USDOT's Intelligent Transportation Systems (ITS) ITS Strategic Plan 2015-2019 [R].US Department of Transportation, Intelligent Transportation Systems, Joint Program Office, 2014.
[4]DOKIC J, M LLER B, MEYER G, European Roadmap Smart Systems for Automated Driving [R].European Technology Platform on Smart Systems Integration, 2015.
[5] 国家制造强国建设战略咨询委员会, 《中国制造 2025》重点领域技术路线图 [R].《中国制造 2025》重点领域技术创新绿皮书, 2015.
[6]SCHOETTLE B, SIVAK M, A Preliminary Analysis of Real-World Crashes Involving Self-Driving Vehicles [R].The University of Michigan Transportation Research Institute, 2015.
[7]CHECKOWAY S, MCCOY D, KANTOR B, et al.Comprehensive experimental analyses of automotive attack surfaces [M].Proceedings of the 20th USENIX conference on Security.San Francisco, CA; USENIX Association.2011: 6-6.
[8]MILLER C, VALASEK C, A Survey of Remote Automotive Attack Surfaces [R].IOActive, 2015.
[9]MARKE E J, Markey Report Reveals Automobile Security and Privacy Vulnerabilities [R].the staff of Senator Edward J.Markey, 2015.
[10]STANDARDIZATION I O F.ISO26262 Road vehicles Functional safety Part 1-10 [S].Switzerland.2011.
Research for Automobile Autopilot Testing and Evaluation Method
Chengkun He, Juan Song, Wei Zhou
(China Software Testing Center Smart Car Testing Lab, Beijing, 100048, China)
Abstract:In recent years, the technology of autonomous vehicles develops very well.Autonomous vehicles or Smart cars have been mentioned in an important national development strategy at home and abroad.But in the rapid development, related security and safety issues has been showing.In this paper, to deal with the security and safety issues, based on the similarity of the driver of the Autonomous vehicle system, a systematic and comprehensive solutions for automobile autopilot testing and assessment is proposed.The relevant content analysis and architecture design is carried out for the evaluation which needs to be done recently in China.
Key words:Autonomous Vehicles; Testing and Evaluation; Safety/Security; Driving Behavior; Smart Car
中图分类号:TP206.1
文献标识码:A
文章编号:2095-8412 (2016) 02-108-07
DOI:工业技术创新 URL: http//www.china-iti.com 10.14103/j.issn.2095-8412.2016.02.003
作者简介:

何承坤 (1986-), 男,博士,工程师。研究方向:智能汽车测试。
E-mail: hechengkun@cstc.org.cn
宋 娟 (1984-),女,博士,高级工程师。研究方向:汽车信息安全检测。
周 唯 (1988-),男,硕士,工程师。研究方向:汽车信息安全检测。
猜你喜欢
科技视界(2016年21期)2016-10-17
科技视界(2016年20期)2016-09-29
科技视界(2016年20期)2016-09-29